Изобретение относится к сейсморазведочной атапаратуре.
Известно устройство для параллельного ввода кинематических поправок по независимым программам, содержа.щее источник программных сигналов, счетчик импульсов, распределитель, электрическую линию задержки и датчики сигналов, подсоединяемые к различным отводам линии через электрические ключи.
Недостатком известного устройства является поканальный ввод кинематических поправок. Кроме того, ввод поправок возможен только до суммирования, выделенното в отдельную операцию. Это значительно удлиняет процесс обработки по способу дифрагированных волн и обшей глубинной точки (ОГТ).
Цель изобретения - обеспечение ввода «инематических поправок по законам произвольным и независимым для каждого канала и одновременного суммирования исправленных сигналов для получения суммотрасс и суммолент по произвольным осям синфазности.
Для этого одновременно обрабатывают сигналы от нескольких датчиков, подсоединяемых к различным отводам одной линии задержки через ряды ключей (число рядов ключей равно числу датчиков сигналов), а операция суммирования производится в самой линии задержки.
2:
Управляющие входы ключей подсоединены к блоку програ.лмных сигналов машин через соответствующие им распределитель и -счетчик импульсов.
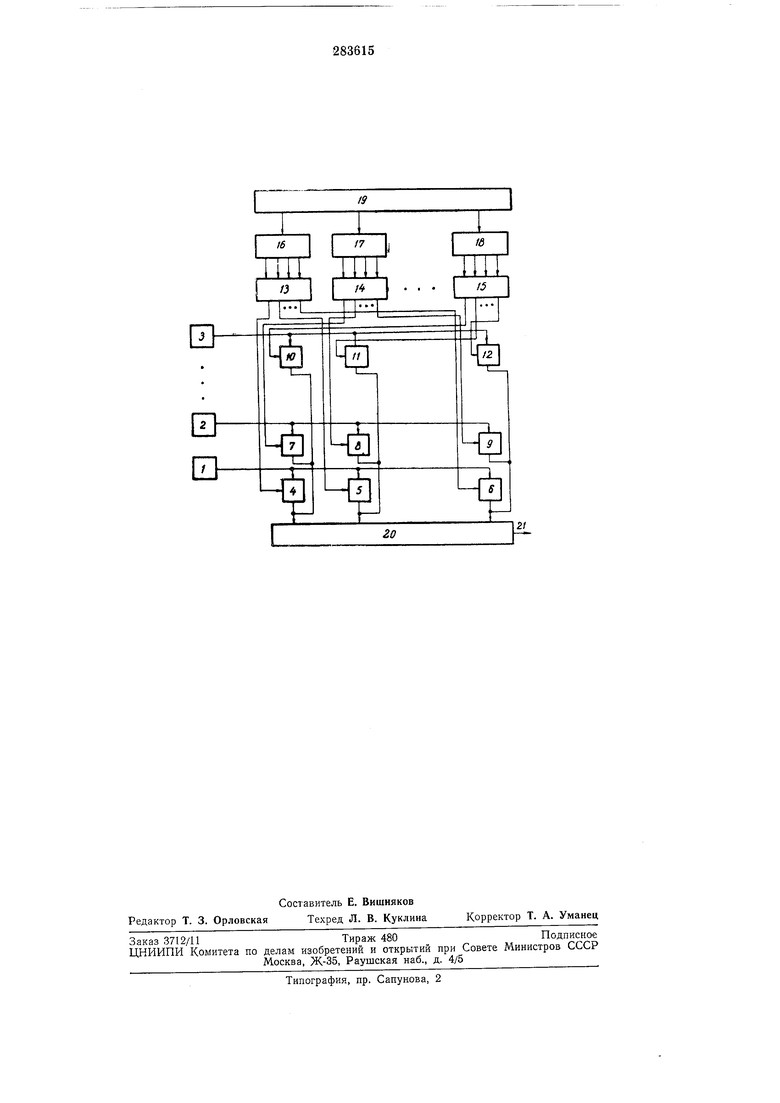
На чертеже дана блок-схема предла-гаемого устройства для суммирования по одному направлению, содержащая датчики /-3 -сейсмических сигналов; ряды электронных ключей 4-12 (число рядов по числу суммируемых
каналов); распределители импульсов 13-15; счетчики импульсов 16-18; блок 19 программных сигналов и электрическую линию задержки 20. Датгики /-3 сейсмических сигналов подсоединены к отводам электрической линии задержки через ряды электронных ключей 4-5, 7-9, 10-12.
