IS.
21
00
о
а
2. Микроскоп по п. 1, отличающий с я тем, что он содержит оптическое устройство и две взаимно перпендикулярные шкалы, прозрачную и зеркальную, расположенные соответственно на стенке рабочей камеры и на манипуляторе, при этом шкала, расположенная
на манипуляторе, жестко связана с патроном-держателем объекта.
3. Микроскоп по п. 1, отличающийся тем, что он содержит визирное перекрестие на рентгенотелевизлонном преобразователе изображения и угломерную шкалу на рабочей камере.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рентгенотелевизионный измерительный микроскоп | 1971 |
|
SU397068A1 |
| Способ геометрических измерений внутри непрозрачных объектов | 1971 |
|
SU438907A1 |
| РЕНТГЕНОТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬНЫЙ МИКРОСКОП | 1970 |
|
SU278186A1 |
| Рентгенотелевизионный микроскоп | 1974 |
|
SU515977A1 |
| РЕНТГЕНОТЕЛЕВИЗИОННЫЙ МИКРОСКОП | 1972 |
|
SU360595A1 |
| РЕНТГЕНОТЕЛЕВИЗИОННЫЙ МИКРОСКОП | 1970 |
|
SU266267A1 |
| СПОСОБ ГЕОМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ ОБЪЕКТОВ, РАСПОЛОЖЕННЫХ ВНУТРИ НЕПРОЗРАЧНОЙ ОБОЛОЧКИ | 1973 |
|
SU409120A1 |
| Рентгенотелевизионный микроскоп | 1980 |
|
SU920479A1 |
| Рентгенотелевизионный томографический интроскоп | 1984 |
|
SU1179176A1 |
| Стереоскопический рентгенотелевизионный блок для стереоскопического микроскопа | 1975 |
|
SU579709A1 |
КрЕНТгеНОТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬНЫЙ МИКРОСКОП, обеспеченный полной радиационной защитой, содержащий источник рентгеновского излучения, рентгеночувствительный преобразователь изображения, рабочую камеру для размещения объекта исследования, и работающий с телевизионной системой замкнутого типа, отличающийся тем, что, с целью обеспечения проведения угловых и линейных измерений внутри непрозрачных объектов по двум взаимно перпендикулярным направлениям, возможности координатного перемещения просвечиваемого объекта по трем взаимно перпендикулярным направлениям и исключения проекционных и телевизионных погрешностей при измерениях, он имеет одну подвижную стенку рабочей камеры, часть которой может двигаться в направлении, взаимно перпендикулярном движению стенки, и манипулятор с патроном для закрепления объекта исследования, связанный с указанной частью стенки так, что может двигаться в направлении, перпендикулярном плоскости указанной стенки.
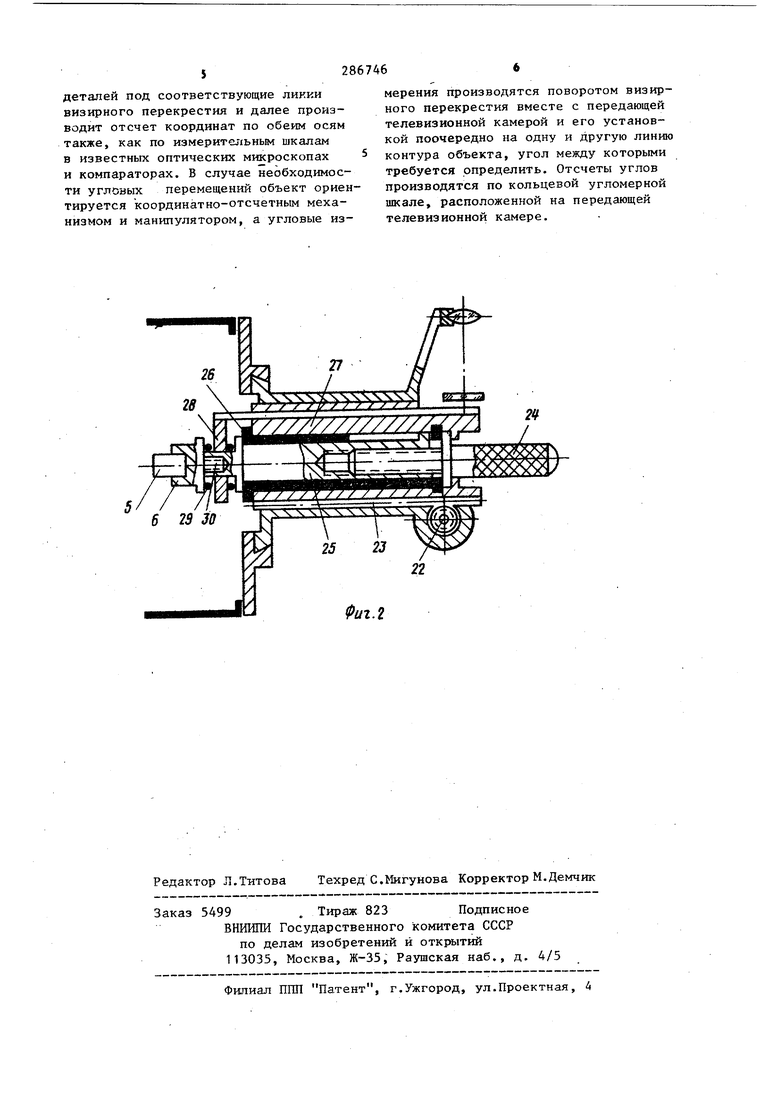
Изобретение относится к устройства .контрольно-измерительной техники, а именно к рентгенотелевизионным микроскопам, предназначенным для измерения расстояний между деталями внутренней структуры непрозрачных объектов при их непосредственном наблюдении в увеличенном виде на телевизионном экране Известные рентгенотелевизионные мик роскопы имеют полную радиационную защиту источника рентгеновского излучения и рабочей камеры, служащей для размещения исследуемого объекта, за положением которого наблюдают через специальное -защитное окно в рабочей камере. Объект размещают на пути пуч ка рентгеновских лучей перед мишенью рентгенотелевизионного преобразовате ля. Возникающие в преобразователе видеосигналы подаются на телевизионный монитор. Указанные микроскопы имеют приспособления для перемещения исследуемого объекта при просвечивании относигельно мишени рентгенотеле визионного преобразователя и источни ка рентгеновских лучей. Однако они не позволяют при просвечивании точно измерять размеры и расстояния внутри непрозрачных объектов. Это связано с тем, что при наблюдении на телевизионном экране в увеличенном виде картин внутренней структуры непрозрачных объектов возникает ряд погрешностей, связанньгх .