Изобретение предназначено для использования в сейсмической разведке нефтяных и газовых месторождений.
При обработке сейсморазведочной информации, например, методом ОГТ, колебания, регистрируемые на различных трассах, складываются, после того как в них введены кинематические поправки. При этом необходимо обеспечить синфазное суммирование полезных волн, для чего нужно знать кинематические поправки очень точно - не хуже 3- 5 мсек. Если учесть, что сами поправки достигают 500 мсек н более, то ясно, что относительная точность должна быть не хуже 0,5- 1%. Величина поправки определяется расстоянием между пунктами взрыва и приема и законом изменепия скорости распространения упругих волн с глубиной. В первом приближении поправка обратно пропорциональна квадрату скорости, откуда следует, что скорость надо знать с точностью 0,25-0,5%. Такой точности величины скоростного разреза никогда не бывает, поэтому в тех поправках, которые обычно вводят, исходя из априорных сведений о скоростях, всегда есть ошибки, которые приводят к ошибкам в поправках до 30-50 мсек, что явно недопустимо. Следовательно, необходимо определить на основе самой сейсмической информации коррекцию поправок и осуществить ее.
Для определения коррекции может быть использовано суммирование с различными временными сдвигами колебаний трасс, в которые введены предварительные, неточные иоправки. Временные сдвиги можно осуществлять по параболам различной положительной и отрицательной кривизны. По разрастаниям на полученных криволинейных суммолентах определяют коррекцию поправок.
Недостатком известного способа является низкая производительность, поскольку при помощи последовательного сумматора криволинейные суммоленты получаюточень медленно, трасса за трассой; схема корректора кинематических поправок очень громоздка, содержит большое число коммутационных элементов.
Целью изобретения является ускорение процесса получения криволинейных суммолент и упрощение ввода корректирующих поправок.
Эта цель достигается тем, что подлежащие суммированию сигналы подают каждый в отдельную линию задержки, делают в линиях отводы, соответствующие направлениям суммирования по криволинейным осям, суммируют сигналы одного направления со всех линий и записывают суммы при помощи регистратора. Получают криволинейную суммолеиту. Кроме того, подают все суммарные сигналы, соответствующие разным направлеуправляют ключами при помощи программирующего устройства, которое в каждый момент времени открывает один ключ. Таким образом производят коррекцию.
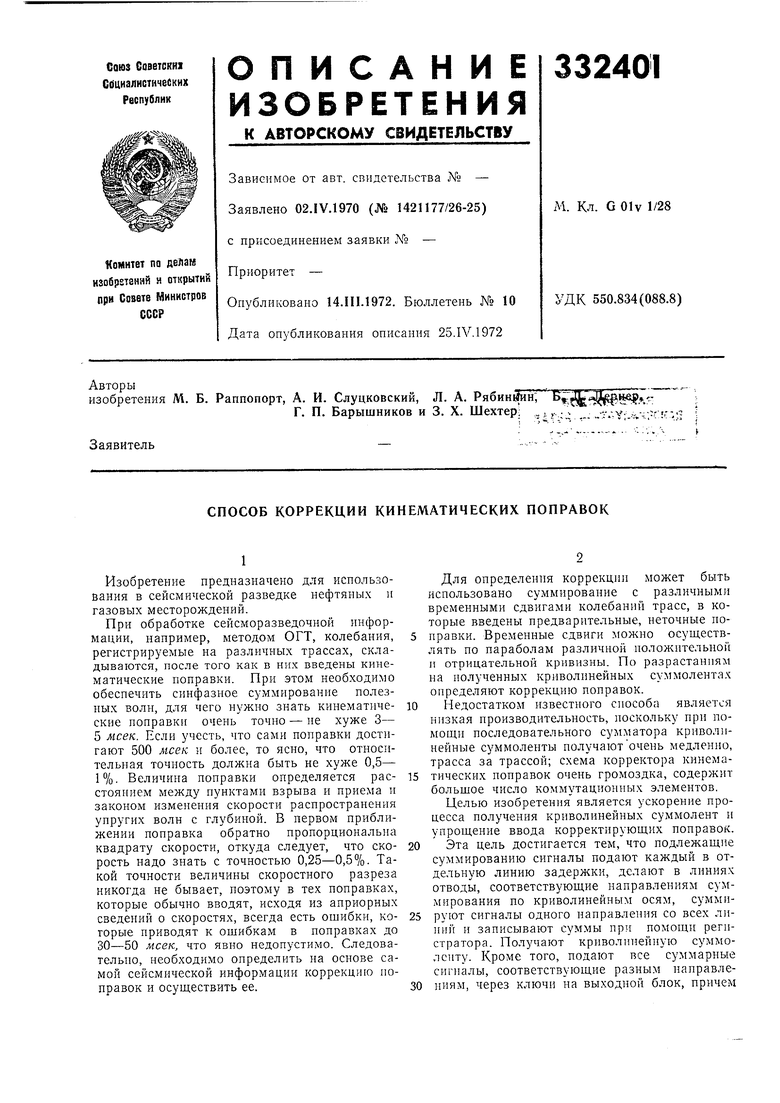
На фиг. 1 показана блок-схема для определения и ввода поправок предложенным способом, содержащая источники / сейсмических сигналов, параллельный сумматор 2 по криволинейным осям с входами 3 и выходами 4, регистратор 5, ключи 6, программирующее устройство 7, выходной блок .
ha фиг. 2 приведены кривые, характеризующие временные задержки для различных направлений суммирования (т - задержка; УИь /И2, ..., Жг - направления суммирования).
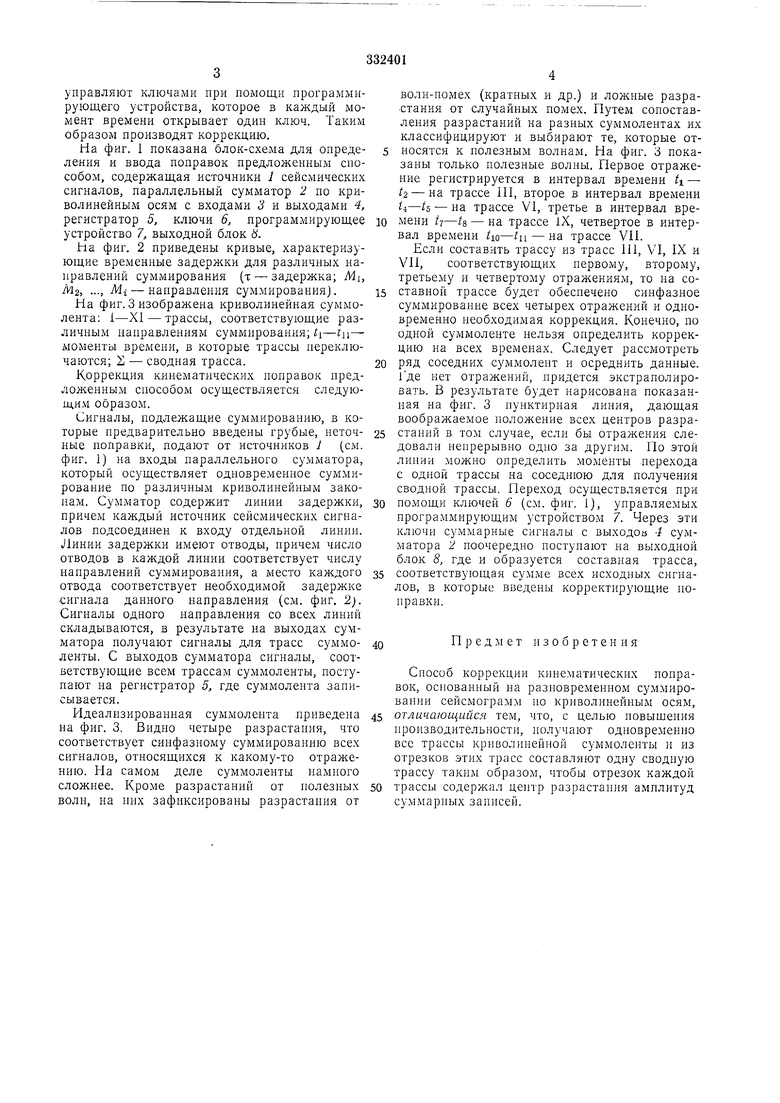
На фиг. 3 изобрал ена криволинейная суммолента: I-XI - трассы, соответствующие различным направлениям суммирования; моменты времени, в которые трассы переключаются; 2 - сводная трасса.
Коррекция кинематических поправок предложенным способом осуществляется следующим образом.
Сигналы, подлежащие суммированию, в которые предварительно введены грубые, неточные поправки, подают от источников / (см. фиг. 1) на входы параллельного сумматора, который осуществляет одновременное суммирование по различным криволинейным законам. Сумматор содержит линии задержки, причем каждый источник сейсмических сигналов подсоединен к входу отдельной линии. Линии задержки имеют отводы, причем число отводов в каждой линии соответствует числу направлений суммировапия, а место каждого отвода соответствует необходимой задержке сигнала данного направления (см. фиг. 2j. Сигналы одного нанравления со всех линий складываются, в результате на выходах сумматора получают сигналы для трасс суммоленты. С выходов сумматора сигналы, соответствующие всем трассам суммоленты, поступают на регистратор 5, где суммолента записывается.
Идеализированная суммолента нриведена на фиг. 3. Видно четыре разрастания, что соответствует синфазному суммированию всех сигналов, относящихся к какому-то отралсению. На самом деле суммоленты намного сложнее. Кроме разрастаний от полезных волн, на них зафиксированы разрастания от
волн-помех (кратных и др.) и ложные разрастания от случайных помех. Нутем сопоставления разрастаний на разных суммолентах их классифицируют и выбирают те, которые относятся к полезным волнам. На фиг. 3 показаны только полезные волны. Первое отражение регистрируется в интервал времени t - h - на трассе III, второе в интервал времени 4-4 - на трассе VI, третье в интервал времени - на трассе IX, четвертое в интервал времени - на трассе VII.
Если составить трассу из трасс 111, VI, IX и VII, соответствующих первому, второму, третьему и четвертОлМу отражения1М, то на составной трассе будет обеспечено синфазное суммирование всех четырех отражений и одновременно необходимая коррекция. Конечно, по одной суммоленте нельзя определить коррекцию на всех временах. Следует рассмотреть
ряд соседних суммолент и осреднить данные. Где нет отражений, придется экстраполировать. В результате будет нарисована показанная на фиг. 3 пунктирная линия, дающая воображаемое положение всех центров разрастаний в том случае, если бы отражения следовали непрерывно одно за другим. Но этой линии можно определить мОхМенты перехода с одной трассы на соседнюю для получения сводной трассы. Нереход осуществляется при
помощи ключей 6 (см. фиг. I), управляемых программирующим устройством 7. Через эти ключи суммарные сигналы с выходов 4 сумматора 2 поочередно поступают на выходной блок 8, где и образуется составная трасса,
соответствующая сумме всех исходных сигналов, в которые введены корректирующие поправки.
Н р е д м е т изобретения
Способ коррекции кинематических поправок, основанный на разновременном суммировании сейсмограмм но криволинейным осям,
отличающийся тем, что, с целью повышепия производительности, получают одновременно все трассы криволинейной суммоленты и из отрезков этих трасс составляют одну сводную трассу таким образом, чтобы отрезок каждой
трассы содерл ;ал це)пр разрастания амплитуд суммарных записей.
Фц.i