)1
Изобретение относится к области автоматики, телеметрии и вычислительной техники.
Известно устройство для опознавания изображений, содержащее электронно-оптический преобразователь со .световолоконной планшайбой, блоки для перемещения изображения, матрицу светочувствительных элементов (сетчатку).
Для такого устройства характерна расфокусировка при изменении расстояния (дальности) до анализируемого объекта.
Предложенное устройство отличается тем, что оно содержит модели рецептивных полей, состоящие из коммутаторов входных цепгй и решающих блоков, подключенных к устройству управления анализом и .самонастройкой на максимум выходных сигналов рецептивных полей ири изменении их размеров, положения, топологической организации их входных цепей и расстояния между объективом и плоскостью фотокатода, осуществляемом с ПОМОЩЬЮ информационных обратных связей от регистров управляемых параметров до устройств управления коммутаторами рецептивных полей и привода оптической фокусировки дальномера.
Предложение позволяет устранить явление расфокусировки при изменении расстояния (дальности) до анализируемого объекта и
вычислить расстояние (дальность) до объектов для описания и опознавания.
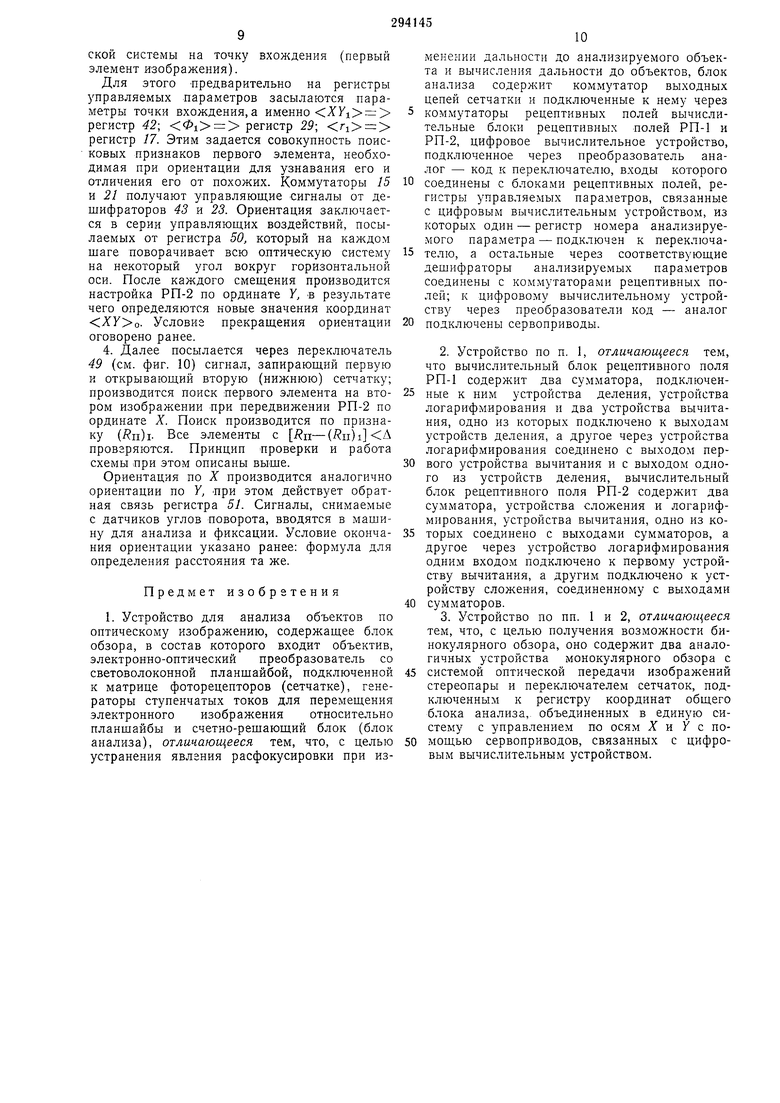
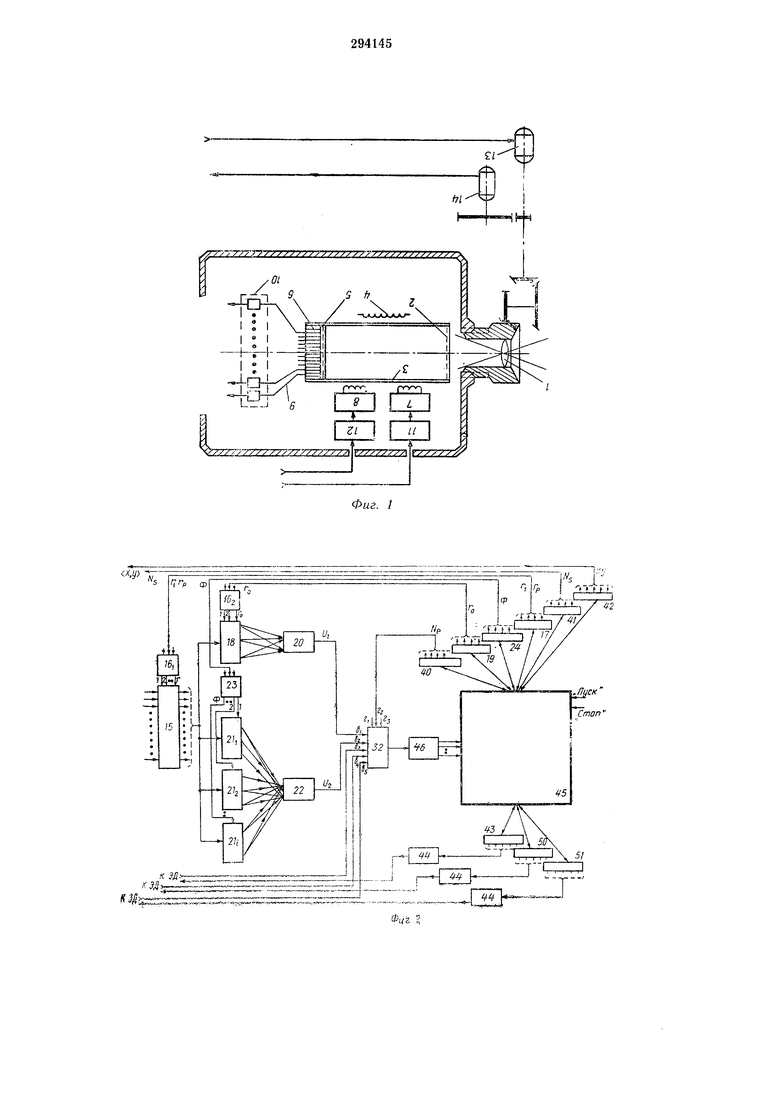
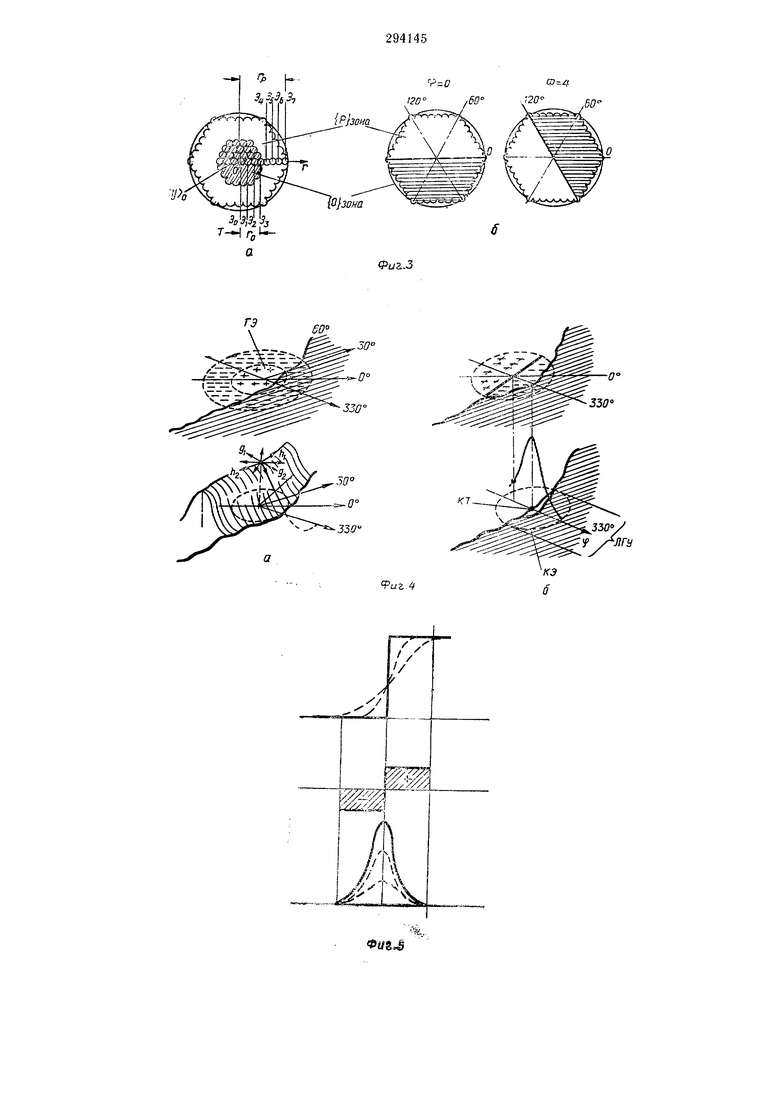
На фиг. 1 показана блок-схема монокулярного устройства обзора, входящего в состав устройства для анализа объемных объектов; на фиг. 2 - блок-схема устройства анализа как для монокулярного, так и для бинокулярного обзора; на фиг. 3 - топологическая
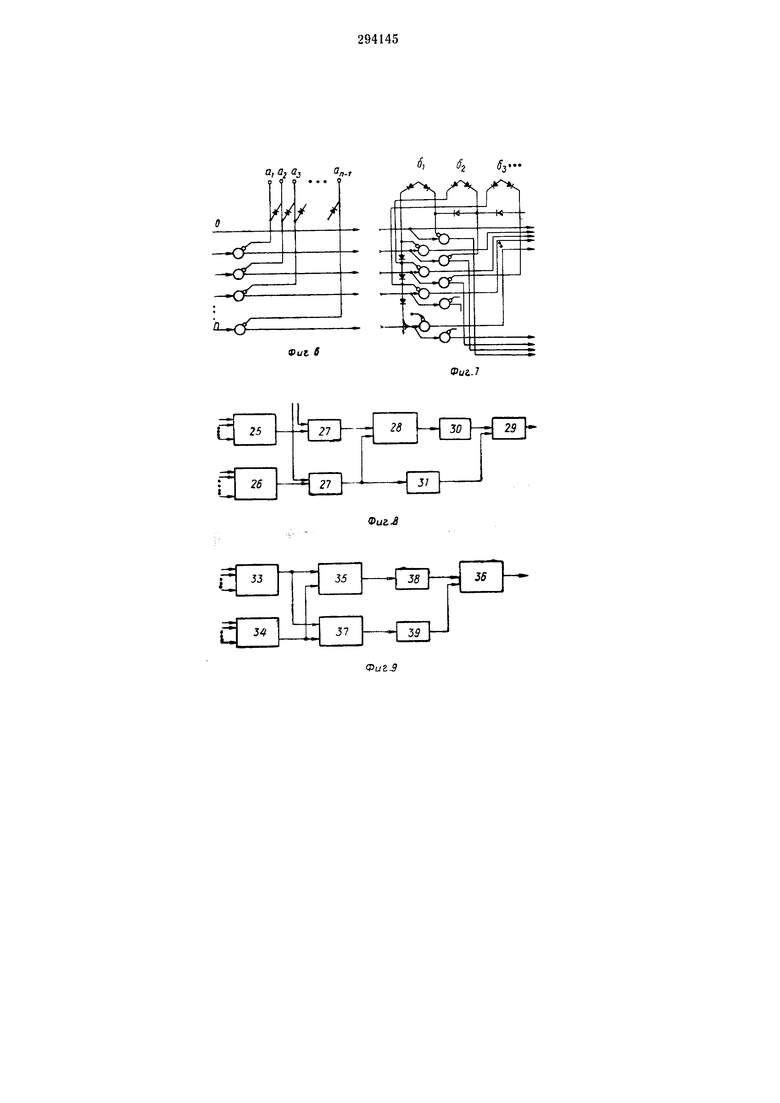
организация рецептивных полей РП-1 и РП-2 ,(с, б); на фиг. 4 иллюстрируется понятие локальных элементов изображения и принципы их выделения с помощью РП-1 (а) и РП-2 (б); фиг. 5 показывает зависимость выходного сигнала РП-2 при различной степени фокусировки перепада яркостей от положения РП-2; на фиг. 6 изображена схема коммутации выходных цепей сетчатки, формирующая активный участок заданного размера; на фиг. 7 показана схема коммутации активного участка в РП-1, обеспечивающая выделение в нем двух зон: центральной и периферической; на фиг. 8 представлена счетно-решающая схема, реализующая функции
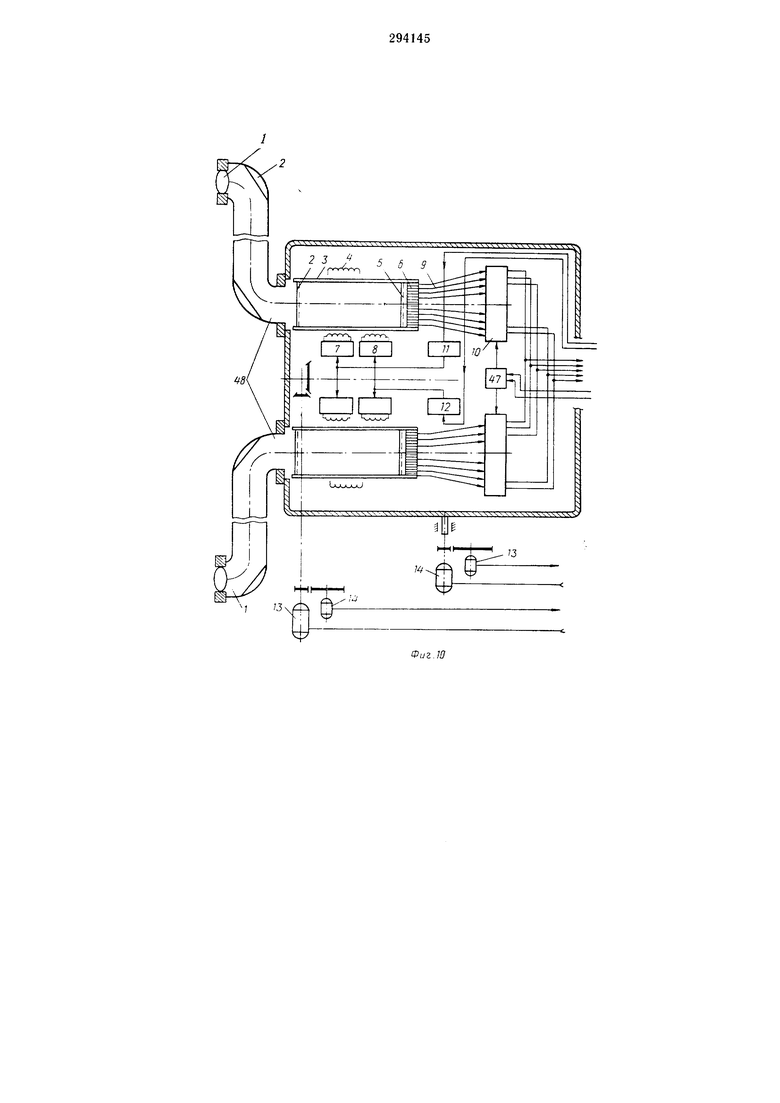
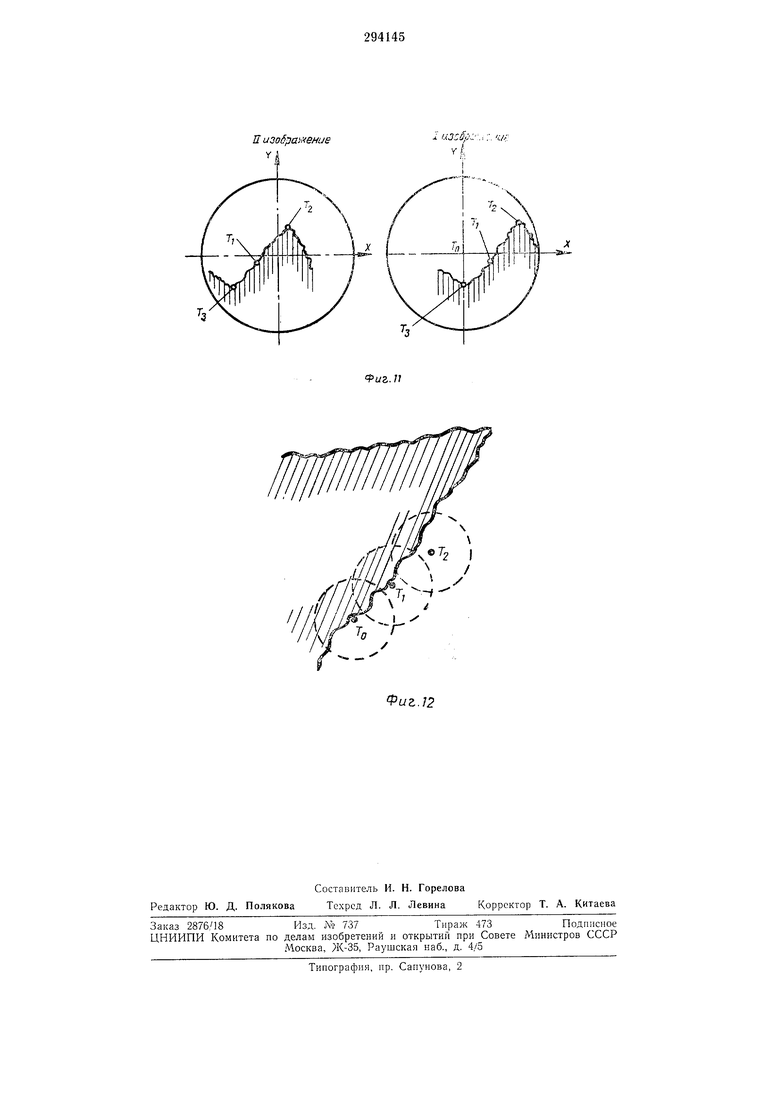
