Изобретение относится к машиностроению, а именно, к манипуляторам, осуществляющим манипуляции предметов на расстоянии в трудных условиях, например, в глубоком вакууме, в радиоактивной или агрессивной среде, при высоком давлении.
Известен хобот манипулятора, образованный подвижно связанными между собой аналогичными звеньями, выполненными в виде полых ступенчатых валиков, ступени меньшего диаметра которых имеют выпуклую наружную сферическую поверхность, а ступени большего диаметра - вогнутую внутреннюю сферическую поверхность. При этом валики расположены так, что вогнутая поверхность одного охватывает выпуклую поверхность другого и соединены между собой с помощью силовых устройств (гидроцилиндров). Силовые устройства обеспечивают поворот валиков относительно друг друга (1).
Известное решение имеет сложную конструкцию, обусловленную наличием силовых устройств, что снижает его надежность. Кроме того, при эксплуатации манипулятора, имеющиеся в хоботе, пары трения выделяют продукты износа, которые загрязняют рабочую среду и отрицательно сказываются на качестве продукции.
В качестве прототипа взят гибкий манипулятор, содержащий диски с центральным отверстием для гибкого элемента, эластичные емкости в виде гибких трубок, последовательно огибающих диски с наружной и внутренней стороны, и расположенных симметричного относительно гибкого элемента (2).
Работает манипулятор следующим образом.
В одну из трубок подают давление, и гибкий манипулятор изгибается в противоположную от этой трубки сторону. Необходимый для обеспечения работоспособности гидронасос или компрессор усложняет конструкцию манипулятора, делает ее громоздкой.
Целью изобретения является повышение качества продукции за счет исключения из конструкции исполнительного органа пар трения, выделяющих при работе продукты износа.
Поставленная цель достигается тем, что в известном гибком исполнительном органе манипулятора, образованном подвижными элементами, шарнирно связанными между собой, согласно изобретению каждый шарнир выполнен в виде установленных крест-накрест плоских пружин, жестко прикрепленных к подвижным элементам, смежные шарниры сориентированы друг относительно друга взаимоперпендикулярно, а расположенные по торцам подвижные элементы соединены между собой гибкими тягами.
Отличительные от прототипа признаки являются существенными, так как каждый из них необходим, а все вместе с ограничительными достаточны для достижения поставленной цели. Так выполнение шарнира в виде установленных крест-накрест плоских пружин, жестко прикрепленных к подвижным элементам позволяет исключить из конструкции гибкого исполнительного органа манипулятора пары трения а, тем самым, устранить попадание в зону обслуживания продуктов износа.
Взаимоперпендикулярная ориентация смежных шарниров обеспечивает гибкость исполнительного органа в двух перпендикулярных плоскостях. Гибкие тяги, соединяющие между собой, расположенные по торцам исполнительного органа, подвижные элементы, необходимы для обеспечения работоспособности исполнительного органа, так как они передают изгибающие усилия на подвижные элементы.
