Изобретение относится к технике для моделирован-ия зрительных анализаторов биологических систем.
В зрительном анализаторе биологических систем для восприятия изображений используются специализированные системы, выполняющие функции выделения на локальных участках изображения наиболее часто встречающихся элементов (закруглений, краев, полос).
Известно устройство для анализа изображений, содержащее объектив, эл.ектронно-оптический преобразователь или усилитель изображений с фокусирующилги и отклоняющими катушками и выходной волоконной планшайбой, матрицу фоточувствительных элементов (сетчатку) и сервопривод сканирования изображения с двигателями и датчиками перемещения. Объектив проецирует изображение на фотокатод электронио-оптического преобразователя. Электронное изображение с помощью магнитного поля фокусируется на слой малоииерциониого люминофора, нанесенного с внутренней стороны волоконной планшайбы. Вырабатываемые генераторами ступенчатые токи с помощью отклоняющих катушек перемещают изображение относительно планшайбы.
(сетчатку). Интегрирующая способность глаза, используемая для загрубления при быстром предварительном поиске, имитируется соединeниe цепей от мелких волокон («центральной ямки), груцца которых располагается посередине сетчатки.
Известное устройство не приспосабливается к изменяющимся параметрам входных сигналов и пе выделяет типовые разновидности локальных элементов изображения при разной форме, величине и ориентации этих элементов. Поэтому оно не может быть применено для анализа многотоковых и контурных изображений в условиях изменяющегося уровня
шумов.
Цель настоящего изобретения - создание устройства для анализа изображений, нозволяющего анализировать л ноготоновые, контурные и силуэтные изображения в условиях
изменяющегося уровня шумов.
Предлагаемое устройство отличается тем, что оно дополннтельно содержит фильтр сетчатки, детекторы элементов изображения, дешифраторы кодов, переключатель и вычислитель, причем сигнальные входы фильтра сетчатки подключены к выхода; матрицы светочувствительных элементов, а управляющие входы - к выходам соответствующего дешифратора кода; сигнальные входы детекторов
ми фильтра сетчатки, управляющие входы - с выходами соответствующих дешифраторов кодов, а выходы--через переключатель ко входу вычислителя, выходы которого подключены к управляющим входам отклоняющей системы, дещифраторов кодов, переключателя, рещающих устройств детекторов элементов изображения, двигателей сервопривода сканирования. Датчики перемещения устройства подключены к соответствующим входам переключателя.