рецептивного поля РП-1; на фиг. 9 - то же для РП-2; на фиг. 10 показана блок-схема бинокулярного устройства обзора; фиг. 11 - иллюстрирует возможный вид анализируемых участков изображений стереопары, а фиг. 12 3 Устройство обзора (см. фиг. 1 и 10) содержит объектив /, проектирующий на фотокатод 2 электронно-оптического преобразователя 3 оптическое изображение объекта. Магнитное поле, создаваемое катушкой 4, фоку-5 сирует электронное изображение на слой люминофора 5, нанесенного с внутренней стороны волоконной планщайбы 6. Генераторы 7 и S ступенчатых адресных токов отклонения по осям X и У обеспечивают пере-Ю мещение электронного изображения относителыю планщайбы. Группа стекловолокон 9 переводит световой поток на сетчатку 10 с сохранением упорядоченности. Кроме того, устройство содержит преобразователи код-15 аналог 11 и 12 для координат по X и У соответственно, а также устройство изменения фокусировки. Последнее содержит, например, реверсивный электродвигатель или электронный усилитель 13 с механической передачей20 и датчик угла поворота 14, например, линейный вращающийся трансформатор с шестеренчатой передачей. Устройство анализа (см. фиг. 2) содержит коммутатор 15 выходных цепей сетчатки.25 Входные цепи его соединены с сетчаткой, выходные-параллельно с коммутаторами рецептивных полей. Цепи управляющего входа коммутатора 15 подсоединены к выходным цепям дешифратора /б, кода внешнего ра-30 диуса, соединенного с регистром 17 радиуса. Схема коммутатора 15, часть которой (образованная центральным элементом и элементами Эо, 3i, Зг,..., расположенными по радиусу - см. фиг. 3, а) изображена на фиг. 6,35 состоит из группы N вентильных элементов, запирающие входы которых соединяются с цепями управляющего входа «i, а, «з . коммутатора. Цепи управляющего входа коммутатора /840 рецептивного поля РП-1 подсоединены к выходным цепям дещифратора кода внутреннего радиуса, вход которого соединен с регистром 19 внутреннего радиуса. Выходные цепи коммутатора 18 подсоединены к поло-45 жительному и отрицательному входам блока 20 рецептивного поля РП-1 (по N цепей). Часть схемы коммутатора изображена на фиг. 7. Он состоит из совокупности 2/V - 1 вентильных элементов, запирающие входы50 которых соединяются с цепями 6i, 62, 63 управляющего входа коммутатора и разделительных диодов. Каждый из коммутаторов 21 рецептивного поля РП-2 подключен к коммутатору 15. Вы-55 ходные цепи каждого коммутатора по цепей подключены к входам («+ и «-) блока 22 рецептивного поля РП-2. Входные цепи коммутатора 23 кода ориентации соедииены с регистром 24 ориентации. Направле-60 ние разделяющего диаметра ф (фо, ф, ф.