Известны приводы малых перемещений, где приводимый рабочий орган, например шлифовальная бабка, непосредственно контактирует с регулируемым упором - магнитострикциовным стержнем. В результате такого контакта возможна деформация магнитострикционного стержня, что в случае малых перемещений (порядка нескольких микрон) недопустимо.
Целью изобретения является повышение точности пере.мещений.
Это достигается тем, что между рабочим органом станка и магнитострикционным стержнем установлен промежуточный палец, жестко фиксируемый на время перестановки регулируемого стержня на заданную величину.
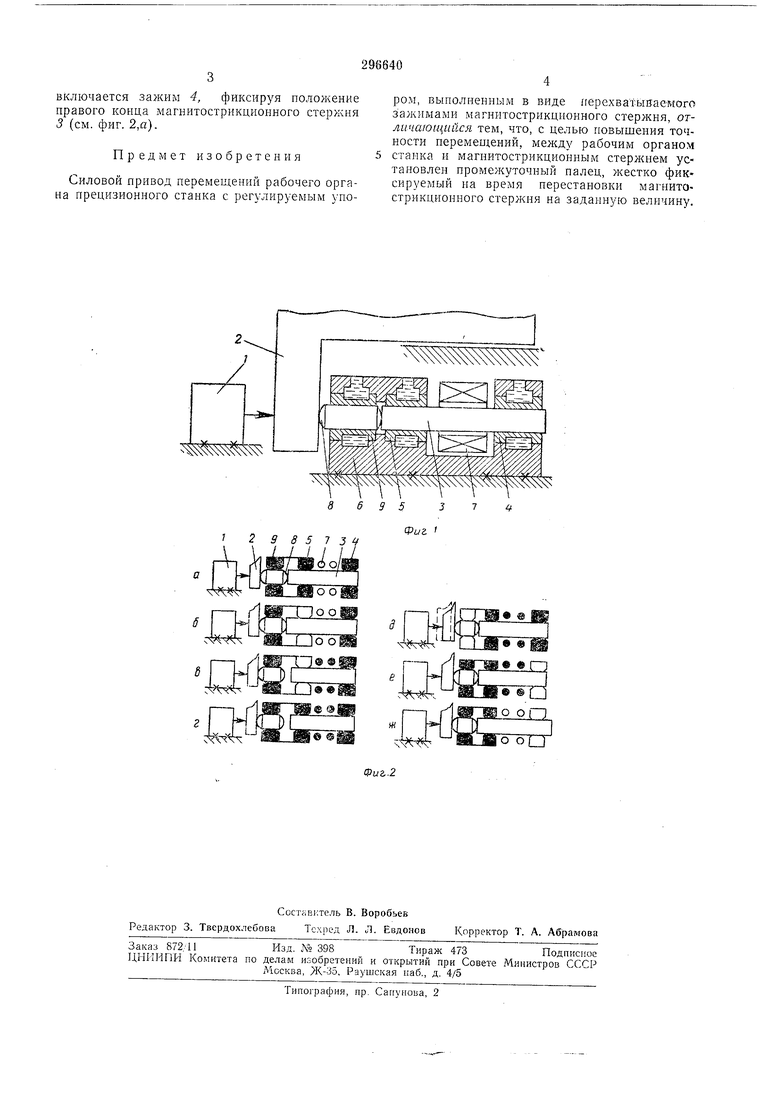
На фиг. 1 представлена схема предлагаемого силового привода; на фиг. 2 - схема управления импульсными перемещениями шлифовальной бабки.
Привод состоит из силового органа /, например гидравлического, связанного с рабочим органом 2 станка, из регулируемого, например магнитострикционного, унора 3 с зажимами 4 и 5, например гидравлическими, размещенными в корпусе 6, электромагнитной катушки 7 и промежуточного пальца 8 с зажимом 9. На фиг. 2 условно зачерненные прямоугольники и кружки обозначают соответственно включенные зажимы и замкнутую цепь электромагнитной катущки. Выключенные зажимы и
обесточенная катушка обозначены незачерненными фигурами.
В исходном положении силового привода пеперед началом цикла перестановки (см. фиг. 2,а)
зажимы 4, 5 и 9 включены. Жесткий промежуточный палец 8 при этом фиксирует положение рабочего органа 2 станка. Электромагнитная катушка выключена. Перестановка рабочего органа осуществляется в следующей последовательности. Сначала выключается зажим 5, освобождая левый конец магнитострпкционного стержня 3 (см. фиг. 2,6). Затем включается электромагнитная катушка 7, и магнитострикционный стержень 3 ускорачивается, перемещая влево свободный торец (см. фиг. 2,0). После этого включается зажим 5, фиксируя положение торца упора после перестановки (см. фиг. 2,г). Зажим 9 также включается (см. фиг. 2,д), освобождая промежуточный стержень, и рабочий орган станка под действием силового органа / перемешается до торца регулируемого стержня 3.
