Известен способ управления бесконтактным электродвигателем постоянного тока с коммутацией тока полупроводниковым коммутатором, в систему управления которого входят датчик положения ротора, кольцевой преобразователь и стабилизирующее устройство с задающим генератором, путем изменения скважности импульсов задающего генератора.
Чтобы упростить систему управления и синхронизировать скорость вращения двигателя частотой управляющего сигнала, предлагается импульсы питания постоянной длительности от заданного генератора с частотой, зависимой от фазности, скорости вращения и ч-исла пар полюсов двигателя, подавать на вход датчика положения ротора, при помощи которого их распределяют по элементам кольцевого преобразователя, включенного на вход полупроводникового коммутатора.
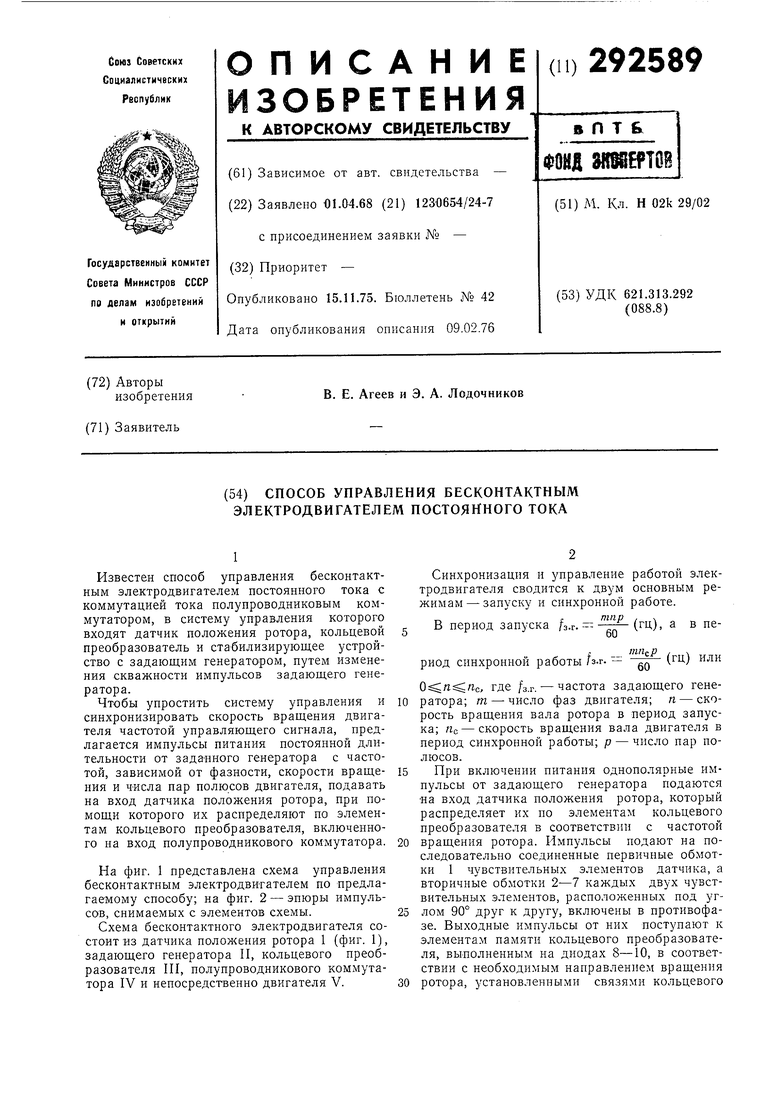