-.} и номер коммутатора совпадают. Блок 20 рецептивного поля РП-1 (см. фиг. 8) содержит сумматоры 25 и 26, устрой4рифмирования (30, 31. Выходы («-р и «-) сумматоров соединены с соответствующими группами цепей {0} и Р. Выходной сигнал L/i подается на один из входов Si переключателя 32. Схема блока 22 рецептивного поля РП-2 представлена на фиг. 9. Блок содержит два сумматора 33 и 34, устройства вычитания 35 и 36, сложения (57) и логарифмирования (38 и 39). Выход t/o блока 22 подключен к одному из входов в переключателя 32. Регистры 40, 19, 24, 17, 41, 42 управляемых параметров-ячейки памяти для кодов: номера анализируемого параметра Лр внутргннего радиуса Го, ориентации разделяющего диаметра ф внещнего радиуса , номера сетчатки N, координат X.Y. Они соединены соответственно со входом переключателя 32, с дешифратором 16 кода внутреннего радиуса, с дешифратором 23 кода ориентации, с дешифратором 16 кода внешнего радиуса, с координатными преобразователями код- аналог 11. Кроме перечисленных в с.кеме имеется специальный регистр 43 для управления сервоприводом, соединенный с преобразователем код - аналог 44. Последний подключен к электромеханическим элементам устройства обзора (см. фиг. 1). Каждый i-й регистр содержит Пг 1ост„ , разрядов (/7 - число значении представл,.емого г-го параметра).Папример, если Р;, 128, то;г; 7 разрядов. Каждому разряду соответствует триггер. Регистры соединены с ячейками ОЗУ - оперативного запоминающего устройства цифрового вычислительного устройства (ЦВУ) 45. Преобразователи код - аналог 44 и аналог - код 46 - стандартные. Входы преобразователя 44 подключены к регистрам угловых величин, а выходы их - к устройствам сервопривода. Преобразователь аналог - код 46 подключается переключателем 32 к любому источнику анализируемого параметра: к одному из рецептивных полей или к датчику угла поворота. Каждый из дещифраторов 16, 16, 23 имеет число входов, равное числу разрядов в соответствующем регистре. Многоканальная линия, соединяющая регистр и дешифратор, по которой передается код значения управляемого параметра, является информационной обратной связью. Выходные цепи каждого дещифратора подсоединяются к своему коммутатору. Цифровое вычислительное устройство 45 содержит арифметическое устройство и блок памяти (ОЗУ). На вход ЦВУ поступает код значения анализируемого параметра с преобразователя 46. Выходными являются цепи всех перечисленных выще регистров. Переключатель 32 анализируемых параметров имеет пять входных цепей, один выход гистром 40. Он .