На фиг. 2,е показано включение зажима 9, фиксирующего положение рабочего органа 2
станка после перестановки. Одновременно выключается зажим 4, освобождая правый конец магнитострикционного стержня 3. Затем включается электромагнитная катушка 7, и магнитострикционный стержень 3 восстанавливает
включается зажим 4, фиксируя положение правого конца магнитострикционного стержня 5 (см. фиг. 2,и).
Предмет изобретения
Силовой привод перемещений рабочего органа прецизионного станка с регулируемым упором, выполненным в виде перехватываемого зажимами магнитострикцнонного стержня, отличающийся тем, что, с целью повышения точности перемещений, между рабочим органом станка и магиитострикционным стерл нем установлен промежуточный палец, жестко фиксируемый на время перестановки магиитострикционного стержня на заданную величину.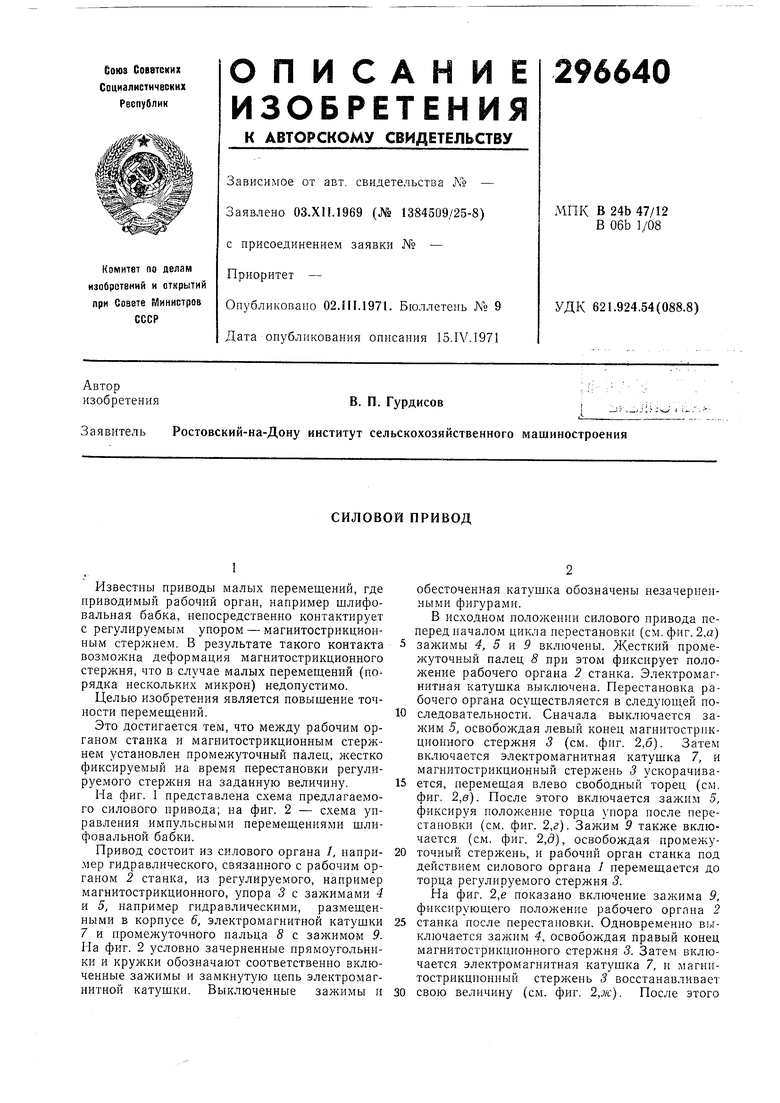
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОСТРНКДИОННЬШ ПРИВОД | 1967 |
|
SU199614A1 |
| Способ точной подачи исполнительных органов, например, металлорежущих станков | 1960 |
|
SU132037A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРИВОД МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1972 |
|
SU428910A1 |
| МАГНИТОСТРИКЦИОННОЕ УСТРОЙСТВО | 1971 |
|
SU299343A1 |
| МАГНИТОСТРИКЦИОННЫЙ МИКРОСХВАТ | 2009 |
|
RU2417877C1 |
| СПОСОБ РАЗВИТИЯ И ПОДДЕРЖАНИЯ АДАПТАЦИОННОЙ РЕАКЦИЙ ОРГАНИЗМА НА ВЛИЯНИЕ НЕБЛАГОПРИЯТНЫХ ФАКТОРОВ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2100998C1 |
| ЭЛЕКТРИЧЕСКИЙ ИНСТРУМЕНТ | 2010 |
|
RU2529434C2 |
| Устройство для гибки обечаек из листовых заготовок | 1977 |
|
SU710725A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЦИЛИНДРОВ | 2010 |
|
RU2529695C2 |
| МАГНИТОСТРИКЦИОННЫЙ ПРИВОД ШАГОВЫХ ПЕРЕМЕЩЕНИЙ | 1970 |
|
SU265751A1 |
;xW