С целью выделения характерных локальных признаков Изображения выходы каждого фильтра детекторов элементов изображения объединень в группы, соответствующие одной из двух зон активного участка матрицы светочувствительных элементов. При этом каждая группа подключена к соответствующему сигнальному входу рещающих блоков.
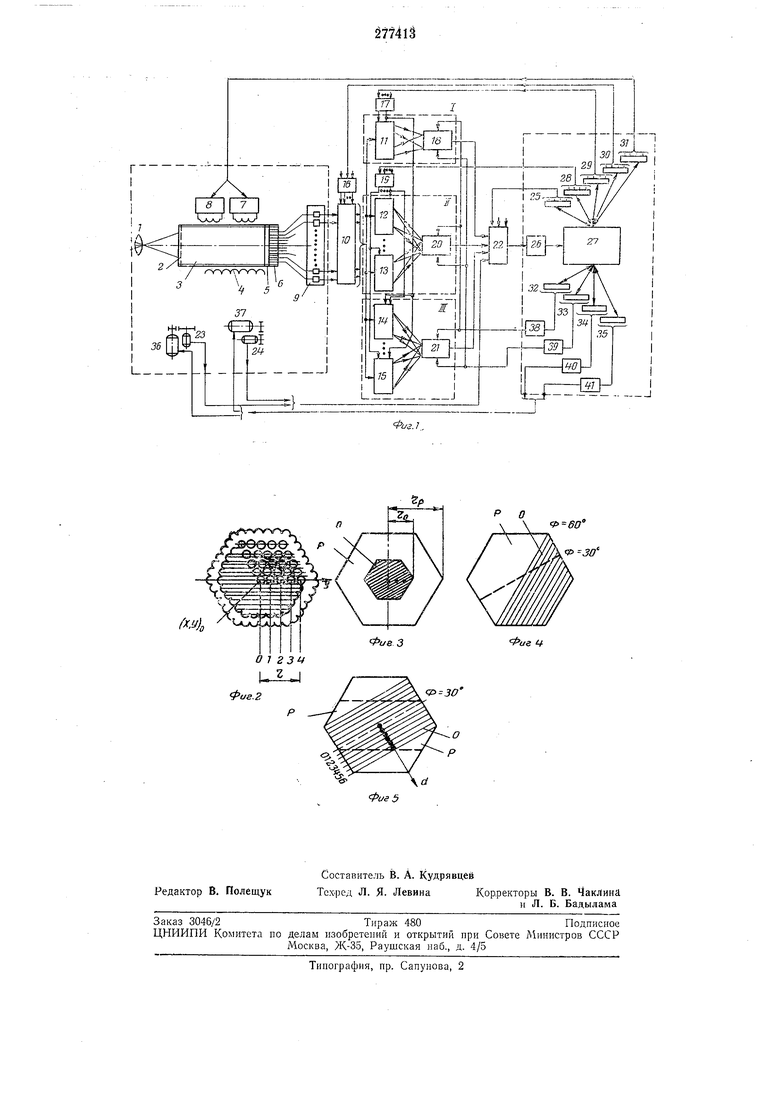
На фиг. 1 изображена общая блок-схема устройства; на фиг. 2 - схема топологической организации сигиал НЫХ цепей фильтра сетчатки; на фиг. 3- схема топологической организации сигнальных цепей фильтра детектора «закруглений ; на фиг. 4 - схема топологической организации сигнальных цепей фильтра детектора линейных участков и контурных точек на границе контраста; на фиг. 5- схема топологической организации сигнальных цепей фильтра детектора элементов полосы.
Объектив / проецирует оптическое изображение объекта на фотокатод 2 электроннооптического преобразователя или усилителя 3. Магнитное поле, создаваемое катушкой 4, фокусирует электронное изображение на слой малоинерционного люминофора 5 с внутренней стороны волоконной планщайбы 6. Генераторы 7, 8 ступенчатых адресных токов отклонения по А и У обеспечивают с помощью катушек перемещение электронного изображения относительно планшайбы. Группа стекловолокон переводит световой поток на матрицу светочувствительных элементов 9 с сохранением упорядоченности.
Сигнальные входные цепи фильтра сетчатки 10 соединены с сетчаткой 9, а выходные подсоединены параллельно ко входным цепям фильтров 11-15 детекторов элементов изображения. Соединения между сетчаткой и фильтрами сделаиы таким образом, что пространственная упорядоченность сигнальных цепей сохраняется (т. е. отношения между любыми парами элементов изображения, стекловолокон, сетчатки, цепей фильтров // - 15 остаются леизменными). Число сигнальных цепей, проходящих через фильтр сетчатки, равно числу (N) элементов сетчатки.
Цепи управляющих входов фильтра сетчатки 10 подсоединены к выходным цепям дещифратора 16 кода внешнего радиуса. Топологическая организация сигнальных цепей фИльтра сетчатки 10 показана на фиг. 2. Основными параметрами его являются положение (х, г/)э центрального элемента и радиус г
активной зоны (заштрихованная часть шестиугольника), ограничивающий число цепей, по которым входной сигнал проходит на фильтры //-15 детекторов элементов изображения.
Цепи управляющего входа фильтра // детектора / элементов изображения присоединены к выходным цепям дещифратора 17 кода внутреннего радиуса л,. Выходные цепи, число
которых равно 2N-k, объединены в две группы: {о} и {р} (см. фиг. 3), т. е. положительную и отрицательную. Каждая группа соединена с соответствующим входом решающего блока 18.
Фильтр 11 детектора элементов изображения состоит из 2() вентильных элементов, запирающие входы которых соединены с дешифратором 17 кода внутреннего радиуса Гп.