предстзвляет собой комбинационную схему, подключающую одну из входных цепей в1-б5 к преобразователю аналог-- код 46, в зависимости от комбинации на управляющем входе. Устройство рассчитано на работу при последовательной стратегии. Отработка любой задачи начинается с последовательного выполнения следующих операций: поиск точки, находящейся вблизи границы контраста; выделение граничного элемента (ГЭ); локальный анализ окрестностей ГЭ и опознание локального элемента изображения; выделение контурного элемента (КЭ), локального граяичного участка (ЛГУ) и контурной точки (КТ); обработка -специальных задач. Поиск ГЭ производится с помощью РП-1. Параметры поиска, а именно тип траектории движения РП-1 по изображению и параметры этого движения (направление, щаг, длина строки поиска), а также размер РП-1 задаются априорно на основании опыта или получаются следующим образом. Задание значений этим параметрам производится засылкой соответствующих кодов на регистры ЦВУ. На регистр 40 засылается «1, и выход блока 20 РП-1 подключается к преобразователю 46. На регистр 77 засылается код величины Гр и дешифратор 16i возбуждает соответствующую цепь коммутатора 15, выделяя активный участок сетчатки. На регистр 19 засылается код величины Го и дешифратор 16 возбуждает определенную управляющую цепь коммутатора 18 РП-1, который делит весь активный участок на 2 зоны: {0} и {Р}. На преобразователи координат блока обзора засылаются начальные значения координат X и У. Если используется бинокулярное устройство обзора, то на регистр 41 и на переключатель сетчаток 47 (см. фиг. 10) посылается сигнал, запирающий вторую сетчатку. В режиме поиска РП-1 передвигается по изображению. При этом на регистр 42 координат каждый раз засылаются новые значения и на каждом шаге анализируется выходной сигнал Ri РП-L Если , то поиск продолжается, если ()A, начинается выделение ГЭ. При этом запоминается значение/ i; .i. Значение координат ХУ центра РП-1, давшего () А, считываются с регистра 42 и засылаются в специально отведенную ячейку .Они теперь становятся центром движений типа «Звезда. При таком движении центр РП-1 занимает последовательно шесть или двенадцать положений вокруг центра «Звезды .