(54) УСТРОЙСТВО ДЛЯ ГИБКИ ОЁЕЧАЕК ИЗ ЛИСТОВОГО МАТЕРИАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гибки обечаек из листовых заготовок | 1978 |
|
SU770609A2 |
| Устройство для гибки обечаек из листовых заготовок | 1976 |
|
SU612732A1 |
| Устройство для свертывания конических обечаек | 1973 |
|
SU482228A1 |
| Приспособление для сведения краев обечайки | 1973 |
|
SU556875A1 |
| Устройство для гибки обечаек из листовых заготовок | 1982 |
|
SU1015967A1 |
| Устройство для свертывания кони-чЕСКиХ ОбЕчАЕК | 1975 |
|
SU795627A1 |
| Устройство для гибки обечаек из листовых заготовок | 1982 |
|
SU1061883A2 |
| Устройство для гибки обечаек из листовых заготовок | 1982 |
|
SU1074622A2 |
| ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2006 |
|
RU2310305C1 |
| Станок для растяжки и формовки обмоток электрических машин из лодочки в секцию | 1989 |
|
SU1737637A1 |
Изобретение относится к обработке металлов давлением, в частности к гибке листовых заготовок, и может быть использовано-в химическом и нефтяном аппаратостроении, целлюлознобумажном машиностроении и других отраслях -промышленности.
Известно устройство для гибки обечаек из листовых заготовок, содержащее два рабочих узла с зажимными органами, имеющими возможность поворота вокруг своих продольных осей ), один из рабочих узлов в лполнен с возможностью относительного перемещения в направлении другого и жестко связан с тяговым органом.
однако Р известнся у;тройстве изза наличия отдельного привода сближения рабочих органов, тяговьлй орган которого жестко сгзязан с подвижным корпусом, и приводов поворота рабочих органов, кинематически не связанных с приводом сближения рабочих органов, весьма трудно обеспечить согласрванног сближение п поворот рабочих органов в процессе гибки для получения обечаек правильной цилиндрической формьа. РЗследствие этого возможна несогласонзнность сближения
рабочих органов с их поворотом в процессе гибки заготовки, что приводит к нарушению геометрически правильной формы цилиндрической обечайки и, следовательно, к снижению качества гибки,
Цель изобретения - улучшение качества гибки путем обеспечения соi-ласованности поступательного и поворотного движения зажимного органа рабочего узла в процессе гибки.
Для этого привод тягового органа снабжен цепью управления с конечным выключателем, установленным в корпусе подвижного рабочего узла, а тяговый орган - стержнем, свободно установленмым в отБерс-1ИИ, выполненном в стенке корпуса, и несущим расположенные по обе его стороны ynoptj, один из которых Еютолнен взаимодействующим с конечным выключателем, а второй установлен от него на расстоян-с . -вспечивающем свободный ход К;-. , лреьыиаюсций ход конечного выключателя.
Для обеспечения принудительного сближения(рабочих узлов в конечный момент гибки в tienH управления приводом параллельно контактам конечного внключателя установлена пусковая (снопка.
