Изобретение относится к машиностроению и может быть использовано в роботах различного назначения (промышленных, сельскохозяйственных, медицинских, бытовых и других).
Предшествующий уровень техники
Известен хобот манипулятора RU 2008201, включающий корпус, привод и шарнирно установленную на корпусе систему кинематически связанных между собой посредством шарниров предыдущих и последующих рычагов, причем на обращенных друг к другу концах рычагов выполнены зубчатые венцы с диаметром делительной окружности, центр которой совпадает с центром шарнира, причем зубья венца каждого последующего рычага находятся в зацеплении с зубьями венца рычага, предшествующего предыдущему.
К недостаткам данного хобота манипулятора следует отнести то, что рычаги или элементы манипулятора, поворачиваются на равный угол по отношению друг к другу и только в одной (заданной) плоскости, а также то, что изменение положения каждой части манипулятора происходит при одновременном изменении положения других его частей, чем ограничивается степень свободы перемещения объекта манипулирования.
Кроме того, недостатком данного хобота манипулятора является падение усилия от привода на каждом последующем рычаге.
Раскрытие изобретения
В основу настоящего изобретения положена задача - создать манипулятор свободным от указанных недостатков. Предлагается манипулятор, конструкция которого основана на принципе управления цепью взаимодействующих элементов посредством управления функциональными межэлементными зазорами.
Это достигается тем, что конструкция манипулятора представляет собой цепь последовательно соединенных взаимоподвижных элементов. Каждый элемент имеет рабочую поверхность, взаимодействующую с предыдущим элементом, и рабочую поверхность, взаимодействующую с последующим элементом. Формы этих поверхностей обеспечивают наличие определенных зазоров между элементами при соединении их в конструкцию, что позволяет элементам свободно перемещаться в сторону устранения этих зазоров. Взаимным перемещением последовательно соединенных элементов и обеспечивается изменение пространственного положение всего манипулятора или какой-либо его части.
Рабочим положением каждой пары предыдущего и последующего элементов является такое, когда полностью устранен один из зазоров между элементами этой пары, чем обеспечивается жесткость конструкции.
Любое из возможных рабочих положений манипулятора достигается определенной комбинацией устраненных зазоров между каждой парой предыдущих и последующих элементов.
Так, для манипулятора, состоящего из элементов, форма которых обеспечивает одинаковое количество зазоров (степеней свободы) между каждым предыдущим и каждым последующим элементом, справедлива формула:
K=Zn-1,
где количество фиксированных пространственных положений манипулятора;
Z - количество зазоров между каждой парой элементов;
n - количество элементов манипулятора.
Изменение положений элементов в каждой паре предыдущих и последующих элементов происходит под воздействием управляемой силы, воздействующей на данную пару элементов и приводящей элементы к положению, при котором устранен определенный зазор между их поверхностями. Такое воздействие может производиться путем создания между элементами электромагнитного поля, электростатического поля, зон повышенного (пониженного) давления жидкости или газа и т.д.
Описание чертежей
Фиг.1 - продольный разрез электромагнитного манипулятора.