Й1У на расстоянии |л от него через равные угловые интервалы (АЯ 60° или 30°) от О до 2я. Координаты ..„...,.;., „„„..,, ,.т-р„рт,я ХУ вычисляются каждой точки отсчета , г вычисляются , , Символ а ± s означает, что параметр а где Д цСорЯ, ДК.151пЯ, Н - текущее направление (О, 0+А//, 0-f+2АЯ, ...). Для каждой точки отсчета , i снимается значение i и сравнивается с зафиксированным ранее м; при записываются координаты , , и сигнал . Таким образом, в л-окрестности обнаруженной точки находится новая точка, в которой сигнал больше, чем в любой из этой окрестности. При этом происходит перемещение репрезентативной точки Х, У, R по поверхности отклика (см. фиг. 4, а). Теперь центром становится найденная точка и в|д-окрестности снова идет поиск точки с максимальным Ri. Самонастройка продолжается до тех пор, пока Рм не перестанет увеличиваться. Точка Х, У, / поднимается на локальный максимум ()макс. Самонастройка по положению (СН-1) закончилась. Далее следуют пробные изменения размеров РП-1, а именно сначала Го уменьшается на единицу и производится самонастройка по положению СН-1. Увеличение ()макс служит признаком, что из {О} и {Р} исключаются посторонние участки. Самонастройка по Го и XY (СН-2) продолжается до тех пор, пока ()макс не перестанет расти. Обе эти процедуры самонастройки, при которых управление параметрами РП-1 ведется по информационной обратной связи от регистров 19, 17, 42, приводят к выделению ГЭ (см. фиг. 4, а. Далее исследуется окрестность выделенного ГЭ, в частности локальный «рельеф поверхности отклика вблизи ГЭ. Производится несколько шагов в каждом направлении Hi (О, 30°, 60°...). Анализ приращений и знака i на каждом направлении дает возможность выделить направления ,,,,-, - / () хребтов (j. е. линии с минимальной И направления H(g производной / градиентов (линии с максимальной производгл/ 1ной --- . Упорядоченная совокупность / градиентов и хребтов Я(), Я(/г), полученная при сканировании вдоль двенадцати лучей «Звезды, вместе со значением (i) макс в точке ХУ является описанием локальной конфигурации, по которой возможно опознавание элемента изобрал ения, например «пятна, «конца полосы, «элемента полосы, «разветвления полос, «пересечения полос, «элемента края и т. д. (всего 7 элементов). Для примера список хребтов ГЭ, изображенного на фиг. 4, а будет тов для него же будет 5() + 150°; -330°. Знак при направлении градиента указывает наличие границы контраста в