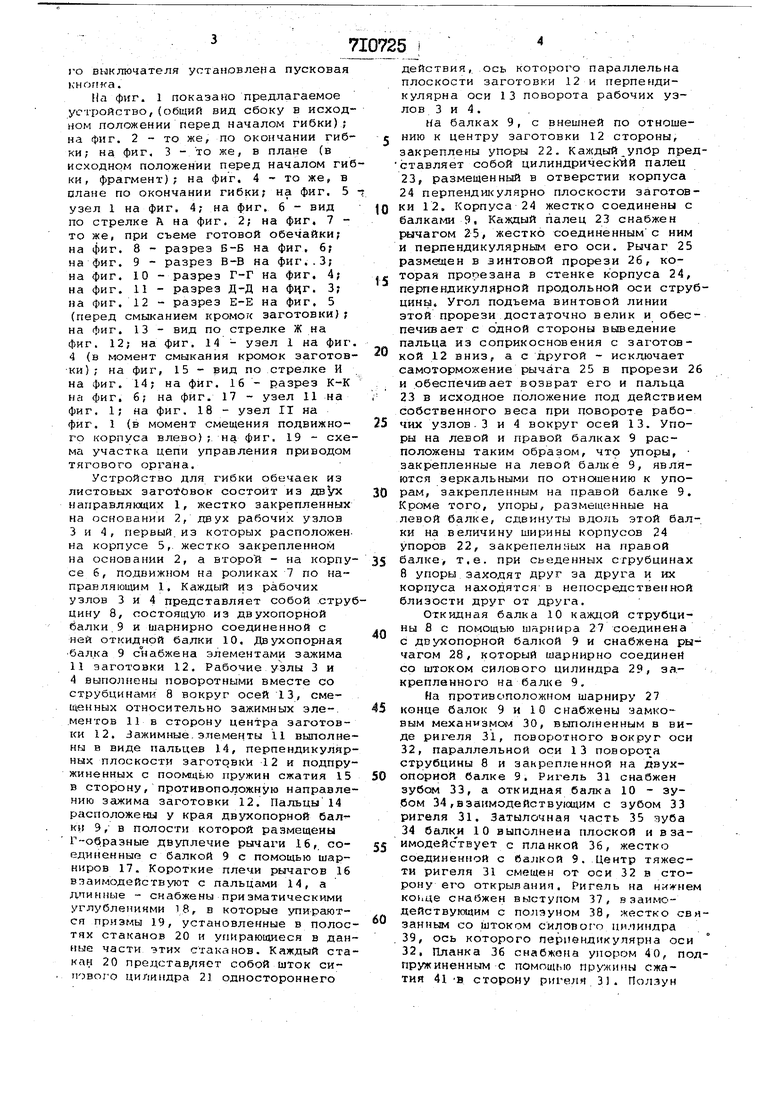
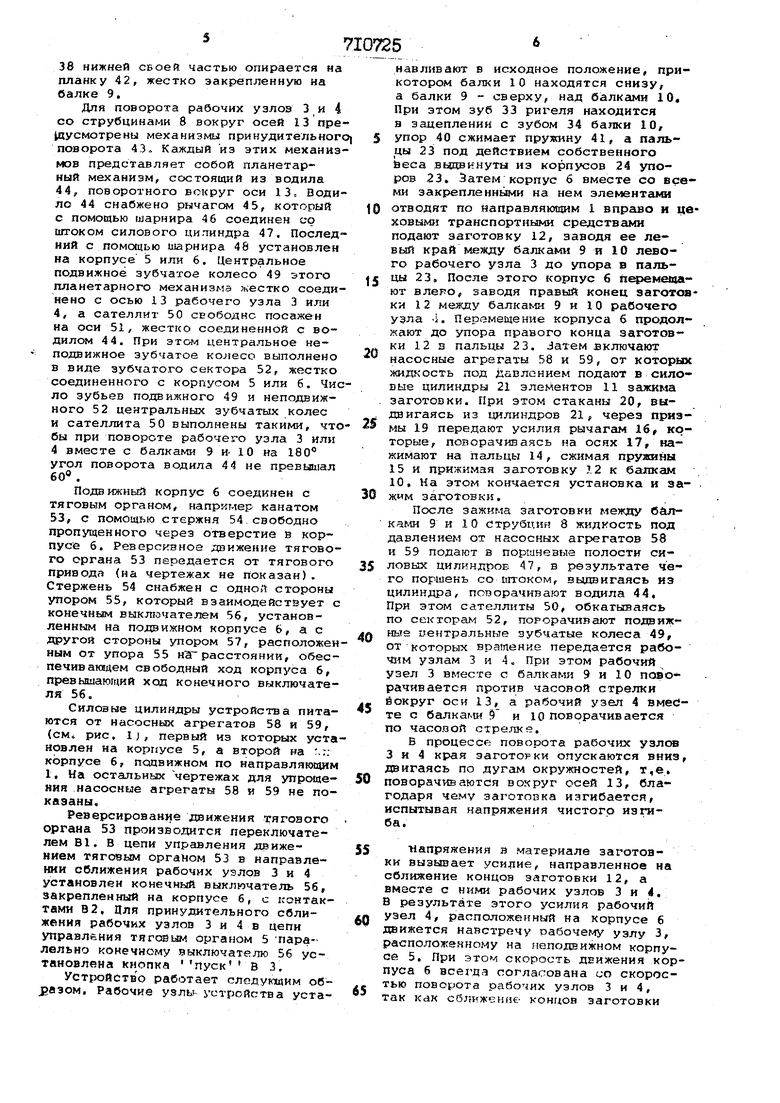
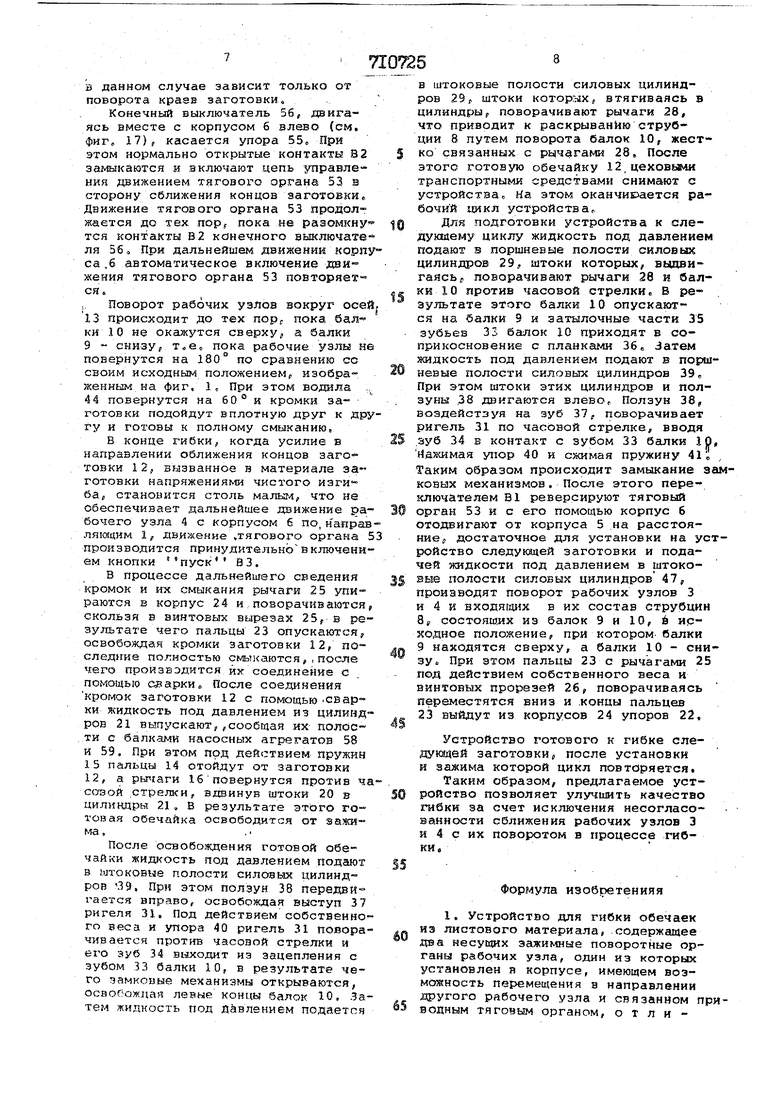
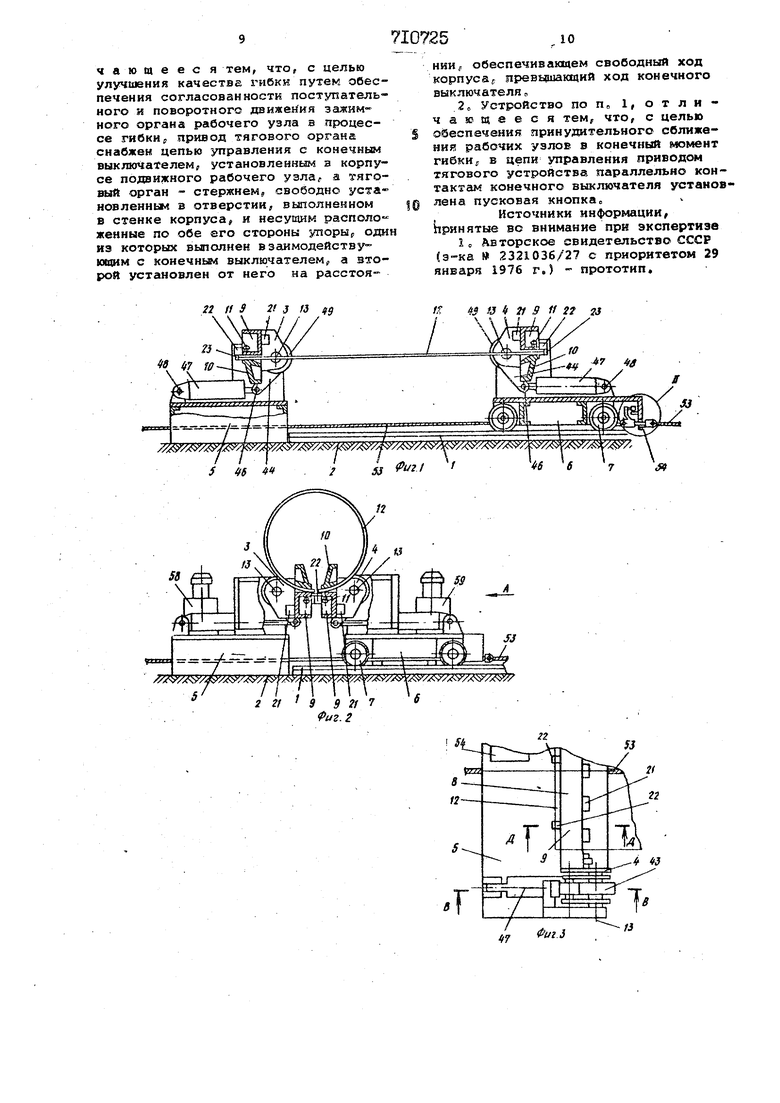
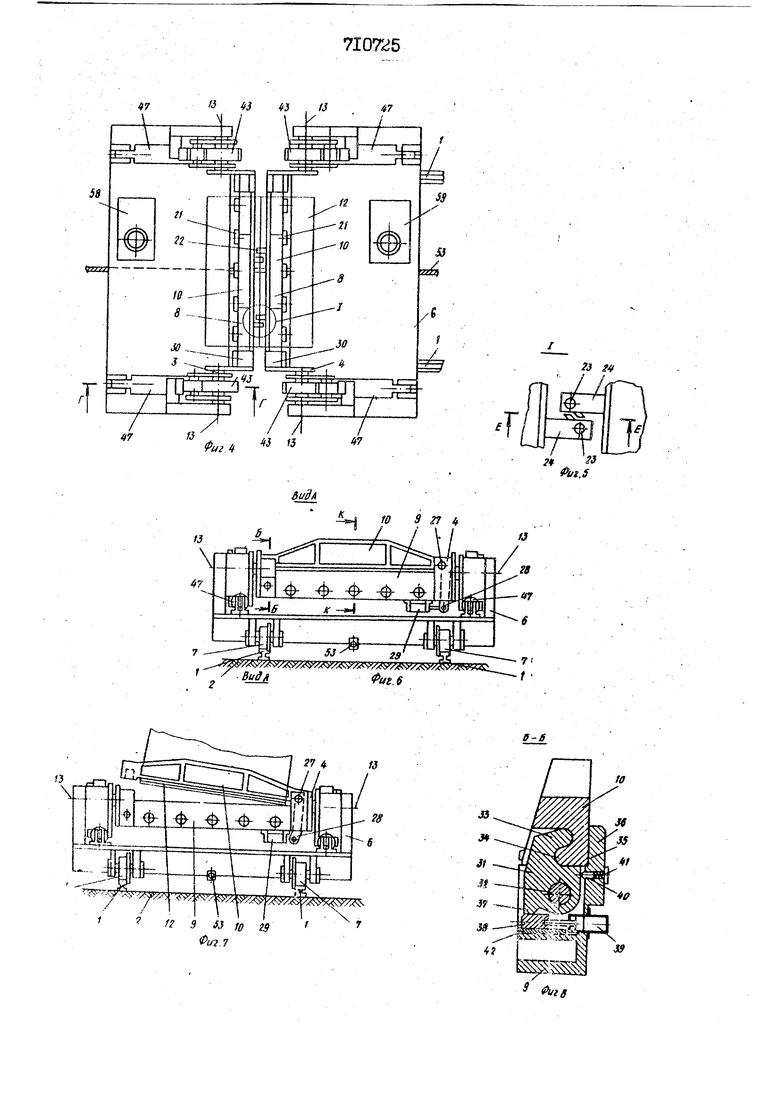
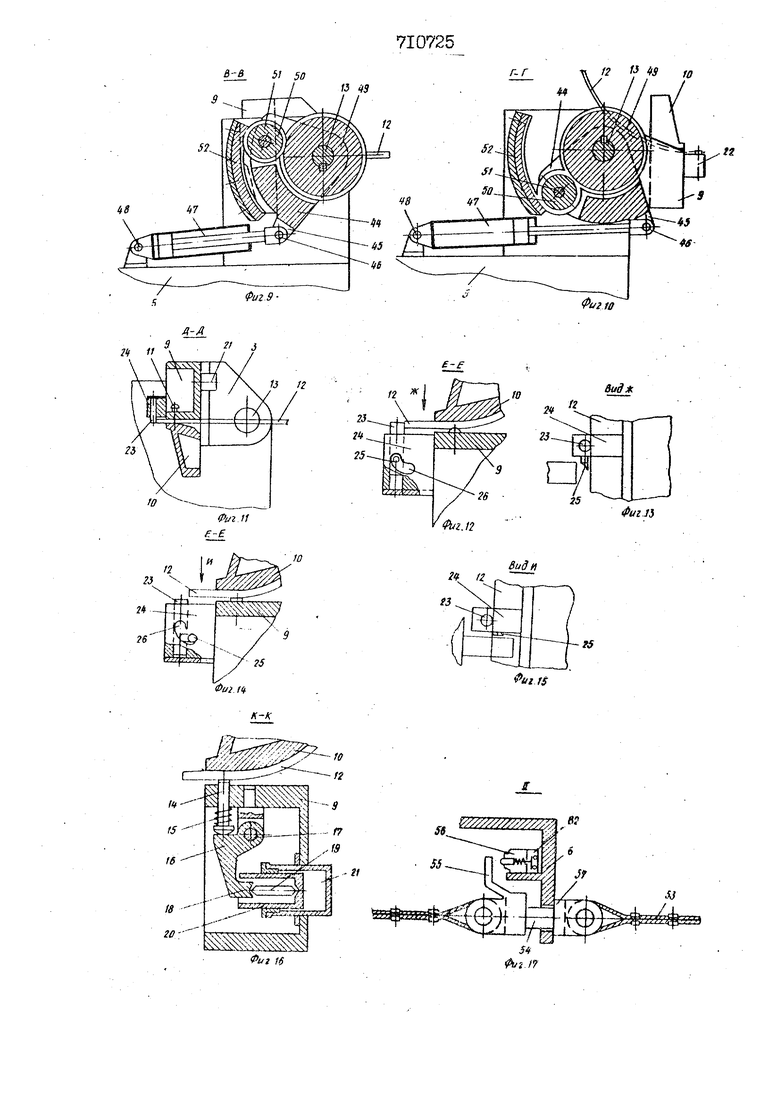
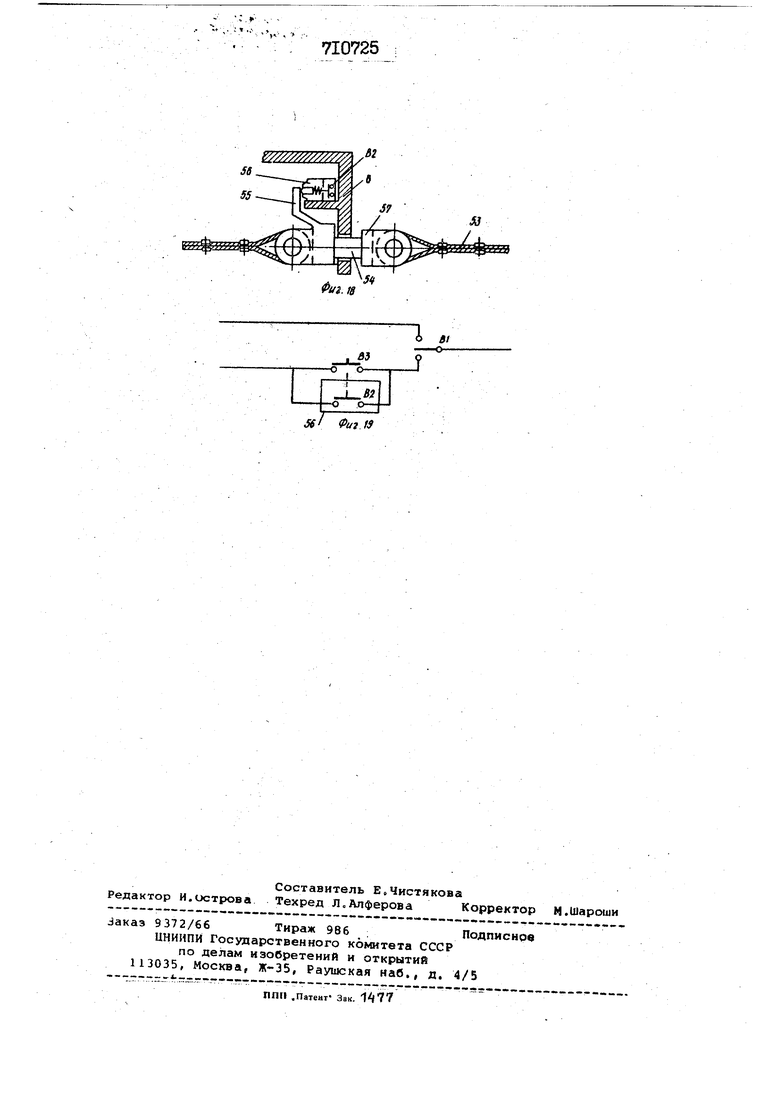
а фиг. 1 показано предлагаемое устройство,(общий вид сбоку в исходном положении перед началом гибки); на фиг. 2 - то же, по окончании гибки; на фиг. 3 - то же, в плане (в исходном положении перед началом гибки, фрагмент); на фиг. 4 - то же, в