Изобретение относится к общему машиностроению, в частности к промышленным роботам, используемым преимущественно на операциях окраски.
Цель изобретения - повышение маневренности манипулятора.
На чертеже представлена кинематическая схема хобота манипулятора.
Хобот манипулятора включает корпус 1, привод 2 качания начального звена 3. привод 4 качания ведущего стержня 5, Начальное звено 3 и ведущий стержень 5 установлены своими цапфами в подшипниках 6 и 7, размещенных в перпендикулярных плоскостях на корпусе 1. Начальное звено 3 на конце несет наружный элемент 8 сферического шарнира 9, охватывающий внутренний элемент 10. Последний снабжен двумя цапфами 11, пропущенными через продольные отверстия, выполненные в наружных элементах 8. Цапфы 11 присоединены к последующему звену 12. Плоскость расположения осей продольных отверстий в общем случае наклонена к продольной оси начального звена 3. Аналогичным образом соединены и последующие звенья хобота. Внутренние и наружные элементы снабжены стержнями 13 и 14, кинематически связанными между собой дополнительным сферическим шарниром 15.
Хобот манипулятора работает следующим образом
При включении привода 4 осуществляется поворот в подшипниках 7 ведущего стержня 5, который посредством сферического шарнира 15 преобразуется в поворот стержня 13 и связанного с ним последующего звена 12. Далее этот поворот по цепочке передается всем остальным звеньям 12. При нулевом угле наклона плоскости расположения продольных отверстий на наружном элементе 8 хобот приобретает изгиб в
плоскости, перпендикулярной к оси поворота ведущего стержня 5, как показано на фиг. 1. Если угол между этой плоскостью и продольной осью начального звена 3 отличен от нуля, то при перемещении цапф 11 в отверстиях наружного элемента 8 происходит поворот внутреннего элемента 10 относительно продольной оси начального звена 3, Такой же поворот происходит во всех сферических шарнирах, вследствие чего хобот выходит из плоскости чертежа. Аналогичным образом происходит движение при включении привода 2. При одновременной работе обоих приводов происходит сложение движений.
Ф о р м у л а и 3 о б р е т е н и я Хобот манипулятора, содержащий корпус, приводы поворота и шарнирно установленный на корпусе исполнительный орган, выполненный в виде последовательно связанных с помощью основных сферических, шарниров полых звеньев, предыдущие из которых жестко связаны с наружными элементами сферических шарниров, а последующие - с внутренними его элементами, причем все элементы сферических шарниров имеют стержни, отличаю Щ:И и с я тем, что, с целью повышения маневренности, он снабжен размещенными в полостях звеньев до.полнительными сферическими шарнирами, сопряженные элементы каждого из которых жестко связаны с концами стержней соответственно внутренних и внешних элементов основных смежных шарниров, при этом выходной вал одного привода кинематически связан с первым звеном, а выходной вал другого привода - с соответствующим стержнем первого дополнительного сферического шарнира, причем оси качания этих звена и стержня расположены во взаимно перпендикулярных плоскостях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора | 1983 |
|
SU1140946A1 |
| Шарнир манипулятора | 1990 |
|
SU1782722A1 |
| Хобот манипулятора | 1979 |
|
SU870107A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| ШАРНИР МАНИПУЛЯТОРА (ВАРИАНТЫ) | 2005 |
|
RU2284896C1 |
| РОБОТ-ШАР | 2015 |
|
RU2600043C2 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
Изобретение относится к общему машиностроению и может быть использовано в промышленных роботах, преимуществ^еннодля окрасочных работ. Цель изобретения - повышение маневренности. Хобот состоит из отдельных звеньев 12, последовательно соединенных посредством сферических шарниров 9, наружные 8 и внутренние 10 элементы которых снабжены стержнями 13 и 14, кинематически связанными между собой посредством дополнительных сферических шарниров 15. При включении привода 4 осуществляется поворот ведущего стержня 5, который через дополнительные 15 и основные 9 сферические шарниры осуществляет поворот звеньев 12. Такой же поворот звеньев 12, но в перпендикулярной плоскости, осуществляется от привода 2-1 ил./f/5/5/*ОыGJ СО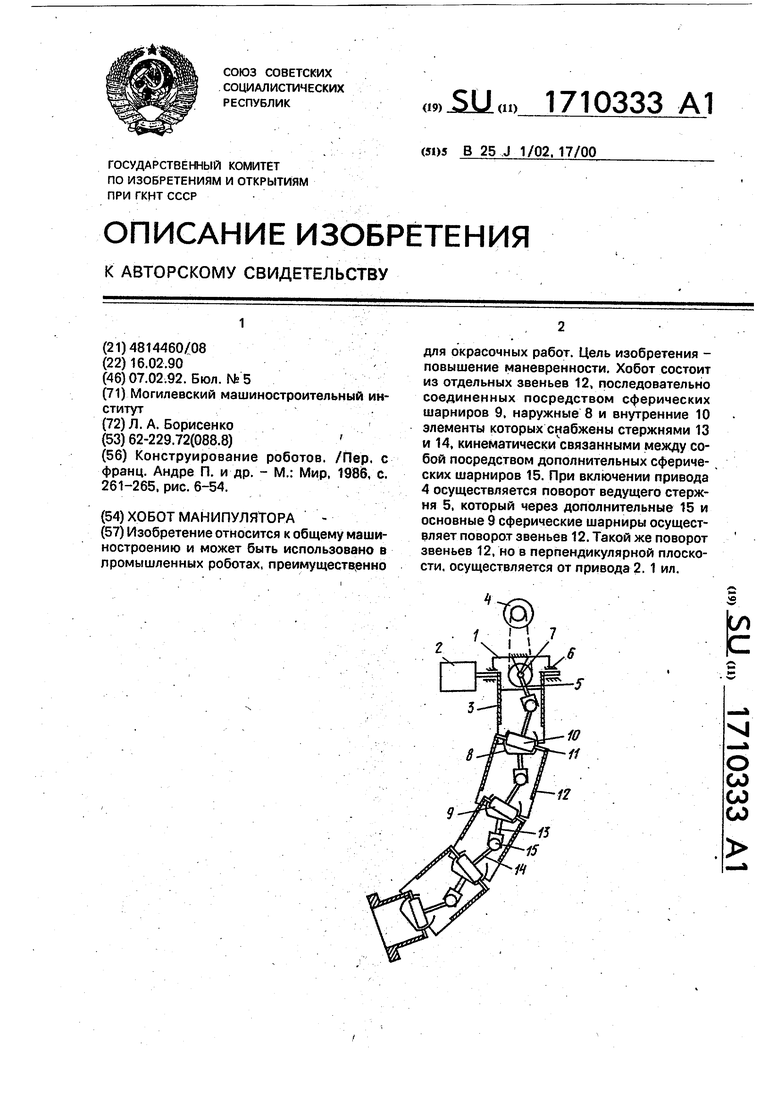
| Конструирование роботов | |||
| /Пер | |||
| с франц | |||
| Андре П | |||
| и др | |||
| - М.: Мир, 1986, с | |||
| Одновальный, снабженный дробителем, торфяной пресс | 1919 |
|
SU261A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
