(54) ПНЕВМАТИЧЕСКОЕ Ы ГЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический позиционный регулятор | 1979 |
|
SU903806A1 |
| Автоматический регулятор ленточных тормозов лебедок | 1958 |
|
SU122459A1 |
| Пневматический преобразователь усилия | 1981 |
|
SU976309A1 |
| Преобразователь уровня | 1983 |
|
SU1129497A1 |
| Автоматический плотномер | 1975 |
|
SU565231A1 |
| Пневматический компенсационный манометр | 1978 |
|
SU1002857A1 |
| Пневматический измерительный преобразователь теплотехнического параметра | 1973 |
|
SU508123A1 |
| ПНЕВМАТИЧЕСКИЙ КОМПЕНСАЦИОННЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ МАНОМЕТР | 1967 |
|
SU191853A1 |
| Пневматический регистрирующий прибор | 1985 |
|
SU1276908A2 |
| СИСТЕМА АКТИВНОГО КОНТРОЛЯ ДЛЯ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ И СПОСОБ ЕЁ РАБОТЫ | 2020 |
|
RU2772478C1 |
Изобретение относится к области автоматизации .производственных процессов и приборостроительной промь1шленности, а именно к пневматическим вычислительным устройствам..
Наиболее близким к изобретению по технической сущности является пневматическое вышслительное устройство, содержащее измерительные блоки компенсационного типа, каждый из которых состоит из приемника входного сигнала, связанного через коромысло с индикатором кс пенсадии сопло-заслонка и с пружиной, другой конец KOTOpcrit соединен с р ычагом исполнительного механизма, связанного с соплом индикатора компенсации Llj.
Однако функциональные возможности этих устройств ограничены. Например;С их помощью невозможно найти частное переменных величин. У предлагаемого уст ройства функциональных возможностей больше чем у известных, так как оно опрделяет и частное переменных.
Целью изобретения является расширен ние области применения устройства.
Достигается это тем, что в него введены преобразователь перемешёния в пневматический сигнал; и ролики, причем пружины обоих измерительных блоков коМ пенсационного типа соединены меяуцг собой при помощи нитн, закрепленной на первом ролике, установленном на рычаге исполнительного механизма первого измерительного к и«гаенсааионног6 блока, а один из концов прзпвищы второго измервительного компенсадвонного блока связан с коромыслом при помощи нити, закрепленной на втором ролнке, размещенном на рычаге исполнительного механизма второго компенсационного измерительного блока, кинематически связанном с преобразователем перемещения в пневматический сигнал.
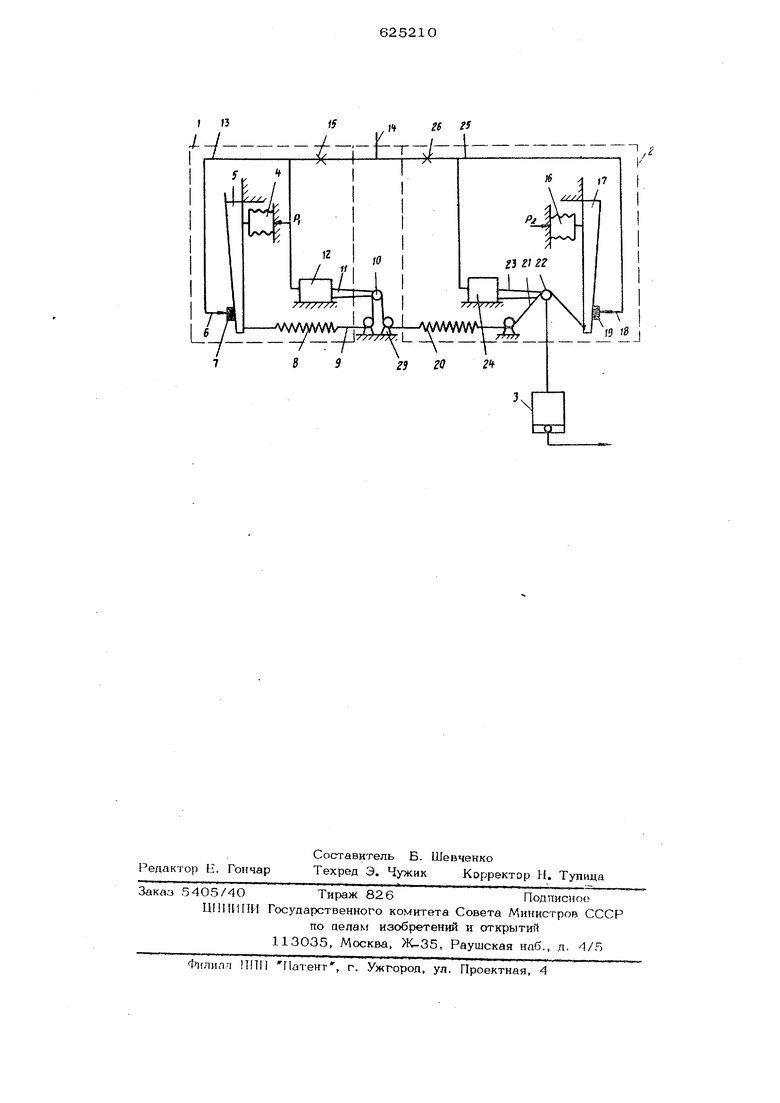
На чертеже дана схема устройств.