в основном с телевизионными искажени ями размеров изображения и с проекционными искажениями -размеров в самом теневом рентгеновском изображени обусловленными разными расстояними деталей объекта от мишени рентгеночувствительного преобразователя. Для исключения телевизионных и проекционных искажений визирование контуров деталей в микроскопе производится относительно перекрестия, расположенного точно на оси пучка рентгеновских лучей, .а изображение самого перекрестия вводится в телевизионный сигнал вместе с сигналами, получаемыми от изображения просвечиваемого объекта. При этом перекрестие жестко связано с мишенью рентгенотелевизионного преобразователя. Для точного подведения контуров той или иной внутренней детали под линии перекрестия применяется координатноотсчетная система, которая управляет перемещениями объекта, не нарушая полной радиационной защиты микроскопа. Координатно-отсчетная система включает в себя подвижную стенку рабочей камеры, плоскую подвижную плиту, закрыванлцую окно в подв$гжной стенке рабочей камеры, и манипулятор, перемещающийся внутрь рабочей камеры через отверстие в подвижной плите. Точные отсчеты перемещения объекта по двум взаимно перпендикулярным координатам, лежащим в плоскости, перпендикулярной оси просвечивания, производятся по двум шкалам с помощью одного оптического устройства, сфокусированного на область пересег чения двух шкал. Для обеспечения угловых измерений в микроскопе используется передающая камера с рентгенотелевизионным преобразователем, вращающаяся вокруг своей оси, а для осуществления фокусировки перемещающаяся вдоль этой оси. При этом ось поворота передающей камеры, центр мищени рентгёнотелевизионного преобразователя и центр визирного перекрестия совпадают с осью пучка рентгеновских лучей, а отсчет координат угловых перемещений производится по угломерному устройству. Важным элементом координатно-отсчетной системы микроскопа, повышающим производительность и точность отсчетов по одной координате, является отсчетная шкала, расположенная в пазу манипулятора и свя занная одним концом с патроном манипулятора, в котором закрепляется объект. При тонких перемещениях патрона, например, с помощью винтовой пары, отсчетная шкала скользит в пазу манипулятора, а при грубых перемещениях перемещается вместе с манипулятором, но благодаря такому кре лению шкалы в обоих случаях координа ты отсчитываемых перемещений объектов не зависят от вида перемещения. Описываемый микроскоп изображен на фиг. 1 и 2. Внутри рабочей камеры 1 на оси пучка рентгеновских лучей 2 между ис точником 3 рентгеновского излучения рентгеночувствительной передающей трубкой 4 размещается просвечиваемый объект 5 в патроне 6 манипулятора 7 Координатно-отсчетная система состо ит из подвижной стенки 8 рабочей камеры, перемещающейся параллельно оси просвечивания в пазах направляющих 9 с помощью ручной подачи или электрического привода. Длина стенки 8 больше длины перекрываемого ею окна на величину ее перемещения. Под вижная стенка имеет прямоугольное окно 10, перекрытое подвижной крышкой 11, перемещающейся в пазах в на- правляюш,гх 12 