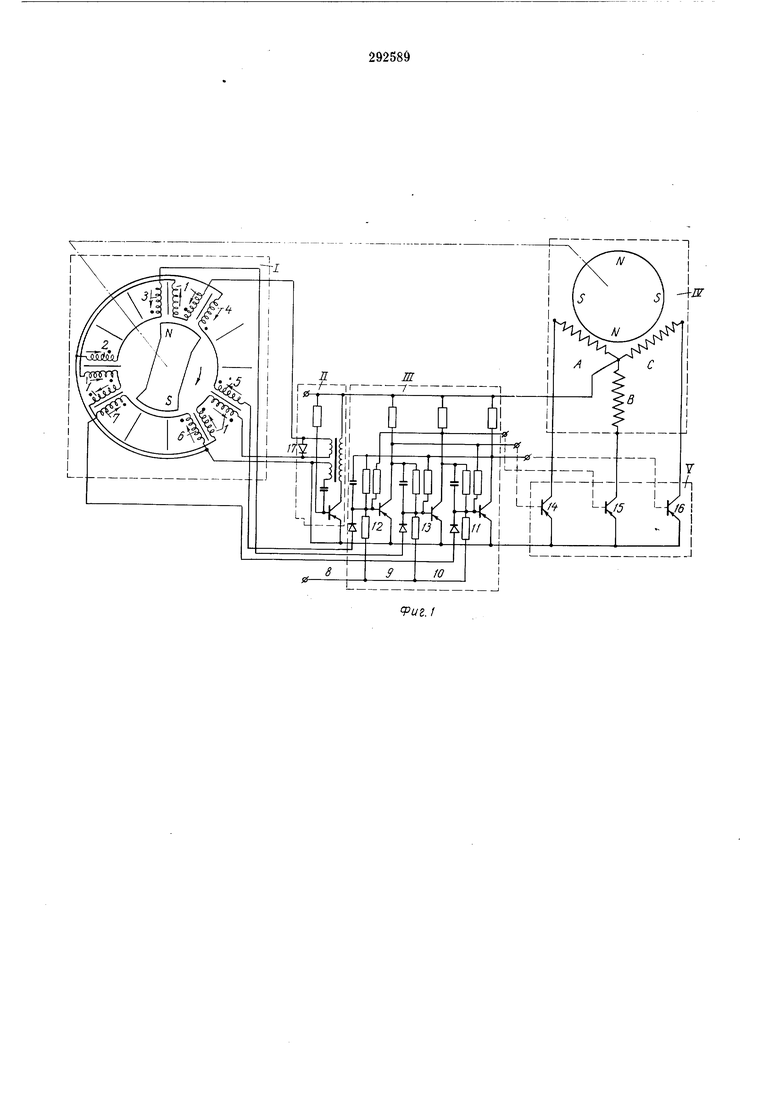
На фиг. 1 представлена схема управления бесконтактным электродвигателем по предлагаемому способу; на фиг. 2 - эпюры импульсов, снимаемых с элементов схемы.
Схема бесконтактного электродвигателя состоит из датчика положения ротора 1 (фиг. 1), задающего генератора II, кольцевого преобразователя III, полупроводникового коммутатора IV и непосредственно двигателя V.
Синхронизация и управление работой электродвигателя сводится к двум основным режимам- запуску и синхронной работе.
В период запуска fa.r. -- (гц), а в пе60
,Inllf P ,
риод синхронной работы /з.г. бо
, где /з.г. - частота задающего генератора; т - число фаз двигателя; п - скорость вращения вала ротора в период запуска; Пс - скорость вращения вала двигателя в период синхронной работы; р - число пар полюсов.