этом нанравлении. Опознание локальной конфигурации служит решением самостоятельной задачи. При этом Б памяти ЦВУ можно записать признак (индекс) опознанного элемента, его параметры и список хребтов и градиентов. Далее может отрабатываться любая другая задача. Например, опознав элемент края (см. фиг. 4, а), мы можем выделить КЭ, ЛГУ, КТ. Для этого вычисляется направление, перпендикулярное градиенту со знаком «-, т. е. 5,ч 15 параллельное границе контраста ( Ф з- включается соответствующий 30 коммутатор РП-2. Кроме того, переключатель 20 32 ставится в положение rj, т. е. анализируется выходной сигнал блока РП-2. При поиске КЭ, ЛГУ, КТ РП-2 двигается мелкими шагами в направлении к границе контраста (см. фиг. 4,6) до тех пор, пока выходной сигнал 25 РП-2 не достигает максимума. Затем ищутся пробные изменения параметров Г1, увеличивающие найденную величину Rii, т. е. происходит самопастройка по этим параметрам. В результате выделены два участка, лежащие по разную сторону границы контраста (см. фиг. 4,6 внизу). Значение ()макс в точке локального максимума характеризует локальный контраст на границе. Далее значение ()макс запоминается, нереключатель 32 ставится в положение Гз, для чего на регистр 40 засылается код «3. При этом ко входу преобразователя 46 и ЦВУ подключается напряжение с датчика 14 угла поворота привода фокусировки оптической системы. Значение 0 может быть нересчитано в расстояние L между второй главной плоскостью оптической системы и фотокатодом. Изменение расстояния L и фокуси- 45 ровки в ту или другую сторону может быть осуществлено засылкой на регистр 43 положительного или отрицательного числа (кода), представляющего управляющее воздействие на орган управления. Преобразованный 50 в непрерывную величину (в аналоговую форму) сигнал с преобразователя 44 нодается на электродвигатель 13. Весь процесс фокусировки разбивается на щаги (интервалы времени). На кждом щаге измеряется новое 55 значение UzL, производится замер и анализ значений локального контраста и его приращений, для чего переключатель 32 периодически ставится в положение Г2. Уменьшение локального контраста говорит о расфокуси- 60 ровке, знак управляющего воздействия изменяется на обратный. При увеличении локального контраста движение продолжается в ту же сторону. Наводка на резкость заканчи510 30 35 40 лен. Определение расстояния до объекта производится по приводившейся ранее формуле. Наиболее