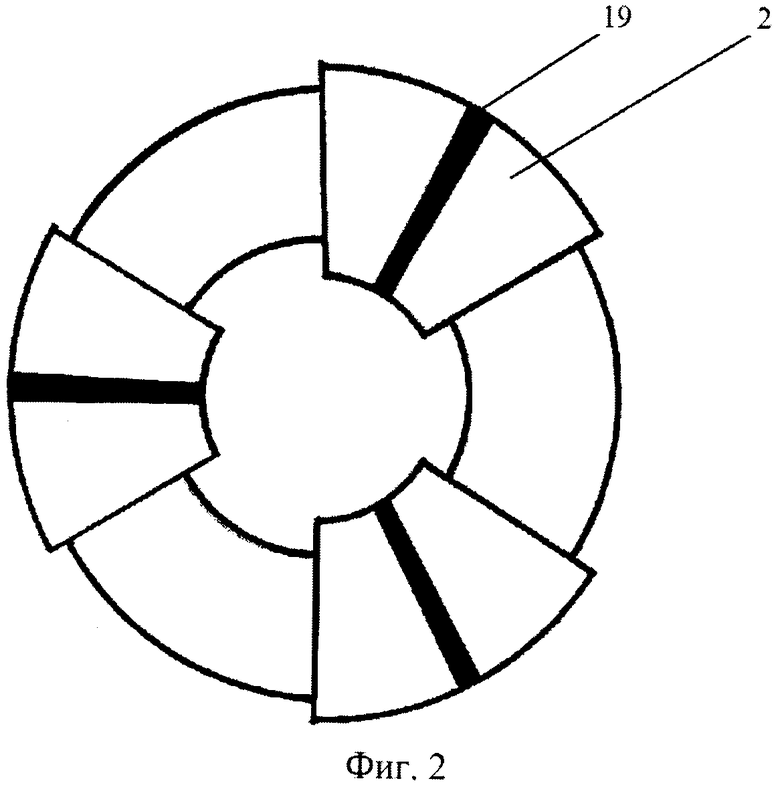
Фиг.2 - внешний вид элемента электромагнитного манипулятора.
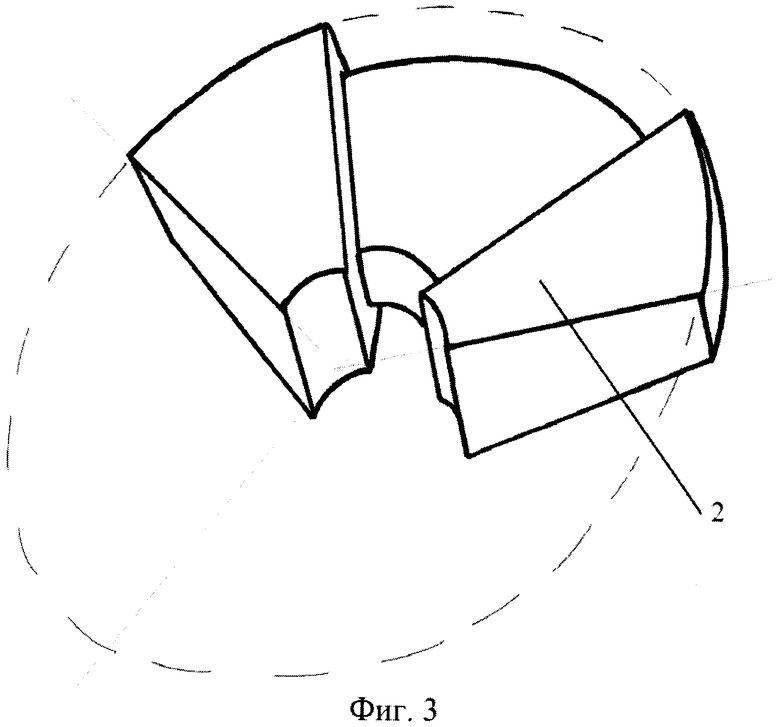
Фиг.3 - магнитопровод элемента электромагнитного манипулятора.
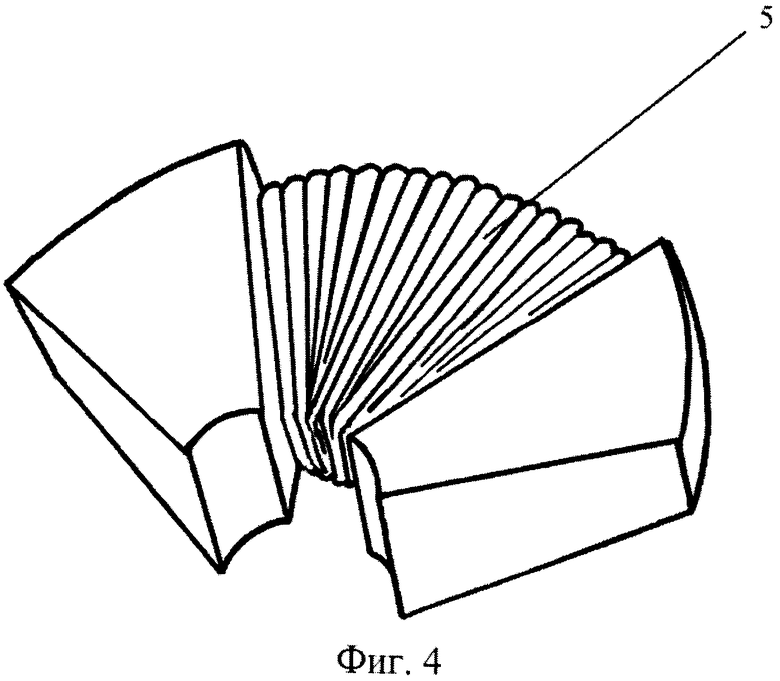
Фиг.4 - электромагнит элемента электромагнитного манипулятора.