Число фильтров 12 И 13 детектора // элементов изображения пр-и гексогональной организации сетчатки равно трем или шести (по числу возможных ориентации). Каждый из них подключен к выходам фильтра сетчатки 10 и имеет сигнальные входы (Л цепей), управляющие входы, соединенные с дещифратором 19 кода ориентации, и выходы (;V цепей), сгруппированные в {о} и {р} группы
, N„,
(по - цепей), соединенные с соответствующими входами рещающего блока 20. Группировка выходных цепей фильтра определяется номером фильтра, т. е. направлением диаметра Ф, разделяющего цепи на группы
{о} и {р}. Так, для фильтра // (Ф 0о) все цепи, идущие от точек изображения, лежащих выше горизонтально проведенного диаметра (см. фиг. 4), образуют одну грунну, а остальные- другую. Схема фильтра 12 состоит из
Л вентильных элементов, каждый из которых имеет сигнальный и разрешающий входы. Все разрешающие в.ходы соединены между собой и управляются одной цепью, подключенной к соответствующему выходу дещифратора
19 кода ориентации.
Число фильтров 14 и 15 детектора /// элементов изображения равно числу фильтров детектора // (числу фиксируемых ориентации). Топологическая организация, т. е. принцнп разделения цепей на {о} и {р} группы, иллюстрируется фиг. 5, где заштрихована группа {о} цепей.
Входные цепи фильтров 14 и /5 полсоедийены к выходу фильтра сетчатки 10. Каждая сигнальная цепь фильтра 14 содержит элемент «И, разрешающий вход которого соединен с соответствующим выходолг .дешифратора 19 кода ориентации. Цумерация сигнальных цепей фильтров 14 и 15 определяется расстоянием d элемента от разделяющего диаметра Ф (см. фиг. 5). Выходные группы {о} и {р} цепей .подключены к соответствующим входам решающего блока 21. Переключатель 22 связан входными цепями с решающими блоками 18 20 и 21 детекторов I, II и /// элементов изображения и датчика- 5 ми 23 и 24 механических перемещений устройства обзора. Управляющие цепи переключателя связаны с выходом регистра 25 номера анализируемого параметра. Выход переключателя соединен со входом преобразователя ю 26 «аналог - код. В целом переключатель представляет собой комбинационную схему для подключения одной из входных цепей к выходу в зависимости от кодовой комбинации па управляющих входах.15 Вычислитель, например, цифровой. Основпым блоком его является цифровое вычислительное устройство 27, вход которого связан через преобразователь 26 с переключателем 22 анализируемых параметров.20 Выходами цифрового вычислительного устроиства являются регистры кодов, которые служат ячейками памяти для кодов анализируемого параметра 25, ориентации Ф 28, внутреннего радиуса (го) 29, внешнего радиуса25 (г) 30, координат центра (х, г/)о 31, числа элементов в (о) группе (Ло) 32, числа элементов в {р} группе (Nf) 33, величин управляющего воздействия 34, S5 на двигатели сервопривода 36 и 37.30 Преобразователи 38-41 «код-аналог подключены ко входам решающих блоков 18, 20 и 21 детекторов Д // и /// элементов изображения и исполнительным механизмам серволривода.35 Работа устройства основана на следующем принципе. Фильтр сетчатки «вырезает из всего изображения, записанного на сетчатке, компактный участок в форме шестиугольника, располо/кенного в центре сетчатки (см.40 фиг. 2). Положение центра (к, у)о этого активного участка, а также его размер, т. е радиус г могут изменяться при воздействии управляющих сигналов на генераторы 7 и 8 отклоняющих токов п дешифратор 16 кода внешнего радиуса фильтра сетчатки 10. Фильтры детекторов /, // и /// элементов изображения делят активный участок на две зоны: положительную {о} и отрицательную {р}, границы которых определяются тнном о детектора и значением параметров фильтров, причем тип детектора и значение параметров фильтров могут изменяться при воздействии управляющих сигналов на переключатель 22 и дешифраторы 17 и 19 фильтров детекторов55 элементов изображения. Яркостные сигналы, собираемые с каждой зоны {о} и {р} раздельно, усредняются и сравниваются между собой. Разностный сигнал R, т. е. реакция детектора, определяется соотношением темныхgg и светлых элементов в {о} -и {р} зонах анализируемого участка. Очевидно, что при равномерной освещенности активного участка реакмаксимальной величины сигнал R достигает тогда, когда границы зон {о} и {р}, определяемые значениями метрических параметров фильтров, совпадают с границами контраста в локальном участке изображения, Таким образом, задача выделения локального признака (элемента) сводится к нахол дению максимума функции R(z), где z - значения параметров фильтров на локальном участке изооражения. Экстремнзация осуществляется самонастройкой (подбором значеДетекторы Д // и /// предпазначены для выделения разных элементов изображения, в частности, детектор / - для выделения граничных эле.