с помощью соответствую щего, например, винтового механиз-ма Длина сдвига крьш1ки 11 больше длины окна 10 на величину ее перемещения. Подвижная крышка имеет посередине отверстие 13. Через это отверстие и окно 10 стенки внутрь рабочей каме ры перемещается манипулятор 7, несущий на одном конце патрон 6, а на другом снаружи рабочей камеры - ряд рукояток для изменения ориентировки просвечиваемого объекта 5 относитель но оси просвечивания. Координаты перемещения объекта отсчитываются оптическим устройством 14, закрепленным на подвижной крьшке 11, по двум шкалам: зеркальной 15, расположенный в продольном, пазу корпуса манипулятора 7, и прозрачной 16, неподвижно закрепленной на подвижной стенке. Для измерения расстояния между двумя элементами внутри непрозрачного объекта используется перекрестие 17, расположенное вблизи м шIeни передающей телевизионной трубки, выполненное из непрозрачного для рентгеновских лучей мат&риала, например из вольфрамовой проволоки. Возможно также применять перекрестие, нанесенное на мишень рентгеночувствительной передающей телевизионной трубки. Передающая камера 18, содержащая рентгеночувствительную передающую телевизионную трубку 4, фокусирующую и отклоняющую системы с предварительным усилителем, заключена в кругльй цилиндрический корпус 19, причем центр мютени передающей трубки близко совпадает с осью цилиндрического корпуса. При угловых отсчетах передающая камера поворачивается в опоре 20 вместе с цилиндрическим корпусом, а отсчеты углом производятся на его кольцевой градусной шкале 21, размещенной на цилиндрическом корпусе. Грубое перемещение объекта вдоль оси манипулятора (перпендикулярно оси просвечивания) осуществляется с помощью шестерни 22 и сцепленной с ней зубчатой рейки 23 (см, фиг. 2), тонкое перемещение - с помощью винта 24 и ходовой гайки 25, Вращение объекта вместе с манипулятором происходит за счет поворота трубы 26 в расточке корпуса 27 манипулятора. Для того, чтобы перемещение объекта, закрепленного в патроне, точно соответствовало перемещению шкалы 15, последняя жестко связана с шайбой 28, которая при повороте патрона остается неподвижной, а для устранения продольного люфта зеркальной шкалы применены два упорных шарикоподшипника 29, размещенных на шайбе 30 и зажатых в осевом направлении патроном. При работе на рентгенотелевизионном микроскопе оператор ориентирует манипулятором просвечиваемый объект в нужное для измерения положение в пространстве, наблюдая его действительное положение через окно в рабочей камере и детали его внутренней структуры на телевизионном экране. Затем оператор, ориентируясь на телевизионное изображение, с помощью координатно-отсчетного механизма подводит контуры наблюдаемых на экране
деталей под соответствующие ликки визирного перекрестия и далее производит отсчет координат по обеим осям также, как по измерительным шкалам в известных оптических микроскопах и компараторах. В случае необходимости угловых перемещений объект ориентируется коордннатно-отсчетным механизмом и манипулятором, а угловые измерения производятся поворотом визирного перекрестия вместе с передающей телевизионной камерой и его установкой поочередно на одну и другую линию контура объекта, угол между которыми требуется определить. Отсчеты углов производятся по кольцевой угломерной шкале, расположенной на передающей телевизионной камере.
22
Фиг.г