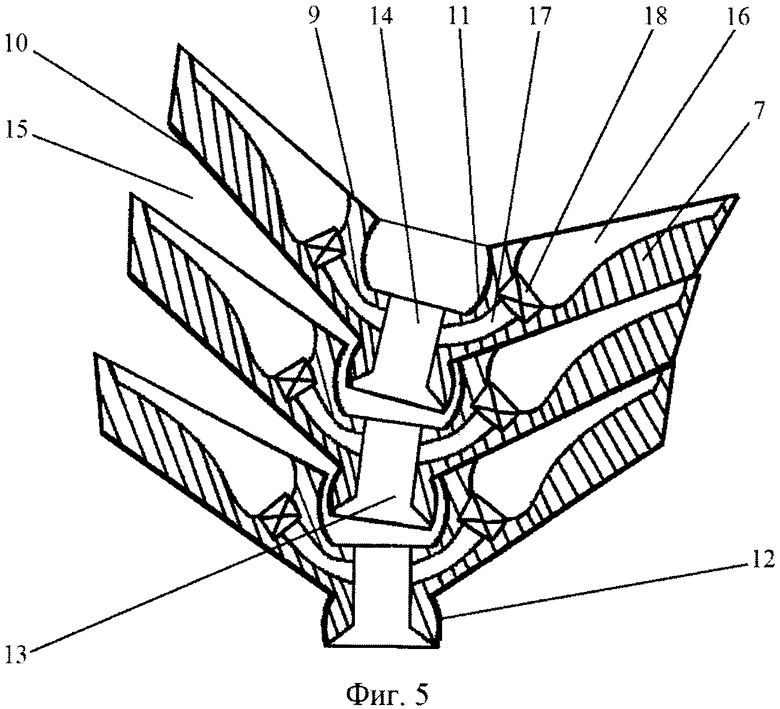
Фиг.5 - продольный разрез пневматического манипулятора.
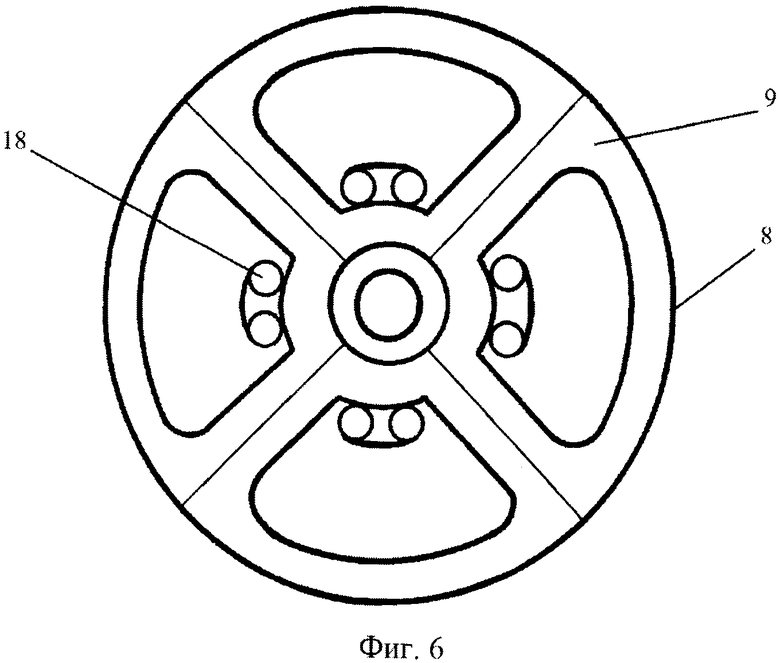
Фиг.6 - внешний вид элемента пневматического манипулятора.