ментов типа «закругление, детектор // - для селекции линейных граничных участков и контурных точек на границе контраста, детектор III - для выделения элементов полосы. Фильтр сетчатки управляется дешифратором 16. Сигнал, поданный на один из управляющих выходов 1, 2, 3,..., п-1 фильтра сетчатки 10, блокирует сигналы, проходящие по цепям от всех тех элементов сетчатки, расстояние которых от центрального элемента более 1ем 2, 3, 4,..., п соответственно. На выход фильтра сигналы пропускаются только по цепям, идущим от активного участка. Последовательное включение фильтра Сетчатки и фильтра -11 детектора / элементов изображения обеспечивает разделение всего активного пучка сигнальных цепей на две группы, одна из которых соответствует круглой (шестиугольной) центральной зоне (о), а другая - кольцеобразная - периферической {р}. При этом отношение .мелчду радиусами активного участка г и центральной зоны ло постоянно. Фильтры 12 и 13 детектора // элементов изображения включаются по одному. При это.м управляющий сигнал подается с выхода дешифратора 19 кода ориентации на соответствующий фильтр, открывая входному сигналу доступ ко входа.м решающего блока. Остальные фильтры остаются запертыми. Коммутация, т. е. груипнровка, цепей фильтров детектора П неизменна - изменяются только пара тры; размер активной зоны и ориентация разделяющего диаметра. Фильтры 14 и 15 детектора /// элементов изображения работают иопеременно, т. е. открывается то.тько одни из фильтров .с нужной ориентацией. Управляющие сигпалы при этом ноступают с дешифратора 19 кода ориентации. Однако в отличие от фильтров i2 и 13 детектора // здесь происходит еще и коммутация цепей в зависимости от размера зон {) (Р}- разделения активного участка на «полосообразную центральную часть и две «сегментовидные периферические части при условии, что размеры этих частей изменяются,
Решающие блоки
детекторов вычисляют
функцию / log , где |3о и Рр -усред
ненные по зонам {о} и {р} значения яркостного сигнала. Выбор функции R может быть в нринципе иным, например таким:
1% -fp
R og S,
В целом последовательность работы устройства такова: ноиск и выделение граничного элемента, локальный анализ окрестностей граничного элемента и онознание тина локального признака изобра}кения, выделение и описание найденного локального элемента (нризн.ака).
Поиск граничного элемеита нроизводится с помощью детектора / элементов нзображения. Параметры поиска, а именно тин траектории активного участка по изображению и параметры этого движения, а также размер активной зоны задаются априорно на основании опыта или получаются случайным образом. Значения этих.параметров задаются засылкой соответствующих кодов па выходные регистры вычислителя. На регистр 25 засылается «1, и выход блока 18 детектора / нодключается к преобразователю 26. На регистры 29 и 30 засылаются коды величин Гц и г, и дешифраторы 16 и 17 возбуждают соответствующие управляющие цепи фильтров 10 и 11, выделяя активный участок сетчатки и разбивая его па зоны {о} и {р}. На регистры координат засылаются начальные значения координат X и F.
В режиме поиска активный участок передвигается по изображению. При этом на регистр 31 координат центра каждый раз засылаются новые значения X и У, и на каждом щаге анализируется выходной сигнал R детектора / элементов изображения. Если R меньше некоторого порога б, ноиск продолжается, если , лачипается выделение граничного элемента, для чего сначала запоминаются значение R и координаты центра (х, у). Далее в окрестностях обпаружеппой точки (х,у)о находится новая точка, в которой сигнал Л больше, чем в любой из точек окрестпости. Теперь центром становится новая найденная точка, И в ее окрестностях снова идет поиск точки с максимальным R. Такая процедура самонастройки -идет до тех пор, пока Rma. пе перестанет увеличиваться.
Далее следуют пробные изменения размеров Го и г. Сначала Го уменьшается на единицу и происходит самонастройка но ноложению. Увеличение тах служит признаком того, что ИЗ {о} и {р} исключаются посторонние участки. Подстройка по (х, у)о и /о продолжается до тех пор, пока не нерестанет расти.
Обе эти процедуры самонастройки, нри которых управление параметрами фильтров ведется по информационной обратной связи от
регистров 29-31, приводят к выделению граничного элемента. Далее исследуется окрестность выделенного граничного элемента, для чего от центра (х, у)д совершаются несколько шагов в каждом нанравлении (0°, 30°, 60°...); анализ приращений Д/ и его знака на каждом направлении дает возможность описать локальную конфигурацию и опознать элемент изображения, например «нятно, «закруглеиие, «элемент полосы, «элемепт края и т. д. Значение Rmix в точке локального максимума характеризует локальный контраст на границе.
Если найденный с номощью детектора //
элементов изображения локальный признак отнесен к классу «элемент полосы, то многоканальный переключатель 22 переводят в другое положение, и выход решающего блока 21 детектора /// подключается ко входу вычислителя.
Фильтры детектора /// элементов изображения настраивают также с номощью информационных обратных связей от регистров кодов размеров 29 и 30, ноложения 31 и ориентации 28 до соответствующих исполнительных узлов. Оптимальное сочетание этих параметров дает максимальиый выходной сигнал детектора ///.
В результате разделения с помощью детектора // и /// темных и светлых областей на локальном участке изображения возможно обоснованное унравление размерами зон, т. е.
объемом выборки. Например, при небольшом
уровне разностного сигиала г. соизмеримом.
Р
с отношением сигнал : шум, можно увеличить размер активного участка сетчатки и зон {о} и {р} (при этом падает разрешающая
способиость устройства). Для большого входного сигнала можно уменьшать чувствительность, т. е. размер зои .накопления, иовышая разрешающую способность. Для механического сканирования изображения (кадра) используется сервопривод, содержащий исполнительные электромеханические двигатели 36 и 37 с датчиками перемещеннй 23 и 24, подключаемыми через переключатель 22 ко входу вычислителя. Управляющие сканированием сигналы из выходных регистров вычислителя подаются через преобразователи 40 и 41 на двигатели 36 и 37.
Предмет изобретения
1. Устройство для анализа изображений, содержаи;ее объектив, электронно-оптический преобразователь с отклоняющей системой и выходной волокоиной иланщайбой, матрицу светочувствительных элементов, сервопривод
сканирования изображения с двигателями и датчиками перемещения устройства, отличающееся тем, что, с целью увеличения надежности анализа многотоновых, контурных и силуэтных .изображений в условиях щумов, оно
текторы элементов изображения, дешифраторы кодов, .переключатель и вычислитель, причем сигнальные входы фильтра сетчатки подключены к выходам матрицы .светочувствительных элементов, а управляющие входы- к выходам соответствующего дешифратора кода; сигнальные входы детекторов элементов изображения соединены с выходами фильтра сетчатки, управляющие входы - с выходами соответствующих дешифраторов кодов, а выходы- через переключатель ко входу вычислителя, выходы которого подключены к управляющим входам отклоняющей системы, дешифраторов кодов, переключателя, рещающих
устройств детекторов элементов изображения, двигателей сервопривода сканирования, датчики перемещения устройства подключены к соответствующим входам переключателя.
2. Устройство по п. 1, отличающееся тем, что, с целью выделения характерных локальных признаков изображения, выходы каждого фильтра детекторов элементов изображения объединены в группы, соответствующие одной из двух зон активного участка матрицы светочувствительных элементов, при этом каждая группа подключена к соответствующему сигнальному входу решающих блоков. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АНАЛИЗА ОБЪЕКТОВ ПО ОПТИЧЕСКОМУ ИЗОБРАЖЕНИЮ | 1971 |
|
SU294145A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| РАДИОЛИНИЯ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2009 |
|
RU2411663C1 |
| СИСТЕМА РАДИОВЕЩАНИЯ | 2012 |
|
RU2490800C1 |
| Устройство для измерения мощности цилиндров двигателя внутреннего сгорания | 1990 |
|
SU1789898A1 |
| Радиолиния, защищенная от несанкционированного доступа | 2023 |
|
RU2820855C1 |
ЗО