00 со
Од 00
| название | год | авторы | номер документа |
|---|---|---|---|
| Рентгенотелевизионный измерительный микроскоп | 1969 |
|
SU286746A1 |
| Рентгенотелевизионный микроскоп | 1974 |
|
SU515977A1 |
| РЕНТГЕНОТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬНЫЙ МИКРОСКОП | 1970 |
|
SU278186A1 |
| РЕНТГЕНОТЕЛЕВИЗИОННЫЙ МИКРОСКОП | 1970 |
|
SU266267A1 |
| РЕНТГЕНОТЕЛЕВИЗИОННЫЙ МИКРОСКОП | 1972 |
|
SU360595A1 |
| Способ геометрических измерений внутри непрозрачных объектов | 1971 |
|
SU438907A1 |
| СПОСОБ ГЕОМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ ОБЪЕКТОВ, РАСПОЛОЖЕННЫХ ВНУТРИ НЕПРОЗРАЧНОЙ ОБОЛОЧКИ | 1973 |
|
SU409120A1 |
| Рентгенотелевизионный микроскоп | 1980 |
|
SU920479A1 |
| Рентгенотелевизионный томографический интроскоп | 1984 |
|
SU1179176A1 |
| Стереоскопический рентгенотелевизионный блок для стереоскопического микроскопа | 1975 |
|
SU579709A1 |


РЕНТГЕНОТЕЛЕВИЗИОННЫЙ И3№- РИТЕЛЬНЫЙ МИКРОСКОП, содержащий обеспеченные полной радиационной защитой источник рентгеновского излучения, рабочую камеру с координатно-отсчет- ным устройством и манипулятором,передающую камеру с рентгеночувствитель- ным телевизионным преобразователем, отличающийся тем, что, с целью повышения производительности контроля скрытых дефектов в любых оптимально выбранных направлениях просвечивания, координатно-отсчетное устройство смонтировано на рабочей камере с помощью поворотной рамы, которая установлена на кольцевом подшипнике, ,а манипулятор установлен в подвижной плите координатно-отсчет- ного устройства.
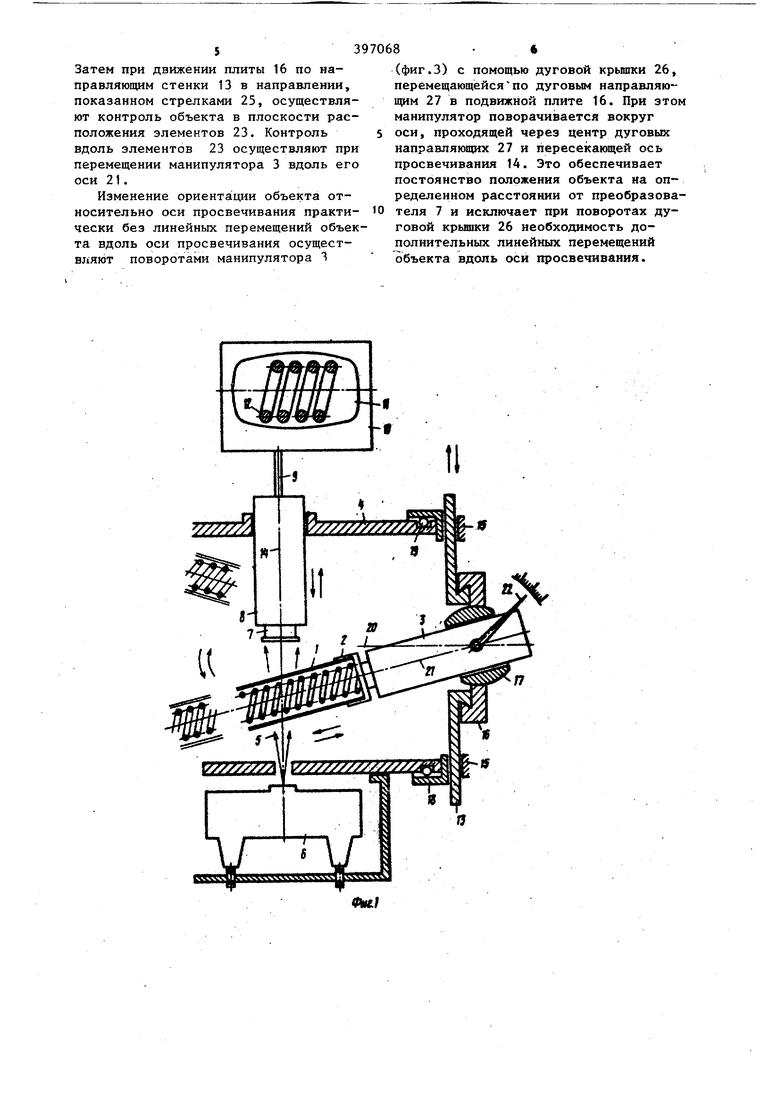
г Изобретение относится к контроль но-измерительной технике, в частности к рентгенотелевизионным микро скопам, предназначенным для линейных и угловых измерений внутри непрозрачных объектов. Известны оптические устройства, в которых возможно изменение угла наклона оптического визирного канал относительно плоскости координатных перемещений измеряемого объекта путем совместного поворота оптическог визирного микроскопа и осветителя с конденсором вокруг одной оси. Однако рентгенотелевизионный микроскоп по такому принципу не мож быть конструктивно реализован из-за громоздкости соответствующих узлов (источник рентгеновского излучения, передающая камера), Известен рентгенотелевизионный микроскоп, в котором объект, закреп ленный в патроне манипулятора, вращается вокруг нескольких взаимно перпендикулярных осей и может перемещаться вдоль этих осей. Однако такая конструкция, обеспе чивая требуемую ориентировку объект относительно оси просвечивания, не позволяет перемещать и просматривать контролируемый объект, например, при его поступательном перемещении под заданным углом к оси просвечивания, так как ориентационные повороты не связаны и не изменяют направлений поступательных перемещений. Цель изобретения - обеспечение возможности заданной пространственной ориентировки контролируемых объектов и поступательного перемещения объекта в плоскости заданной ориентировки. Это достигается тем, что координатно-отсчетное устройство предлагаемого рентгенотелевизионного микроскопа вьтолнено с возможностью поворота вокруг оси, перпендикулярной к оси просвечивания, а манипуля тор закреплен так, что может поворачиваться вокруг оси, перпендикулярной к оси поворота всего координатно-отсчетного устройства. Таким образом осуществлен перехо от известной ранее регулировки ориентации объекта путем его поворотов в патроне манипулятора