Оно состоит их аналогичных по типу измерительных блоков 1, 2 компенсацирнного типа и преобразователя перемещения в пневматический сигнал 3. Измерительный блок 1 состоит из приемника 4 входного сигнала Р| , связанного через хоромысло 5 с индикатором компенсации, в виде пары ciotma б и заслонки 7, и с пружиной 8, соединенной другим концом с нитью 9, пропущенной через первый ро лик 10,установленный на рычаге 11 нсполНЕгтельного механизма 12, сообщенного СВОИМ, входом с соплом 6с помощью пневмолинин 13, запитываемой от линни питания 14 через дроссель 15. Измерительный блок 2 так же состоит из прием ника 16 второго входного сигнала Рл , связанного через коромысло 17 с индика тором компенсации в виде пары сопла 18 и заслонки 19 и пружиной 2О с помощью нити 21, пропущенной через второй ролик 22, укрепленный на рычаге 23 соединенный с преобразователем перемещения в пневматический Сигнал 3, исполнительного механизма 24, соединенного своим входом с соплом 18с помощью пневмолинии 25, запитываемой так же от лиюш питания 14 через дроссель 26, Другой. конец пружины 20 соединен с помощью нити 9, пропущенной через ролик 1О. Устройство работает следующим образом. Сила, развиваемая приемником 4 по действием входного сигнала величиной Р , компенсируется натягом пружины 8, образуемым рычажным исполнительны механизмом 12, управляемым индикатором компенсации, сопла 6 и заслонки 7. Этот натяг равен натягу в пружине 20, и в нити 21, образующей с коромыслом 17, а следовательно с направлением силы, развиваемой приемником 16 под дей ствием второго входного сигнала величиной Ря переменный угол, благодаря дейс вию рычага исполнительного механизма 24, Эта величина угла зависит от полож ния рычага 23 и входных сигналов следукяцим образом: P2,/Pi°smai где PJ и Prt соответственно первый и второй входные сигналы. ai - угол между натягом в нити 21 у коромысла 17 и силой, ресви.. ваемой в приемнике входного сигнала 1 в, Величина угла преобразуется с помощью преобразователя 3 в выходной пнеь . матический сигнал. Предложенное устрой ство кроме преобразования частного двух пневмосигналов может сформировать выходкой сигнал в виде синуса или косинуса отношения двух переменны) Формула изобретения Пневматическое вычислительное устройство, содержащее измерительные блоки компенсационного типа, каждый из которых состоит из приемника входного сигнала, связанного через коромысло с индикатором компенсации сопло-заслонка и с пружиной, другой конец которой сое. динен с рычагом исполнительного механизма, связанного с соплом индикатора компенсации, отличающееся I, тем, что, с целью расщирения функциональных возможностей устройства, в него введены преобразователь перемещения в пневматический сигнал и ролики, гфичем пружины обоих измерительных блоков компенсационного типа соединены между собой при помощи нити, закрепленной на первом ролике, установленном на рычаге исполнительного .механизма первого измерительного компенсационного блока, а один из концов пружины второго измерительного компенсационного блока связан с коромыслом при помощи нити, закрепленной на втором ролике, размещенном на рычаге исполнительного механизма второго компенсационного измерительного блока, кинематически связанном с преобразователем перемещения в пневматический сигнал. Источники информации, принятые во внимание при экспертизе: 1. Сб, под рец. Кошарского Б. Д. Автоматические приборы, регуляторы и управляющие машины . Л., 1968, с. 468-470.
IS
) П