Заявляемое решение отвечает критерию «существенные отличия», так как отличительные от прототипа признаки в исследованных аналогах не обнаружены.
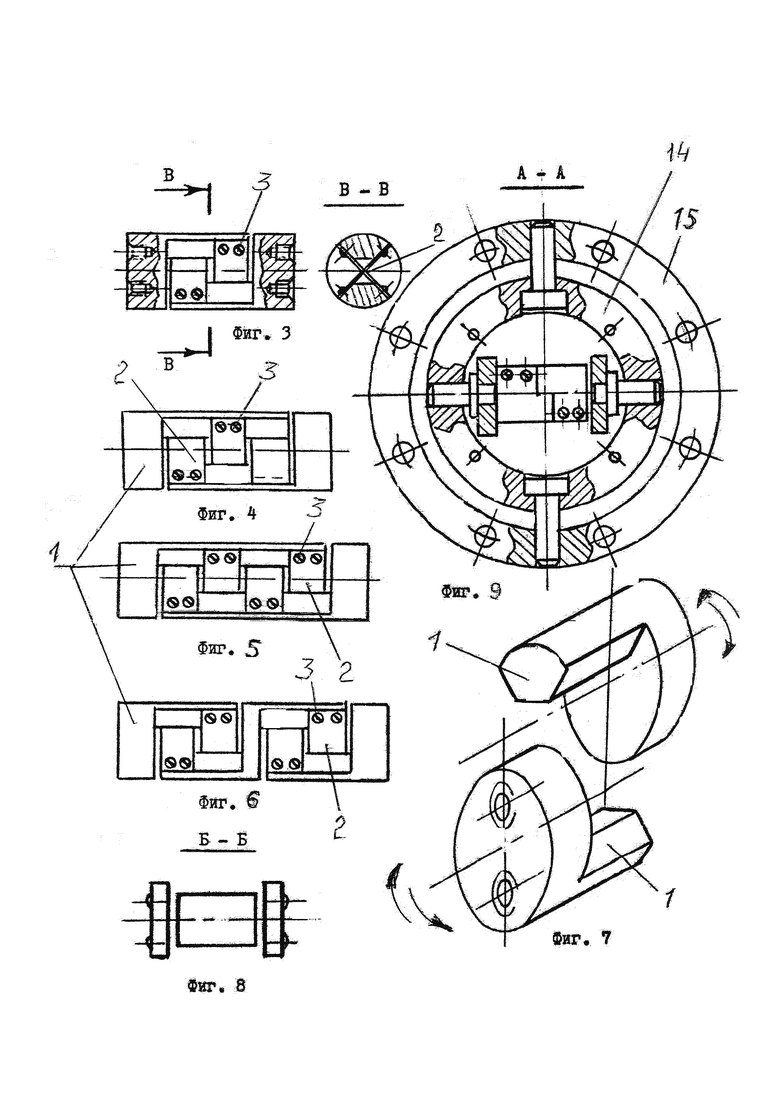
Сущность изобретения пояснена чертежами. Где на фиг. 1 изображен общий вид гибкого исполнительного органа, на фиг. 2, 3, 4, 7 варианты исполнения отдельного звена исполнительного органа, на фиг. 9 - разрез А-А фиг. 1, на фиг. 3-9 разрез Б-Б фиг. 1, разрез В-В фиг. 3.
Гибкий исполнительный орган манипулятора образован из однотипных звеньев, состоящих из подвижных элементов 1, шарнирно связанных между собой плоскими пружинами 2. В каждом шарнире пружины 2 установлены крест-накрест относительно друг друга и прикреплены к подвижным элементам 1 винтами 3. Смежные шарниры сориентированы взаимоперпендикулярно.
Крайний подвижный элемент той части гибкого исполнительного органа, которая находится в рабочей камере, изтотовлен с выступом 4. К выступу 4 привинчены плоские пружины 5, свободные концы которых прикреплены к наружным граням губок 6 захвата. Внутренние грани губок 6 соединены плоскими пружинными 7 со штоком 8, установленном на гибкой штанге 9. Другой конец гибкой штанги 9 жестко соединен со штоком 10 рукоятки управления 11, а сама штанга пропущена через сквозные отверстия 12, выполненные в подвижных элементах 1. Примыкающие к захвату рукоятка управления 11, подвижные элементы соединены между собой четырьмя гибкими тягами 13. Гибкий исполнительный орган манипулятора закреплен в проходке 14, установленной в стенке 15 камеры. По одну сторону от проходки 14 расположена ведущая часть гибкого исполнительного органа, соединенная с рукояткой управления 11. По другую сторону от проходки расположена ведомая часть гибкого исполнительного органа, соединенная с захватом.
Работает гибкий исполнительный орган следующим образом.
Подвижные элементы могут поворачиваться один относительно другого, изгибая при этом плоские пружины 2. Поворот подвижных элементов осуществляется с помощью гибких тяг 13. Наклон захвата в нужном направлении осуществляют отводом рукоятки управления 11. При этом гибкая тяга 13, расположенная со стороны, противоположной направлению отклонения рукоятки управления, натягивается, а противолежащая гибкая тяга ослабевает. Усилие натяжения гибкой тяги деформирует плоские пружины 2 соответствующих шарниров и подвижные элементы 1 ведомой части исполнительного органа поворачиваются один относительно другого. В результате этого захват наклоняется в сторону, противоположную направлению отклонения рукоятки управления. После снятия управляющих усилий плоские пружины 2 восстанавливают свою форму и возвращают захват в исходное положение.
Для осуществления захвата образца необходимо нажать на шток 10 рукоятки управления 11, который, перемещая гибкую штангу 9, шток 8 и плоские пружины 7, разводит губки 6, деформируя при этом плоские пружины 5. После подведения захвата к образцу снимают усилие со штока 10. Плоские пружины 5 и 7 восстанавливают свою форму и сводят губки 6, которые зажимают образец.
