Изобретение относится к области микроробототехники и может быть использовано в качестве захватного устройства микроманипулятора.
Известен пьзоэлектрический схват, содержащий основу схвата, тяги и пьезоприводы, к основе схвата одним концом жестко прикреплен пьезопривод, а второй конец пьезопривода соединен с тягой при помощи скобы, соединение выполнено с возможностью скольжения тяги вдоль пьезопривода, и тяги прикреплены к основе схвата при помощи винта, причем пьезопривод выполнен в виде плоских пьезоэлектрических элементов [патент РФ №2172239, кл. B25J 7/00, опубл. 20.08.2001, БИ №23].
Основным недостатком данного устройства является наличие механических передач. У данного устройства также неудовлетворительные массовые и габаритные характеристики (натурный образец в длине составляет около 100 мм, ширине - 30 мм).
Известен также электростатический микросхват, содержащий основу, корпус, зажимные пальцы из электроизоляционного материала, приводы, выполненные в виде электростатических преобразователей, содержащих подвижную и неподвижную электропроводниковые плоскопараллельные пластины со слоем упругого диэлектрика между ними [патент РФ №2266190, кл. B25J 7/00, опубл. 20.12.2005, БИ №35].
Основным недостатком данного устройства являются низкие по величине значения сил, развиваемых приводами микросхвата для зажима и удержания микрообъектов.
Наиболее близким по технической сущности к заявляемому изобретению является схват микроманипулятора, содержащий основу схвата, кисть схвата, упругодеформируемые зажимные пальцы, привод, выполненный в виде линейного электромагнитного двигателя, содержащего якорь из ферромагнитного материала и единственную систему обмоток электромагнита, тягу, выполненную в виде выдвижного звена с трубчатым концом, причем якорь линейного электродвигателя жестко соединяет основу схвата с кистью, к которой жестко закреплены зажимные пальцы, связанные между собой возвратной пружиной, а обмотка электромагнита установлена в выдвижном звене, расположенном коаксиально с якорем и кистью схвата [патент РФ №2259915, кл. B25J 7/00, опубл. 10.09.2005, БИ №25].
Основным недостатком прототипа является сложность регулирования величины отклонения зажимных пальцев при реализации операции захвата микрообъектов. Фактически, схват микроманипулятора обеспечивает только два возможных крайних положения зажимных пальцев - пальцы либо полностью сведены, либо разомкнуты. Это не позволяет контролировать усилие захвата и удержания, и, как следствие, возможны случайные деформации и повреждения структуры микрообъектов. Также следует отметить, что у прототипа отсутствуют средства силового очувствления для контроля за операциями захвата-выпускания микрообъектов.
Задачей, на решение которой направлено заявляемое изобретение, является улучшение эксплуатационных характеристик, связанное с возможностью простого регулирования величины отклонения зажимных пальцев, а также обеспечение силового очувствления микросхвата.
Решение поставленной задачи достигается тем, что в магнитострикционном микросхвате, содержащем корпус схвата, зажимные пальцы, привод, согласно изобретению привод состоит из магнитострикционного стержня, помещенного в намагничивающую катушку, один конец стержня свободен и проходит через отверстие в магнитопроводящем корпусе схвата, к свободному концу жестко закреплен подвижный палец схвата, а другой конец стержня жестко закреплен в немагнитном фланце, установленном в корпусе схвата, второй палец схвата выполнен неподвижным, жестко закрепленным к корпусу схвата и имеет упор, ограничивающий линейное перемещение подвижного пальца, в упор установлен пьезоэлектрический датчик.
На чертеже представлена конструкция магнитострикционного микросхвата.
Магнитострикционный микросхват (чертеж) содержит корпус 1 микросхвата, привод, состоящий из магнитострикционного стержня 2, помещенного в намагничивающую катушку 3, один конец стержня 2 свободен и проходит через отверстие в магнитопроводящем корпусе 1 схвата, к свободному концу жестко закреплен подвижный палец 4 схвата, а другой конец стержня жестко закреплен в немагнитном фланце 5, установленном в корпусе 1 схвата, второй палец 6 схвата выполнен неподвижным, жестко закрепленным к корпусу 1 схвата и имеет упор 7, ограничивающий линейное перемещение подвижного пальца 4, в упор 7 установлен пьезоэлектрический датчик 8. Микрообъект 9 удерживается подвижным 4 и неподвижным 5 пальцами микросхвата.
Магнитострикционный микросхват работает следующим образом.