Лучшие варианты осуществления изобретения
Манипулятор, содержащий цепь взаимодействующих между собой элементов 1 (фиг.1), каждый из которых состоит из трех сегментов 2 (фиг.3), представляющих из себя электромагниты (фиг.4). Сегменты 2 соединены (фиг.2) упругим эластичным материалом 19 в элемент манипулятора таким образом, что у элемента образуются рабочая поверхность 3 (фиг.1), взаимодействующая с последующим элементом, и рабочая поверхность 4, взаимодействующая с предыдущим элементом. Поверхность 3 образована тремя плоскостями, секущими тело элемента 1, представляющего из себя цилиндр, под углом «альфа». Поверхность 4 также образована тремя плоскостями, секущими тело элемента 1 под углом «сигма». Угол «альфа» меньше угла «сигма» на величину, определяющую размер зазоров 6 между элементами.
Движение манипулятора обеспечивается путем подачи электрического напряжения на токопроводящие обмотки 5 (фиг.1) электромагнитов, в связи с чем возникают электромагнитные силы притяжения и (или) отталкивания между элементами, обеспечивая заданное взаимное положение элементов. Заданное положение манипулятора в пространстве обеспечивается определенной комбинацией коммутаций токопроводящих катушек элементов манипулятора.
Возможно также создание манипулятора, в котором управляемая сила, воздействующая на элементы, является результатом действия повышенного (пониженного) давления жидкости или газа. Такой манипулятор содержит цепь последовательно соединенных между собой элементов 7 (фиг.5), каждый из которых состоит из четырех сегментов 8 (фиг.6), соединенных таким образом, что эти сегменты образуют рабочую поверхность 9, взаимодействующую с последующим элементом, и рабочую поверхность 10, взаимодействующую с предыдущим элементом. При этом поверхность 9 (фиг.5) имеет осевое сферическое углубление 11, а поверхность 10 имеет осевую сферическую выпуклость 12, которые образуют шарнирную пару. Указанное шарнирное соединение обеспечивает необходимое взаимное позиционирование и целостность всей цепи элементов. При этом осевые отверстия 14 образуют герметичный канал 13, используемый для прохождения жидкости или газа. Поверхность 9 образована четырьмя плоскостями, секущими тело элемента 7, представляющего из себя цилиндр, под углом «альфа». Поверхность 10 также образована четырьмя плоскостями, секущими тело элемента 7 под углом «сигма». Угол «альфа» меньше угла «сигма» на величину размера зазоров 15 между элементами 7.
В теле элемента устроены полости 16, соединенные сквозными отверстиями 17 с осевым отверстием 14. При этом каждое отверстие 17 снабжено настраиваемым клапаном 18, открытие или закрытие которого обеспечивает прохождение жидкости или газа из полости 16 в канал 13 и обратно.
Движение манипулятора обеспечивается созданием пониженного давления жидкости или газа в канале 13. При открытии клапана 18 в полости 16 создается зона пониженного давления, что приводит к взаимному встречному перемещению элементов 7 до полного устранения зазора 15. При этом поверхность 10 перекрывает полость 16, образуя герметично замкнутую камеру, что позволяет элементам 7 находиться в данном положении в течение необходимого времени.
Изменение взаимного положения отдельных пар и всей цепи элементов достигается созданием зон повышенного или пониженного давления в полостях 16 и канале 13.
Заданное положение манипулятора в пространстве обеспечивается определенной комбинацией открытых и (или) закрытых клапанов 18.
Промышленная применимость
Манипулятор может быть использован для решения технических задач во всех без исключения областях деятельности человека.
Изменение взаимного положения физических объектов в пространстве является основным фактором существования физической вселенной, а управляемое перемещение предметов является материальной основой любой деятельности человека.