По сравнению с прототипом, заявляемый исполнительный, орган обеспечивает более чистые условия обработки образцов. Что обусловлено отсутствием в нем пар трения, которые при работе выделяют продукты износа, загрязняющие рабочую среду.
Кроме того, заявляемый исполнительный орган имеет более простую конструкцию, так как образован относительными узлами, состоящими из подвижных элементов и плоских пружин. Необходимо отметить также его работу в управлении, так как в отличие от прототипа он не содержит гидравлических механизмов.
Источники информации
1. Патент СССР№285668, М. кл. В25J 3 /00, 1971 г.
2. Авт. свид. СССР№1335455, М. кл. В25J 8/06, 1987 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| Захват манипулятора | 2018 |
|
RU2686167C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2705824C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| Манипулятор, работающий в герметизированном объёме | 2018 |
|
RU2691169C1 |
| Захват манипулятора | 2018 |
|
RU2697290C2 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
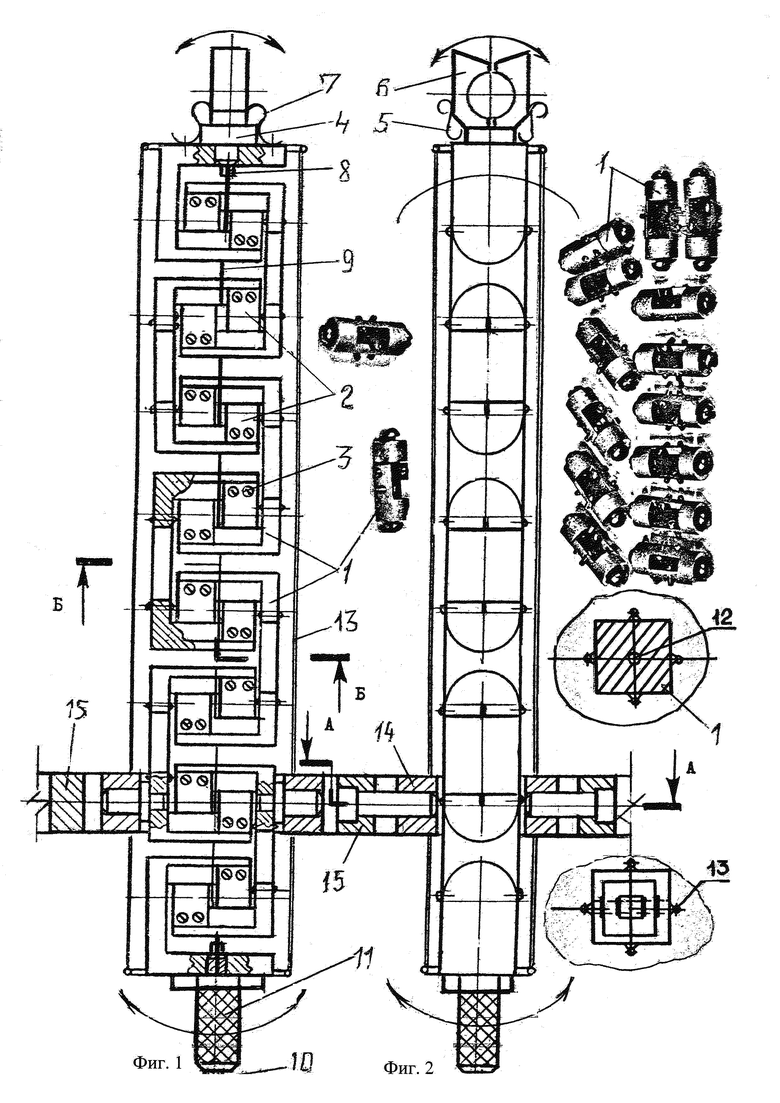
Изобретение относится к манипуляторам, осуществляющим манипуляции предметов на расстоянии в трудных условиях, например в глубоком вакууме, в радиоактивной или агрессивной среде, при высоком давлении. Гибкий исполнительный орган манипулятора образован подвижными