При включении питания однополярные импульсы от задающего генератора подаются на вход датчика положения ротора, который распределяет их по элементам кольцевого преобразователя в соответствии с частотой вращения ротора. Импульсы подают на последовательно соединенные первичные обмотки 1 чувствительных элементов датчика, а вторичные обмотки 2-7 каждых двух чувствительных элементов, расположенных под углом 90° друг к другу, включены в противофазе. Выходные импульсы от них поступают к элементам памяти кольцевого преобразователя, выполненным на диодах 8-10, в соответствии с необходимым направлением вращения ротора, установленными связями кольцевого преобразователя, выполненного иа триггере с 3-мя устойчивыми состояниями, и пространствеипым расположением фаз статора и нолюсов роторов ак д-вигателя, так и датчика положения. Импульсы-цйтания задающего генератора изменяют поток в чувствительных элементах датчика положения ротора, но так как ротор самого датчика занимает определепное положение, то трансформация импульсов будет осуш,ествляться не во все вторичные обмотки, а только в обмотки 2, 5, 6 и 7. В обмотки 3 и 4 трансформации не будет, так как их сердечники насыщены магнитом ротора датчика. В результате на входы диодов 8-10 триггера будет подаваться импульсы в следующей последовательности: на транзистор 11 триггера импульсы не подаются, так как они взаимоуничтожаются противофазным включением обмоток 6 и 7, на транзистор 12 импульсы также не подаются, так как они трансформируются отрицательными и срезаются диодом 8. Подаются импульсы только на транзистор 13, гак как с обмотки 2 снимаются положительные импульсы. В результате транзистор 13 закрыт положительным иимпульсами датчика, транзистор 12 остается закрытым, а транзистор И открывается благодаря связям кольцевого преобразователя. Вследствие такого состояния кольцевого преобразователя сигналы управления подаются на полупроводниковый коммутатор IV, транзисторы 14 и 15 закрыты, а транзистор 16 открывается. По фазе С течет ток, происходит рассогласование между намагничивающей силой ротора и нахМагничивающей силой фазы статора. Ротор поворачивается на 120 электрических градусов. Соответственно перемещается ротор датчика по направлению, указанному на фиг. 1 стрелкой. В результате в обмотке 6 датчика положения продолжается трансформация положительных импульсов, а в обмотке 7 прекращается, так как произощло насыщение сердечника от ротора датчика, и транзистор 11 запирается положительными импульсами, на транзисторы же 12 и 13 сигналы не подаются на аналогии с ранее описанным циклом, но благодаря связям триггера открывается транзистор 12. Транзистор 14 коммутатора также открывается, а транзистор 16 закрывается. Ток течет по фазе А. Снова происходит рассогласование между намагничивающей силой ротора и фазой Л статора. Вращение продолжается, а описанный процесс повторяется. При достижении синхронной скорости на каждую фазу двигателя приходится только по одному импульсу. Поэтому при всяком стремлении ротора превзойти установленную скорость на каждый последующий элемент кольцевого преобразователя прекращается подача необходимого импульса. Фаза остается включенной по предыдущей памяти, из-за чего происходит мгповенное электродинамическое торможение, приходит следующий импульс, фаза переключается, и вращение продолжается с заданной скоростью. Па фиг. 2 эпюра 1 изображает импульсы, снимаемые с задающего генератора после диода 17. Эпюры 2-4 изображают импульсы, снимаемые со вторичных обмоток датчика. Эпюры 5-7 - это те же эпюры 2-4, но отрицательные их импульсы срезаны диодами 8-10. Эпюры 8-10 - импульсы на элементах кольцевого преобразователя, полученные в результате преобразования импульсов по эпюрам 5-7. Эпюры 11 -13 - импульсы, получаемые на фазах двигателя с учетом противо - э. д.с. Предмет изобретения Способ управления бесконтактным электродвигателем постоянного тока с коммутацией тока посредством полупроводпикового коммутатора, в систему управления которого входят датчик положения ротора, кольцевой преобразователь и стабилизирующее устройство с задающим генератором, путем измепеПИЯ скважпости импульсов задающего генератора, отличающийся тем, что, с целью упрощения системы управления, импульсы питания постоянпой длительности от задающего генератора с частотой, зависимой от фазности, скорости вращения и числа пар полюсов двигателя, подают на вход датчика положения ротора, ири помощи которого распределяют их по элементам кольцевого преобразователя, включепного на вход полупроводникового коммутатора.
Запуск
/ 2
д 4
5 6 7
д 9
Ш //
/2 Id
CuMxpoHHafl paSoma
I I -I-1-
1L
TT
LL
i г
L
I rZUJZlEZL
j-u-u-1
ЛУГА/