Универсальность манипулятора обусловлена многовариантностью его изготовления в зависимости от конкретного предназначения устройства. Манипулятор (с учетом среды его применения и поставленных задач) может быть изготовлен любого геометрического размера, любой мощности, из любых материалов.
Непосредственный технический результат от использования изобретения состоит в возможности реализации большего, по сравнению с имеющимися конструкциями, количества свобод пространственного перемещения манипулятора, при более низком энергопотреблении и при отсутствии необходимости использования дополнительных устройств (дополнительной энергии) для фиксации манипулятора (его частей) в заданных положениях.
Конструкция манипулятора позволяет ему принимать любые формы в пространстве, причем положение любой движущейся части манипулятора не обусловлено определенным положением других его частей. Данная особенность позволяет использовать манипулятор в сложных геометрических пространствах, например в трубопроводах. Функционально эффективным может быть манипулятор, состоящий даже из отдельной цепи: для перемещения жестко закрепленного на нем объекта или для перемещения объекта, захваченного по принципу удава. Однако наиболее перспективной областью применения изобретения является создание сложных манипуляторов, состоящих их нескольких цепей, соединенных в устройство по принципу кисти человека.
С учетом того, что современные компьютерные системы способны производить любые вычисления координат для положения объекта в пространстве, манипулятор позволяет решать задачи любой технической сложности, такие как воссоздание ходьбы, машущего полета, создание эффективных протезов утраченных конечностей человека. При этом энергопотребление устройства на основе предлагаемого манипулятора значительно ниже, чем у известных устройств того же назначения. Данная особенность позволяет использовать в конструкции манипулятора современные автономные источники энергии.
Примером эффективного использования изобретения является создание на основе манипулятора устройства для уборки и утилизации мусора. Известно, что промышленные и бытовые отходы состоят из объектов различной конфигурации, массы, плотности, что затрудняет унификацию операций по их утилизации. В то же время устройство на основе предлагаемого манипулятора способно осуществлять сбор и перемещение в пространстве любого мусора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиальная электромагнитная опора для активного магнитного подшипника | 2021 |
|
RU2763352C1 |
| УНИПОЛЯРНЫЙ БЕСКОЛЛЕКТОРНЫЙ ТОРЦОВЫЙ ГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 2004 |
|
RU2284629C2 |
| БЕСКОЛЛЕКТОРНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1998 |
|
RU2130682C1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1996 |
|
RU2118036C1 |
| Предохранительное устройство | 2017 |
|
RU2649661C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД ВЫКЛЮЧАТЕЛЯ | 2015 |
|
RU2605938C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2002 |
|
RU2233496C1 |
| Электродвигатель с электромагнитным подвесом ротора | 1983 |
|
SU1163422A1 |
| ШАРНИР МАНИПУЛЯТОРА | 2005 |
|
RU2283217C1 |
| Электродвигатель | 1988 |
|
SU1658284A1 |