к регулируемым поворотам всей координатной сис темы и манипулятора. При этом появляется ряд новых технических преимуществ и возможлостей, открывающих новые области применения рентгенотелевизионного микроскопа. С помощью рентгенотелевизионного микроскопа можно осуществлять угло-вые измерения на больщой площади плоского объекта путем изменения его ориентации в пространстве, обнаруживать с высокой производительностью и эффективностью скрытые дефекты в печатных многослойных платах; производить контроль периодических линейных п уостранственных структур, например, спиралей ламп бегущей волны; в сочетании с известными устройствами для поворота просвечиваемого объекта вокруг собственной оси производить линейные и угловые измерения, а также дефектоскопию всей площади стенок цилиндрических полых объектов, имеющих внутреннюю периодическую структуру, дисков, содержащих элементы периодической структуры, например турбинных колес в зоне расположения лопаток. При этом максимальную техническую эффективность, а также максимальную производительность обеспечивает именно сочетание устройств, позволяющих изменять в широких пределах ориентировку в пространстве линейных координатных перемещений просвечиваемого объекта, так что любой произвольно ориентированный ряд элементов линейной или плоскостной периодической структуры, распределенных внутри непрозрачных объектов, может быть выставлен под оптимальным углом к оси просвечивания и последовательно пропущен через зону просвечивания с сохранением на всей длине просмотра заданной оптимальной ориентировки. Использование предлагаемого рентгенотелевизионного микроскопа позволяет, с одной стороны, значительно расширить диапазон областей применения такого рода приборов, обладающих, в отличие от оптических микроскопов, значительно большей глубиной резкости, с другой стороны, предлагаемая конструкция позволяет обеспечить массовый высокопроизводительный контроль скрытых дефектов и нарушений геометрии в любых оптимально выб3ранных направлениях просвечивания однотипньпс малогабаритных изделий, закрепленных в строго фиксированных положениях на плоских панелях, в отличие от радиографии (на пленку). При этом в сомнительных случаях имеется возможность просмотра отдельных элементов под разными углами просвечивания. Такой контроль необходим, например, в массовом производстве полупроводниковых приборов, твердых и интегральных схем, катодных узлов электровакуумных приборов, которые можно контролировать в плоской герметичной таре. Появляется возможность полной автоматизации контроля путем npoi- раммного управления всей координатно-ориентационной системой и пос ледовательного автоматического анализа изображений на основе известных принципов телевизионной автоматики . На фиг.1 схематически изображен предлагаемый рентгенотелевизионный микроскоп; на фиг.2 - то же, общий вид в аксонометрии} на фиг.З микроскоп в процессе контроля, для одного из случаев измерения. Контролируемый объект 1, закрепленный в патроне 2 манипулятора 3, располагают внутри рабочей камеры 4 на пути пучка 5 рентгеновских лучей выходящего из источника 6 и направленного на мишень рентгеночувствительного преобразователя 7, размеще ного в передаюп;ей камере 8. Кабелем 9 передающая камера соединена с телевизионным монитором 10, на эк ране 11 которого, наблюдают увеличенное изображение 12 внутренней структуры объекта 1 . Координатно-отсчетное устройство микроскопа содержит подвижную