плане по окончании гибки; на фиг. 5 узел 1 на фиг. 4; на фиг. 6 - вид по стрелке А на фиг. 2; на фиг, 7 то же, при съеме готовой обечайки; на фиг. 8 - разрез Б-Б на фиг. 6; на фиг. 9 - разрез В-В на фиг..З; на фиг. 10 - разрез Г-Г на фиг. 4; на фиг. 11 - разрез Д-Д на фцг. 3; на фиг. 12 - разрез Е-Е на фиг. 5 (перед смыканием кромок заготовки); на фиг. 13 - вид по стрелке Ж на фиг. 12; на фиг. 14 - узел 1 на фиг. 4 (в момент смыкания кромок заготовки); на фиг, 15 - вид по стрелке И на фиг. 14; на фиг. 16 - разрез К-К на фиг. б; на фиг. 17 - узел 11 на фиг, 1; на фиг. 18 - узел IT на фиг. 1 (в момент смещения подвижного корпуса влево); на фиг. 19 схема участка цепи управления приводом тягового органа.
Устройство для гибки обечаек из листовых заголовок состоит из двух направляющих 1, жестко закрепленных на основании 2, двух рабочих узлов
3и 4, первый, из которых расположенна корпусе 5,. жестко закрепленном
на основании 2, а второй - на корпусе б, подвижном на роликах 7 по направляющим 1. Каждый из рабочих узлов 3 и 4 представляет собой струбцину 8, состоящую из двухопорной балки 9 и шарнирно соединенной с ней откидной балки 10. Двухопорная балка 9 снабжена элементами зажима 11 заготовки 12. Рабочие узлы 3 и
4выполнены поворотными вместе со струбцинами 8 вокруг осей 13, омещенных относительно зажимных эле-, ментов 11 в сторону центра заготовки 12. Зажимные.элементы 11 выполнены в виде пальцев 14, перпендикулярных плоскости заготовки 12 и подпружиненных с поомгдью пружин сжатия 15 в сторону, противоположную направлению заготовки 12. Пальцы14 расположены у края двухопорной балки 9, в полости которой размещены Г-образные двуплечие рычаги 16,. соединенные с балкой 9 с помощью шарниров 17. Короткие плечи рычагов 16 взаимодействуют с пальцами 14, а лпинные - снабжены призматическими углублениями 18, в которые упираются призмы 19, установленные в полостях стаканов 20 и упирающиеся в данные части этих стаканов. Каждый стакан 20 представ/1яет собой шток сипового цилиндра 21 одностороннего
действия, ось которого параллельна плоскости заготовки 12 и перпендикулярна оси 13 поворота рабочих узлов 3 и 4.