Изобретение относится к машиностроению. Технический результат - повышение универсальности. Манипулятор по первому варианту содержит цепь взаимодействующих элементов, причем каждый элемент включает в себя два или более магнитопроводов, один или более из которых оснащены токопроводящей обмоткой с образованием электромагнитов. Манипулятор по второму варианту содержит цепь последовательно соединенных между собой элементов, каждый из которых выполнен с осевым отверстием и состоит из двух или более сегментов. Сегменты соединены между собой таким образом, что образуются рабочая поверхность, взаимодействующая с последующим элементом, и рабочая поверхность, взаимодействующая с предыдущим элементом. Осевые отверстия образуют герметичный канал для прохождения жидкости или газа, а в каждом элементе выполнены полости, соединенные сквозным отверстием через настраиваемый клапан. 2 н. и 3 з.п. ф-лы, 6 ил.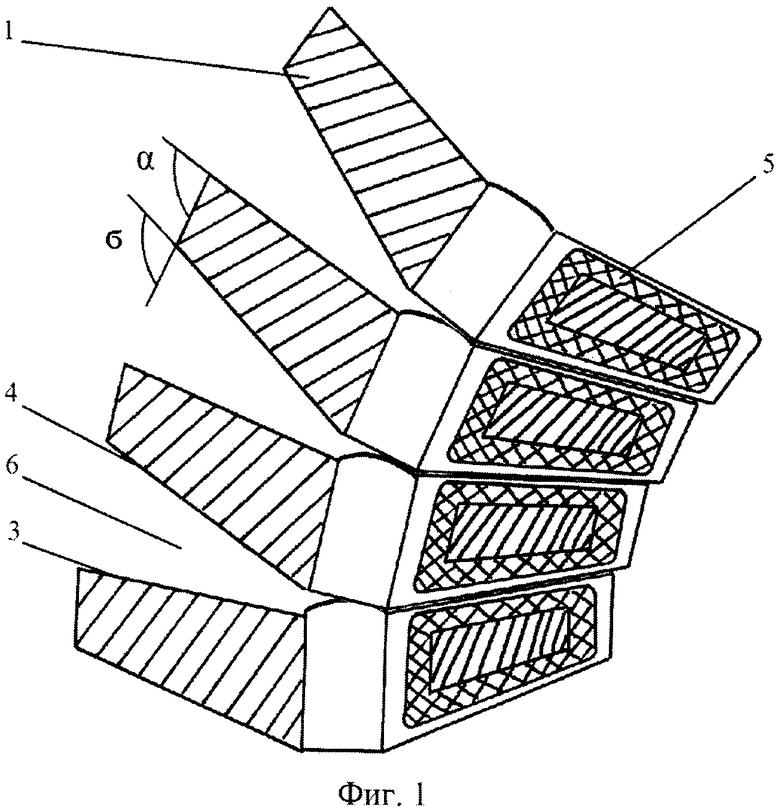
1. Манипулятор, содержащий цепь взаимодействующих элементов, отличающийся тем, что каждый элемент включает в себя два или более магнитопроводов, один или более из которых оснащены токопроводящей обмоткой с образованием электромагнитов, причем форма каждого из магнитопроводов выполнена таким образом, что при их соединении в элемент формируется зазор между поверхностью, взаимодействующей с последующим элементом, и поверхностью, взаимодействующей с предыдущим элементом, необходимый для взаимного перемещения элементов в заданное положение под действием электромагнитного поля, возникающего в результате подачи электрического напряжения на токопроводящие обмотки электромагнитов.
2. Манипулятор по п.1, отличающийся тем, что магнитопроводы электромагнитов соединены в элементы манипулятора эластичным материалом для обеспечения взаимного упругого смещения магнитопроводов.
3. Манипулятор по п.1 или 2, отличающийся тем, что один или более элементов в цепи выполнены с двумя или более рабочими поверхностями, взаимодействующими с двумя или более последующими или предыдущими элементами, для соединения нескольких цепей.
4. Манипулятор, содержащий цепь последовательно соединенных между собой элементов, отличающийся тем, что каждый элемент выполнен с осевым отверстием и состоит из двух или более сегментов, соединенных таким образом, что образуются рабочая поверхность, взаимодействующая с последующим элементом, и рабочая поверхность, взаимодействующая с предыдущим элементом, при этом рабочая поверхность, взаимодействующая с последующим элементом, содержит осевое сферическое углубление, а рабочая поверхность, взаимодействующая с предыдущим элементом, содержит осевую сферическую выпуклость, которые образуют шарнирное соединение, обеспечивающее целостность всей цепи элементов, при этом осевые отверстия образуют герметичный канал для прохождения жидкости или газа, а в каждом элементе выполнены полости, соединенные сквозным отверстием через настраиваемый клапан с осевым отверстием элемента.
5. Манипулятор по п.4, отличающийся тем, что один или более элементов в цепи выполнен с двумя или более рабочими поверхностями, взаимодействующими с двумя или более последующими или предыдущими элементами для соединения нескольких цепей.
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
| Механическая рука /ее варианты/ | 1985 |
|
SU1278210A1 |
| Механическая рука | 1975 |
|
SU568346A3 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