стенку 13 рабочей камеры 4, перемещающуюся параллельно оси 14 просвечива ния в направляющих 15; подвижную пл ту 16, которая перемещается перпендикулярно к направлению перемещения стенки 13; манипулятор 3, проходящи внутрь камеры 4 через цилиндрически поворотный сухарь 17, установленньй на подвижной плите 16. Манипулятор служит для закрепления объекта 1. С помощью цилиндрического поворотно го сухаря 17 манипулятор может пово рачиваться на заданные углы относительно оси 14 просвечивания. Все ко ординатно-отсчетное устройство смон 4 тировано на поворотной раме 1-8 и вращается па подшипниках 19 покруг оси 20, перпендикулярной к оси 14 просвечивания. В зависимости от конструкции обг1екта 1 его ориентация по отношению к направлению пучка 5 рентгеновских лучей может быть различной. В случае контроля геометрической точности изготовления периодических линейных пространственных структур, заключенных в непрозрачную оболочку, объект (фиг.1) устанавливают в рентгенотелевизионном микроскопе на оси 14 просвечивания под таким углом к ней, что изображения последовательных элементов структуры образуют рисунок, состоящий из чередующихся полос и зазоров. Путем соответствующей ориентации структуры за счет плавного наклона оси 21 манипулятора 3, который вместе с цилиндрическим сухарем 17 поворачивается относительно плиты 16,достигают такого положения, чтобы величина наблюдаемых на экране 11 монитора 10 изображений светлых промежутков бьша соизмерима с допусками на отклонения от периодичности контролируемой структуры. Эти отклонения вьивляются с повышенной точностью, что позволяет на основе непосредственного наблюдения на телевизионном экране 11 ширины и длины светлых промежутков между элементами контролируемой структуры без специальных измерений сделать заключение о точности изготовления и качестве детали. Угол наклона оси 21 манипулятора 3, который отсчитывается с помощью углового отсчетного устройства 22, состоящего, например, из угломерной шкалы и стрелки, служит мерой взаимозаменяемости и повторяемости периодических структур и является еще одним критерием качества их изготовления. Если контролю подлежит объект, внутри которого имеются элементы 23 (фиг.2), расположенные в разных плоскостях и перекрывающие один другой, то контроль ведется следующим образом. Объект устанавливают в положение, когда элементы 23, распо ложенные в разных плоскостях, не перекрывают один другой. Это достигается общим поворотом координатноотсчетного устройства, угол поворота измеряк т по отсчетному устройству 24.
Затем при движении плиты 16 по направляющим стенки 13 в направлении, показанном стрелками 25, осуществляют контроль объекта в плоскости расположения элементов 23. Контроль вдоль элементов 23 осуществляют при перемещении манипулятора 3 вдоль его оси 21.
Изменение ориента ции объекта относительно оси просвечивания практически без линейных перемещений объекта вдоль оси просвечивания осуществляют поворотами манипулятора Я
(фиг.З) с помощью дуговой крьшгки 26, перемещающейсяпо дуговым направляющим 27 в подвижной плите 16. При этом манипулятор поворачивается вокруг оси, проходящей через центр дуговых направляющих 27 и пересекающей ось просвечивания 14. Это обеспечивает постоянство положения объекта на определенном расстоянии от преобразователя 7 и исключает при поворотах дуговой крьш1ки 26 необходимость дополнительных линейных перемещений объекта вдоль оси просвечивания.
Фиг. г
/
.3