При подключении намагничивающей катушки 3 к источнику постоянного тока по магнитной цепи, образованной корпусом 1 и стержнем 2 (т.к. фланец 5 изготовлен из немагнитного материала), проходит магнитный поток, под действием которого магнитострикционный стержень 2 с рабочей длиной l удлиняется на Δl, перемещая свободный конец подвижного пальца 4 схвата также на Δl, что позволяет реализовать операцию захвата микрообъекта 9. Микрообъект 9 зажимается подвижным пальцем 4 и упором 7 неподвижного пальца 6 микросхвата. Величина силы зажатия микрообъекта 9 контролируется пьезоэлектрическим датчиком 8.
Операция выпускания микрообъекта реализуется снятием магнитного поля путем отключения источника постоянного тока. При этом рабочая длина магнитострикционного стержня укорачивается на Δl до исходной величины l, и микрообъект падает под действием силы тяжести.
Следует отметить, что величина перемещения свободного конца подвижного пальца может изменяться простым регулированием величины постоянного тока. Вместе с сигналом пьезоэлектрического датчика это позволяет реализовать контур управления микросхватом для предотвращения случайных разрушений и повреждений структуры микрообъектов.
Таким образом, заявляемое изобретение позволяет улучшить эксплуатационные характеристики микросхвата, связанные с возможностью простого регулирования величины отклонения зажимных пальцев, а также обеспечить силовое очувствление микросхвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2009 |
|
RU2417876C1 |
| БИМЕТАЛЛИЧЕСКИЙ МИКРОСХВАТ | 2009 |
|
RU2417878C1 |
| МИКРОСХВАТ С СИЛОВЫМ ОЧУВСТВЛЕНИЕМ | 2004 |
|
RU2261170C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2004 |
|
RU2266190C1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОМАНИПУЛЯТОРА | 2006 |
|
RU2331505C1 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРООБЪЕКТАМИ, ИЗГОТОВЛЕННЫМИ ИЗ ЭЛЕКТРОПРОВОДНИКОВЫХ МАТЕРИАЛОВ | 2009 |
|
RU2423223C1 |
| КАПИЛЛЯРНЫЙ МИКРОЗАХВАТ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2261795C1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| МЕХАТРОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СХВАТ | 2010 |
|
RU2425747C1 |
Изобретение относится к области микроробототехники и может быть использовано в качестве захватного устройства микроманипулятора. Магнитострикционный микросхват содержит корпус схвата, зажимные пальцы и привод. При этом привод состоит из магнитострикционного стержня, помещенного в намагничивающую катушку, один конец которого свободен и проходит через отверстие в магнитопроводящем корпусе схвата. К свободному концу стержня жестко закреплен подвижный палец схвата, а другой конец стержня жестко закреплен в немагнитном фланце, установленном в корпусе схвата. Второй палец схвата выполнен неподвижным, жестко закрепленным к корпусу схвата и имеет ограничивающий линейное перемещение подвижного пальца упор, в котором установлен пьезоэлектрический датчик. Изобретение позволяет улучшить эксплуатационные характеристики, связанные с возможностью простого регулирования величины отклонения зажимных пальцев, а также обеспечить силовое очувствление микросхвата. 1 ил.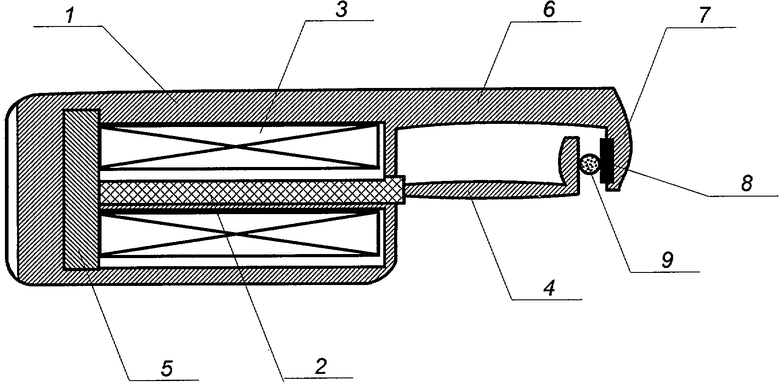
Магнитострикционный микросхват, содержащий корпус схвата, зажимные пальцы, привод, отличающийся тем, что привод состоит из магнитострикционного стержня, помещенного в намагничивающую катушку, один конец которого свободен и проходит через отверстие в магнитопроводящем корпусе схвата, причем к свободному концу стержня жестко закреплен подвижный палец схвата, а другой конец стержня жестко закреплен в немагнитном фланце, установленном в корпусе схвата, при этом второй палец схвата выполнен неподвижным, жестко закрепленным к корпусу схвата, и имеет ограничивающий линейное перемещение подвижного пальца упор, в котором установлен пьезоэлектрический датчик.
| МИКРОСХВАТ С СИЛОВЫМ ОЧУВСТВЛЕНИЕМ | 2004 |
|
RU2261170C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2004 |
|
RU2266190C1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |

