Известен электрогидравлический привод с упругой силовой передачей от вала исполнительного механизма к нагрузке, предназначенный, например, для управления положением аэродинамического руля летательного аппарата.
В описываемом приводе осуществляется демпфирование резонанса амплитудно-частотной характеристики, чем достигается улучшение динамических характеристик привода.
Существенно новым в приводе является введение в электрическую схему привода дополнительного потенциометра, движок которого связан с нагрузкой, и двух корректирующих цепочек.
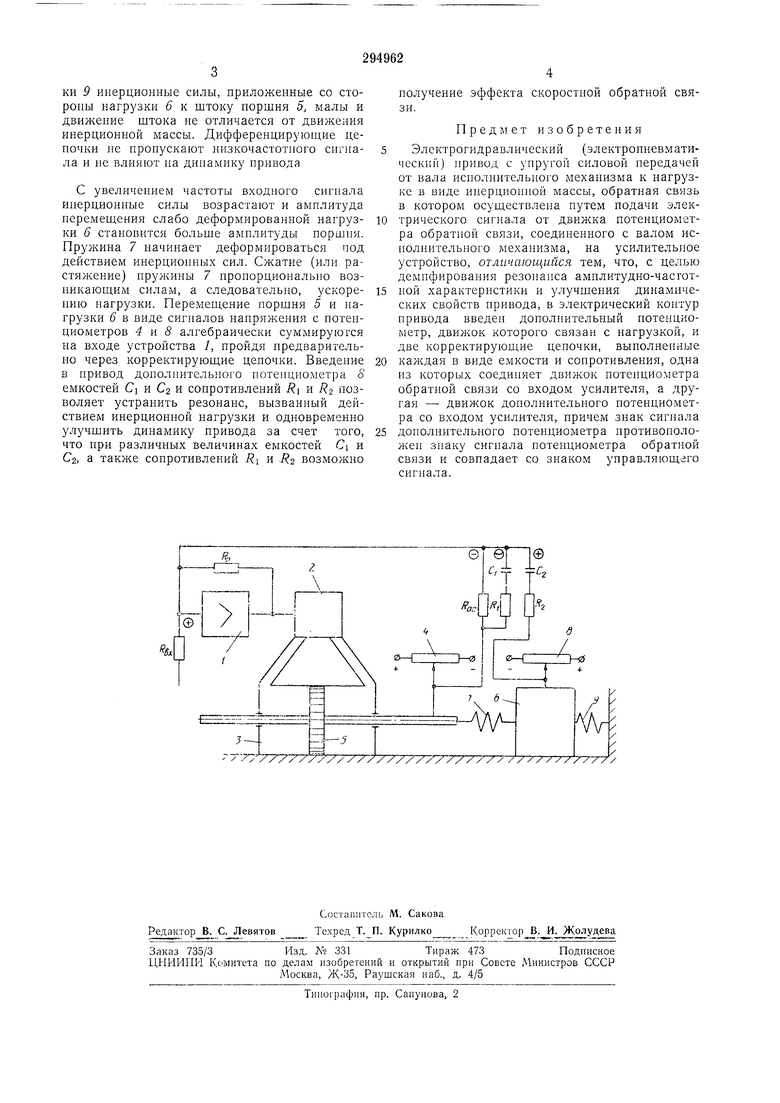
Па чертеже изображена принципиальная схема электрогидравлического (электроппевматического) привода.
Сигнал с выхода усилительного устройства 1 подается на вход управляющего устройства 2, например, золотникового или струйного типа, подающего рабочее тело (жидкость или газ) в полости цилиндра 3. Сигнал с потенциометра 4, движок которого связан с порщнем 5, подается через сопротивление ос и первую корректирующую цепочку tCi на вход усилительного устройства. Порщень 5 связан с инерционной нагрузкой 6 упругой силовой передачей, выполненной, например, в виде пружины 7.
Движок дополнительного потенциометра 8 связан с нагрузкой 6, и сигнал с него через вторую корректирующую цепочку также подается на вход усилительного устройства.
Сигналы от обоих потенциометров 4 и 8 поступают на вход усилительного устройства с разными знаками. Знак сигнала потенциометра 8 совпадает со знаком входного сигнала привода. Внещняя пружинная нагрузка выполнена в виде пружины 9.
Привод работает следующим образом.
Входной сигнал суммируется на устройстве У с сигналами обратной связи, поступающими от движков потенциометров 4 и 8. Образующийся па выходе усилителя сигпал рассогласования отклоняет чувствительный элемент управляющего устройства 2 от нулевого полол ения, в результате чего рабочее тело поступает в одпу из полостей силового цилиндра 3.
Сигнал с двилчка потенциометра 4 поступает через сопротивление и первую корректирующую цепочку поступает на вход устройства /.
Сигнал с движка потенциометра 8 через вторую корректирующую цепочку также поступает на вход устройства /.
ки 9 инерционные силы, приложенные со стороны нагрузки 6 к штоку норшня 5, малы и движение ш;тока не отличается от движения инерционной массы. Дифференцирующие цепочки не нронускают низкочастотпого сигнала и не влияют на динамику привода
С увеличением частоты входного сигнала инерционные силы возрастают и амплитуда неремещения слабо деформированной нагрузки 6 становится больше амнлитуды поршня. Пружина 7 начинает деформироваться под действием инерционных сил. Сжатие (или растяжение) нружины 7 пропорционально возникающим силам, а следовательно, ускорению нагрузки. Перемещение поршня 5 и нагрузки 6 в виде сигналов папряжения с потенциометров 4 и 8 алгебраически суммируются па входе устройства /, пройдя предварительно через корректирующие цепочки. Введение в привод дополннтельногО нотенциометра о емкостей Cj и С2 и сопротивлений Ri и 2 позволяет устранить резонанс, вызванный действием инерционной нагрузки и одновременно улучшить динамику привода за счет того, что при различных величинах емкостей Ci и Сг, а также сопротивлений Ri и R2 возможно
нолучение эффекта скоростной обратной связи.
Предмет изобретения
Электрогидравлический (электронневматический) привод с упругой силовой передачей от вала исполнительного механизма к пагрузке в виде инерционной массы, обратная связь в котором осуществлена путем подачи электрического сигнала от двилска потенциометра обратной связи, соединенного с валом иснолнительпого механизма, на усилительное устройство, отличающийся тем, что, с целью демпфирования резонанса амплитудно-часготной характеристики и улучшения динамических свойств привода, в электрический контур привода введеп дополнительный потенциометр, движок которого связан с нагрузкой, и две корректирующие ценочки, выполненные
каждая в виде емкости и сонротивления, одна из которых соединяет движок потенциометра обратной связи со входом усилителя, а другая - движок дополнительного потенциометра со входом усилителя, причем знак сигнала
дополнительного потенциометра противоположен знаку сигнала нотепциометра обратной связи и совпадает со знаком управляющего сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ | 1969 |
|
SU257367A1 |
| РЕГУЛИРУЕМЫЙ ФИЛЬТР НИЖНИХ ЧАСТОТ | 1973 |
|
SU379973A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ СИГНАЛА О САМОПРОИЗВОЛЬНОМ ДВИЖЕНИИ НАПРАВЯЮЩЕГО АППАРАТА ГИДРОАГРЕГАТА | 1966 |
|
SU222499A1 |
| СПОСОБ ОЦЕНКИ КОЭФФИЦИЕНТА ПЕРЕДАЧИ ЦЕПИ ПОТЕНЦИОМЕТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2236668C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| АВТОГЕНЕРАТОРНЫЙ УСИЛИТЕЛЬ ПОСТОЯННОГО ТОКА С СИММЕТРИЧНОЙ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ | 1967 |
|
SU197692A1 |
| Магнитная опора | 1981 |
|
SU1028714A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ РАЗГОНА ТУРБОНАГНЕТАТЕЛЯ | 1968 |
|
SU209917A1 |
| Регулятор переменного напряжения | 1980 |
|
SU904186A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1970 |
|
SU276206A1 |
