Настоящее изобретение относится к системам регулирования технологически.х процессов, где применяются пневматические исполни1ельные ме.ханизмы.
Вышеуказанные системы регулирования обычно оснаи|аются приборами, сигнализирующими об аварийном состоянии некоторых параметров процесса, а также индикаторами состояния оборудования.
Предлагаемый индикатор позволяет получить информацию о состоянии одного из важнейших видов оборудования любой системы регулирования - о пневматическом исполнительном ме.ханизме (ПИМ).
Индикатор отказа исполнительного механизма содержит узел измерения сигнала, иоступаюшего в контролируемое устройство, выполненный в виде трубки Бурдона и связанный через рычаг с системой контактов, отличается тем, что он содержит соосный нервому второй рычаг, шарнирно связанный со штоком контролируемого исполнительного механизма, причем его контакты образуют общую систему с контактами первого рычага.
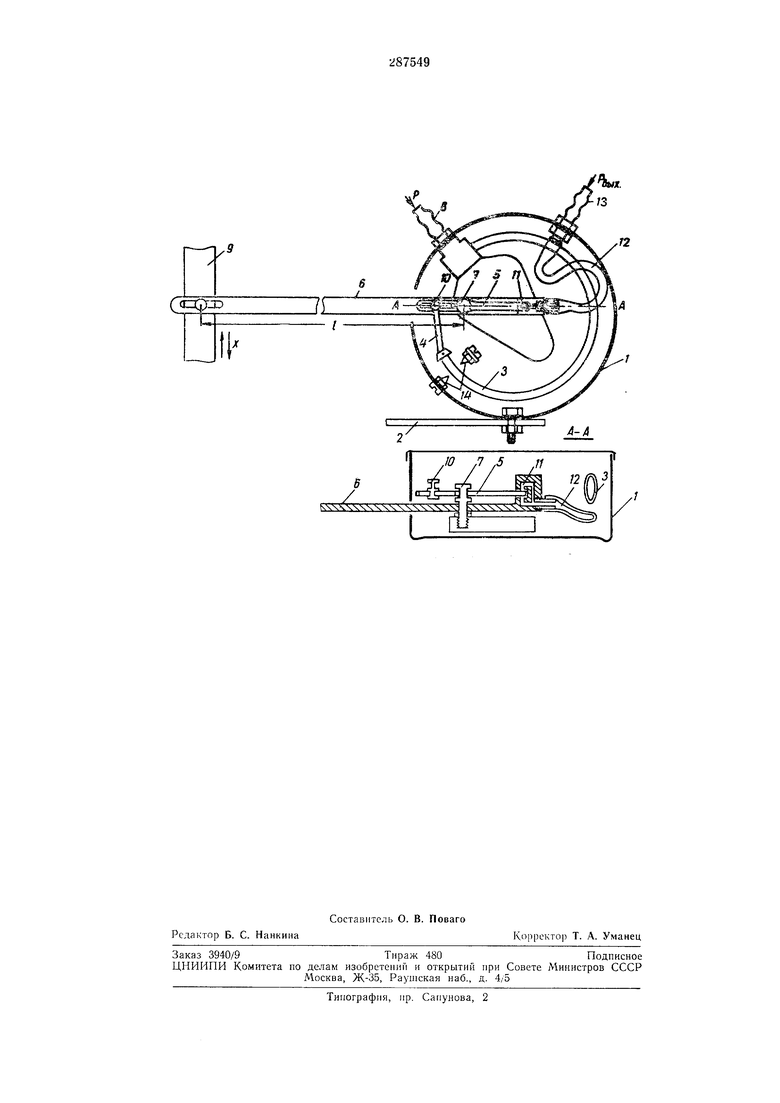
Схема описываемого индикатора представлена на чертеже.
рычаги 5 и 6, сидящие на одной оси 7. Трубка 3 с тягой 4 и рычагом 5 предназначены для преобразования командного сигнала - давления воздуха Р, поступающего с регулятора в nPiM, в угол поворота ф рычага 5:
ф &1(/-Яс),(1)
где ф - угол поворота рычага 5; Р - давление командного воздуха; k - постоянный коэффициент;
Яс-4-(..