Программные импульсы из :блока 19 программных сигналов обрабатывающей машины пост}1пают на входы счетчиков импульсов 16-18, выходы которых подключены ко входам распределителей импульсов 13-15. В каждый момент времени управляющий импульс имеется только на одном выходе распроделителя. Длительность импульса равна интервалу времени между соседними импульсами, считываемыми в блоке программных сигналов. Выходы распределителей 13-15 подсоединены к управляющим входам ключей
мент времеяи открыт только один из ключей одного ряда, а остальные ключи закрыты.
По мере Поступления тарограммяых импульсов на входы счетчиков 16-18 управляющие импульсы распределителей 13-15 последовательно переводят ключи 4-б, 7-9, 10-1/2 из закрытого СОСТОЯНИЯ в открытое, и в соответствии с этим Перемвщаются точки (подключения датчиков 1, 2, 3 к ли«ии. Тем -самым изменяется величина задержки и вводится кинематяческая поправка. В линии задержки 20 сигналы 1C введенными поправками суммируются, и на выходе 21 линии образуется сумMOTipacca сейсмограммы или суммоленты.
Если в машИне имеются для каждого калала -серии импульсов и каждая серия подана на отдельную ши«у, то счетчики импульсов 16-18 и ра:Ьпределители 13-15 «е -нужны.
Для получения суммолент по произвольным осям синфазности в режиме -последовательного суммирования импульсов .программы ввода поправок для канала, наиболее удаленного от пункта взрыва, подаются на вход счетчика, выходы всех разрядов которого соединяются С распределителем. Сигналы с выходов распределителя поступают на -несколько коммутаторов им.пульсов, выбирающих из импульсов программы только те, которые необходимы для ввода поправок в данный канал и Соответствуют одному выбраиному закону скорости для каждой т рассы суммоленты.
Для Получения -суммолент по произвольным осям синфазности в режиме параллельного суммирования импульсов необходимо использовать несколько линий задержки по числу суммарных трасс, а каждый датчнк сигналов подключать через ключи ко всем отводам каждой линии. Блок программных сигналов должен содержать в этом случае источники се;рий программ, каждая из которых соответствует одной трассе суммолент, а выходы каждого источника программ должны быть
подключены к управляющим входам ключей своей линии задержки.
Предмет изобретения
1. Устройстзо для параллельного ввода кинематических поправок по независимым программам и суммирования сигналов с поправками, содержащее источник програМмных сигналов, счетчик импульсов, распределитель,
электрическую линию задержки и датчики сигналов, подключаемые к различным отводам линиИ через ключи, отличающееся тем, что, с целью параллельности ввода поправок ,00 законам произвольным и независимым для
каждого -канала и одновременного суммирования исправленных сигналов, каждый датчик сигналов через соответствующие ему ключи подсоединен к нескольким отводам линии, а к каждому отводу линии подключено несколько датчиков через свои ключи, управляющие входы которых подключены к блоку программных сигналов мащины через соответствующие им распределитель и счетчик импульсов.
2. Устройство по п. I, отличающееся тем, что, с целью Ввода поправок по произвольным осям синфазности и суммирования исправленных сигналов для получения суммолент в последовательном релсиме, блок пропраммных сигналов обрабатывающей мащины подключен к управляющим входам ключей через выходы коммутаторов программных сигналов, соответствующих данной тра-ссе. 3. Устройство по п. 1, отличающееся тем,
что, с целью ввода -поправок по произвольным осям синфазности и суммирования исправленных сигналов для получения суммолент в параллельном режиме, каждый датчик сигналов подключен через ключи к нескольким линиям
задержки, число которых равно числу трасс суммоленты, а выходы каждого источника программ подключены к управляющим входам ключей отдельной линии задержки.