простым является измерение расстояния до объекта компактной (пятнообразной) формы. В этом случае настройка по «Положению и «Размеру РП-1 выделяет весь объект из фона. Выделение КЭ, ЛГУ, КТ не требуется, и фокусировка может идти при периодическом анализе выходных сигналов РП-1, а не РП-2; переключатель 32 при этом ставится в положение Гь Устройство обзора для бинокулярного анализа объектов (см. фиг. 10) содержит два аналогичных устройства монокулярного обзора и дополнительно - систему оптической передачи изображений стереопары 48 и переключатель сетчаток 47. При работе на таком устройстве после выделения двух участков, лежаш,их по разные стороны границы контрастов, производятся следующие операции. 1. Фиксируются параметры РП-2 в выделенной точке, которая считается первым элементом изображения (точкой вхождения). 2. Описывается граница контура от точки вхождения до точки излома (или точки перегиба), лежащей в верхне.м секторе направлений (0-180°). Описание контурной линии (КЛ) производится следующим образом. РП-2 смещается от точки вхождения в направлении а, соответствующем разделяющему диаметру Ф на длину i., равную радиусу РП-2 (из Го в 7,, см. фиг. 12). В новой точке отсчета производится замер выходного сигнала Кц. Если уровень сигнала существенно понизился, и РП-2 сходит с КЛ, то производится подстройка по XY и Ф, в противном случае шаг повторяется (см. фиг. 12). Такая следящая операция выделяет совокупность контурных точек и соединяюн их их отрезков известной длины и направлений. При этом место резкого изменения направления фиксируется как точка излома. Найденная точка считается вторым элементом изображения (2, фиг. 1Г 3. В окрестности найденной точки выделяется граничный элемент, описывается его окрестность и онознается тип этого локального элемента, т. е. реализуется последовательность операций, описанная выше. Это описание служит кодом элемента. Вычисляются связи между точками Tj и Т-) и А . Описывается граница контура от точки вхождения в нижнем (.180-360°) секторе до точки излома (перегиба). Найденая точка считается третьим элементом (Гз, фиг. 12). В окрестности этой точки отыскивается ГЭ и описывается его локальная конфигурация. Получено описание 3-го элемента. Теперь вычисляются характеристики связей и AFis между точками Т и Гз. На этом анализ совокупности трех взаимосвязанных элементов
ской системы на точку вхождения (первый элемент изображения).
Для этого Предварительно на регистры управляемых параметров засылаются параметры точки вхождения.а именно регистр 42; регистр 29; ri - регистр 17. Этим задается совокупность поисковых признаков первого элемента, необходимая при ориентации для узнавания его и отличения его от похожих. Коммутаторы 15 и 21 получают управляющие сигналы от дешифраторов 43 и 23. Ориентация заключается в серии управляющих воздействий, посылаемых от регистра 50, который на каждом шаге поворачивает всю оптическую систему на некоторый угол вокруг горизонтальной оси. После каждого смещения производится настройка РП-2 по ординате Y, в результате чего определяются новые значения координат . Условие прекращения ориентации оговорено ранее.
4. Далее посылается через переключатель 49 (см. фиг. 10) сигнал, запирающий первую и открывающий вторую (нижнюю) сетчатку; производится поиск первого элемента на втором изображении при передвижении РП-2 по ординате X. Поиск производится по признаку (Ru)i- Все элементы с Rn-(ii) проверяются. Принцип проверки и работа схемы при этом описаны выше.
Ориентация по X производится аналогично ориентации по Y, при этом действует обратная связь регистра 51. Сигналы, снимаемые с датчиков углов поворота, вводятся в машину для анализа и фиксации. Условие окончания ориентации указано ранее: формула для определения расстояния та же.
Предмет изобретения
1. Устройство для анализа объектов по оптическому изображению, содержащее блок обзора, в состав которого входит объектив, электронно-оптический преобразователь со световолоконной планшайбой, подключенной к матрице фоторецепторов (сетчатке), генераторы ступенчатых токов для перемещения электронного изображения относительно планшайбы и счетно-решающий блок (блок анализа), отличающееся тем, что, с целью устранения явления расфокусировки при изменении дальности до анализируемого объекта и вычисления дальности до объектов, блок анализа содержит коммутатор выходных цепей сетчатки и подключенные к нему через
коммутаторы рецептивных полей вычислительные блоки рецептивных полей РП-1 и РП-2, цифровое вычислительное устройство, подключенное через преобразователь аналог - код к переключателю, входы которого
соединены с блоками рецептивных полей, регистры управляемых параметров, связанные с цифровым вычислительным устройством, из которых один - регистр номера анализируемого параметра - подключен к переключателю, а остальные через соответствующие дешифраторы анализируемых параметров соединены с коммутаторами рецептивных полей; к цифровому вычислительному устройству через преобразователи код - аналог
подключены сервоприводы.
2.Устройство по п. 1, отличающееся тем, что вычислительный блок рецептивного поля РП-1 содержит два сумматора, подключенные к ним устройства деления, устройства логарифмирования и два устройства вычитания, одно из которых подключено к выходам устройств деления, а другое через устройства логарифмирования соединено с выходом первого устройства вычитания и с выходом одного из устройств деления, вычислительный блок рецептивного поля РП-2 содержит два сумматора, устройства сложения и логарифмирования, устройства вычитания, одно из которых соединено с выходами сумматоров, а другое через устройство логарифмирования одним входом подключено к первому устройству вычитания, а другим подключено к устройству сложения, соединенному с выходами
сумматоров.
3.Устройство по пп. 1 и 2, отличающееся тем, что, с целью получения возможности бинокулярного обзора, оно содержит два аналогичных устройства монокулярного обзора с
системой оптической передачи изображений стереопары и переключателем сетчаток, подключенным к регистру координат общего блока анализа,, объединенных в единую систему с управлением по осям X и У с помощью сервоприводов, связанных с цифровым вычислительным устройством.
L
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АНАЛИЗА ИЗОБРАЖЕНИЙ | 1970 |
|
SU277413A1 |
| Устройство для отображения информации на экране цветного телевизионного индикатора | 1985 |
|
SU1354243A1 |
| ФОРМИРОВАТЕЛЬ ИЗОБРАЖЕНИЯ | 1993 |
|
RU2098865C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОЛОСЫ ПРОПУСКАНИЯ РЕЦЕПТИВНЫХ ПОЛЕЙ НЕЙРОНОВ ЗРИТЕЛЬНОЙ СИСТЕМЫ | 2009 |
|
RU2417044C1 |
| Устройство для измерения амплитуды и фазы радиосигнала | 1989 |
|
SU1665811A1 |
| Устройство для кампиметрических исследований | 1985 |
|
SU1297793A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОСЫ ПРОПУСКАНИЯ РЕЦЕПТИВНЫХ ПОЛЕЙ НЕЙРОНОВ ЗРИТЕЛЬНОЙ СИСТЕМЫ | 2003 |
|
RU2240029C1 |
| Устройство для воспроизведения функций | 1985 |
|
SU1273955A1 |
| Устройство для измерения напряжения постоянного тока | 1981 |
|
SU1068826A1 |
| Устройство для решения нелинейных краевых задач | 1987 |
|
SU1683028A1 |
)
Э b W 1
-% j, jj Т-Чго -
294145
V-D - 2D/50°- 20 6 7Фиг.4
}ШЩ
.i/tk
I /.
О; Ог г -t
t О
/
а- 5Фие
--4
П изобрш- ение