где РО - PI диапазон изменения командного давления ()Командный сигнал Р, поступающий от регулирующего устройства в исполнительный механизм, поступает в трубку Бурдона индикатора через штуцер 8. Шток 9 иснолнительного механизма под воздействием командного давления Р совершает поступательное перемещение X. Рычаг 6 предназначен для преобразования
линейного перемещения X штока 9 ПИМ в угловое перемещение ф1 рычага 6. положении штока (Х ::--Х„,,Л, где - максимальное перемещение штока, угол ф1 0. Углы ф и ф| отсчитываются от положения рычага 5 при . Для нормальной работы индикатора иеобходнмо, чтобы зависимость (2) была линейной с точностью до 1-2%. Это имеет место при , что ириводит к условию J m.i X j где / - расстояние от штока 9 до оси 7. Условие (3) должно быть выдержано при изготовлеиии индикатора, тогда зависимость (2) принимает вид: При настройке индпкатора перемещеннем вдоль рычага 5 осн 10, соединяющей тягу 4 с рычагом 5, необходпмо добпться одииакового хода рычагов 5 и 6 при иормальной работе ПИМ, т. е. установить /(. Тогда, используя формулы (1) п (4), имеем: К(Р-Рс)+ Y- - -Известно, что для обеспечепия линейной зависимости перемещением штока ПИМ Xi п давлением Р необходимо, чтобы с, К(Р-Рс) + л... Однако в реальных условиях зависимость X f(P) (7) из-за трения и другпх причин лищь нрнближенно совпадает с требуемой (6). Под отказом ПИМ здесь понпмается расхождение зависимостей (6) и (7) более чем иа заданную величину Е, т.е. |;Г1- | |/((Р-Яс| - тг,х-л; Е. (8) Применив вышеуказанное рассуждение к описываемой конструкции, отказом ПИЛ1 можно считать событие, при котором |ф-ф11 -, то есть при отказе ПИМ рычаги 5 10 15 20 25 30 40 45 50 5и 6 измерительного узла расходятся на угол, больший заданного значения. Для сигнализации об отказе ПИМ в состав индикатора входит сигнальный узел, который для индикатора с пневмовыходом (вариант, представленный на чертеже) состоит из пневмосопел 11, укрепленных иа конце рычага 6, и гибкой резиновой трубки 12, соедипяющей сопла со штуцером 13. От штуцера 13 пневмолиния идет ко вторичному сигнализатору отказа ПИМ (например, к пневмоэлектрическому реле). Рычаг 5 является заслонкой для пневмосопел. При нормальной работе ПИМ заслонка закрывает сопла, и давление в пневмолинии поддерживается. В случае отказа ПИМ заслонка открывает сопла, и давление Явых в пневмолинни падает, что служит сигиалом 06отказе ПИМ. Сигпал падення давления может также служить командой для переключения на резервный исполиительный орган. Для индикатора с электрпческим выходом в сигиальном узле пиевмосопла замеияются электрическими контактами. В состав иидикатора входят также укрепленные на корпусе / ограничители 14, ограничиваюшие перемещение рычага 5 после того, как щток ПИМ придет в одно из своих крайних полол ений. Настройка индикатора для работы с ПИМ, имеющим разные максимальные перемещения штока, производится путем изменения расстояния / от штока 9 до оси 7. Предмет изобретения Индикатор отказа работы устройства, например пиевматического исполнительного механизма, содержащий узел измерения сигнала, постунающего в контролируемое устройство, вынолненный в виде трубки Бурдона и связанный через рычаг с системой контактов, отличающийся тем, что, с целью обнаружеипя отказа пиевматпческого исполнительного механизма, ои содержит соосный первому второй рычаг, щарнирио связанный со штоком контролируемого исполнительного механизма, причем его контакты образуют общую систему с контактами первого рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИХ МЕМБРАННО-ПРУЖИННЫХ КЛАПАНОВ | 1990 |
|
RU2015525C1 |
| Устройство для стабилизации нагрузки на долото | 1984 |
|
SU1162954A1 |
| Система заправки | 1976 |
|
SU848389A1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ | 2008 |
|
RU2379556C1 |
| АВТОМАТИЧЕСКАЯ СЕТКОПРАВКА | 1973 |
|
SU381719A1 |
| Сифонный дозатор | 1990 |
|
SU1774177A1 |
| Устройство для стабилизации нагрузки на долото | 1990 |
|
SU1761946A2 |
| Пневматическое вычислительное устройство | 1975 |
|
SU625210A1 |
| ПНЕВМАТИЧЕСКИЙ ДОЗАТОР С ОТМЕРИВАНИЕМ ДОЗЫ ПО УРОВНЮ ЖИДКОСТИ В ТАРЕ | 2020 |
|
RU2754139C1 |
| Регулятор давления | 1977 |
|
SU744492A1 |