элементами 1, соединенными между собой образующими шарниры с установленными крест-накрест плоскими пружинами 2. Смежные шарниры сориентированы относительно друг друга взаимоперпендикулярно. Торцевые подвижные элементы соединены гибкими тягами 13. С одного торца к крайнему подвижному элементу посредством плоских пружин 5 и 7 присоединены губки 6 захвата. С другого торца к крайнему подвижному элементу присоединена рукоятка управления 11. Технический результат заключается в повышении качества продукции. 9 ил.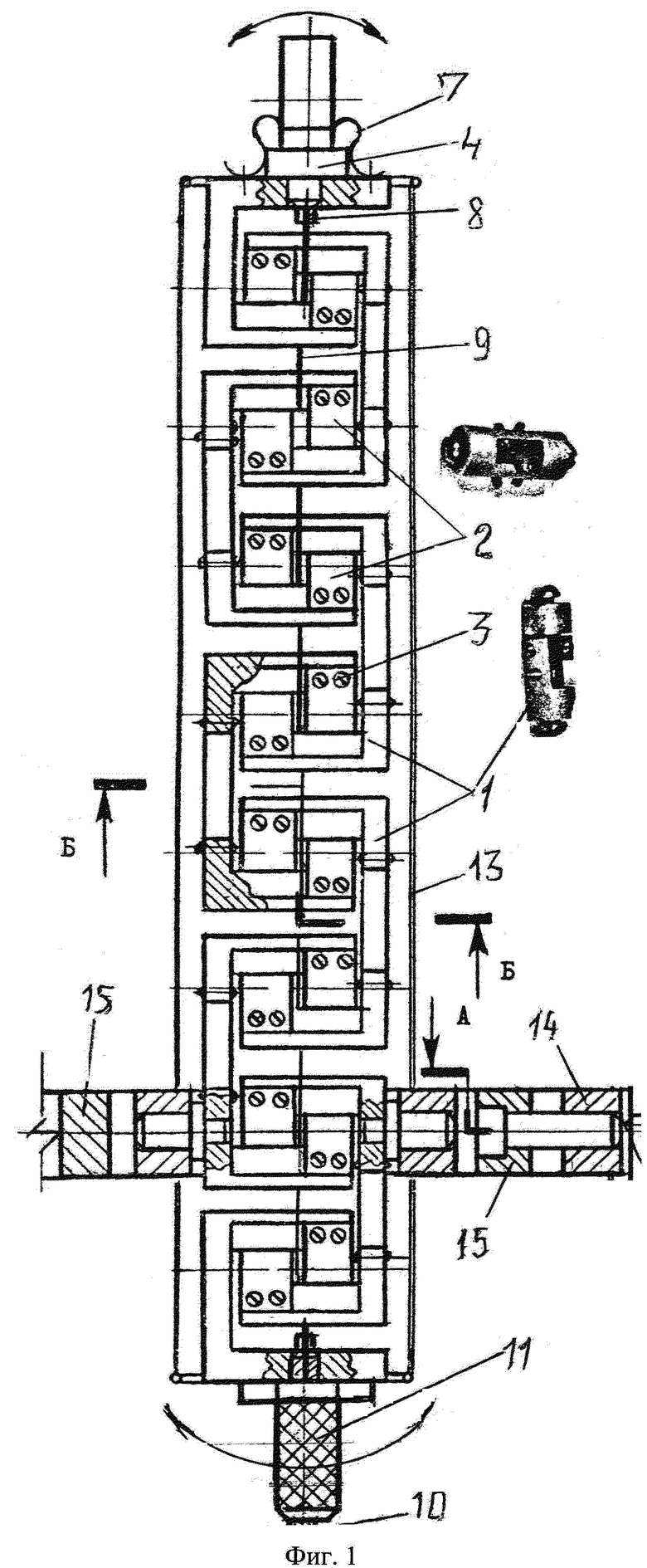
Гибкий исполнительный орган манипулятора, содержащий корпус с подвижными элементами, связанными между собой шарнирами, отличающийся тем, что каждый шарнир выполнен в виде установленных крест-накрест плоских пружин, жестко прикрепленных к подвижным элементам, причем смежные шарниры сориентированы перпендикулярно друг другу, а расположенные по торцам органа подвижные элементы соединены между собой гибкими тягами, причем каждая тяга и каждый шарнир снабжены размещенным между частями корпуса промежуточным элементом, имеющим S-образное сечение, и дополнительной парой пружин.
| Гибкий манипулятор | 1986 |
|
SU1335455A1 |
| Шарнирный механизм манипулятора | 1985 |
|
SU1268412A1 |
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156689C2 |
| US 6705177 B2, 16.03.2004. | |||