На балках 9, с внешней по отношению к центру заготовки 12 стороны, закреплены упоры 22. Каждый упОр преставляет собой цилиндрическт1й палец 23, размещенный в отверстии корпуса 24 перпенди улярно плоскости заготовки 12. Корпуса 24 жестко соединены с балками 9 Кажцый палец 23 снабжен рлчагом 25, жестко соединеннымс ним и перпендикулярным его оси. Рычаг 25 разманен в зинтовой прорези 26, которая прог езана в стенке корпуса 24, перпендикулярной продольной оси струцины. Угол подъема винтовой линии этой прорези достаточно велик и обеспечивает с одной стороны выведение пальца из соприкосновения с заготовкой 12 вниз, а с другой - исключает самоторможение рычага 25 в прорези 2 и обеспечивает возврат его и пальца 23 в исходное положение под действие собственного веса при повороте рабочих узлов.3 и 4 вокруг осей 13. Упоры на левой и правой балках 9 расположены таким образом, что упоры, закрепленные на левой балке 9, являются зеркальными по отношению к упорам, закрепленным на правой балке 9. Кроме того, упоры, размещенные на левой балке, сдвинуты вдоль этой балки на величину ширины корпусов 24 упоров 22, закрепелняых на правой балке, т.е. при сьеденных струбцинах 8 упоры заходят ДРУГ за друга и их корпуса находятся в непосредствеЕ1ной близости друг от друга.
Откидная балка 10 каждой струбцины 8 с помощью шарнира 27 соединена с двухопорной балкой 9 и снабжена рычагом 28, который шарнирно соединен со штоком силового цилиндра 29, закрепленного на балке 9.
На противоположном шарниру 27 конце балок 9 и 10 снабжены замковым механмзмс 4 30, выполненным в виде ригеля 31, поворотного вокруг оси 32, параллельной оси 13 поворот а струбцины 8 и закрепленной на двухопорной балке 9. Ригель 31 снабжен зубом 33, а откидная балка 10 - зубом 34,взаимодействующим с зубом 33 ригеля 31. Затылочная часть 35 зуба 34 балкон 10 выполнена плоской и взаимодействует с планкой 36, жестко соединенной с балкой 9. Центр тяжести ригеля 31 смещен от оси 32 в сторону его открывания. Ригель на нижне коьце снабжен выступом 37, взаимодействующим с по.)1зуном 38, жестко свзанным со штоком силового цилиндра
. 39, ось которого перпендикулярна оси 32, Планка 36 снабжена упором 40, попружиненным с помощью пргжины сжатия 41 В сторону ригеля 3). Ползун
38 нижней своей частью опирается на планку 42, жестко закрепленную на балке 9,
Для поворота рабочих уэлоэ 3 и 4 со струбцинами 8 вокруг осей 13 пре усмотрены механизмы принудительног поворота 4.3. Каждый из этих механизмов представляет собой планетарный механизм, состоящий из водила 44, поворотного вокруг оси 13 Водило 44 снабжено рычагом 45, который с помощью шарнира 46 соединен со штоком силового цилиндра 47, Последний с помощью шарнира 48 установлен на корпусе 5 или 6. Центральное подвижное зубчатое колесо 49 этого планетарного механизма жестко соединено с осью 13 рабочего узла 3 или 4, а сателлит 50 свободно посажен на оси 51/ жестко соединенной с водилом 44. При этом центральное неподвижное зубчатое колесо выполнено в виде зубчатого сектора 52, жестко соединенного с корпусом 5 или б. Число зубьев подвижного 49 и неподвижного 52 центральных зубчатых колес и сателлита 50 выполнены такими, чтобы при повороте рабочего узла 3 или 4 вместе с балками 9 и- 10 на 180 угол поворота водила 44 не превышал 60«.
Подвижный корпус б соединен с тяговым органом, например канатом 53, с помощью стержня 54 свободно пропущенного через отверстие в корпусе 6. Реверсивное движение тягового органа 53 передается от тягового привода (на чертежах не показан). Стержень 54 снабжен с одной стороны упором 55, который взаимодействует с конечным выключателем 56, установленным на подвижном корпусе 6, а с другой стороны упором 57, расположенным от упора 55 на расстоянии, обеспечив анвдем свободный ход корпуса 6, превышающий ход конечного выключателя 56.
Силовые цилиндры устройства питаются от насосных агрегатов 58 и 59, (см. рис, 1), первый из которых установлен на корпусе 5, а второй на :.:; корпусе б, псшвижном по направляюпшм 1, На остальных Чертежах для упрощения насосные агрегаты 58 и 59 не показаны.
Реверсирование движения тягового органа 53 производится переключателем В1, В цепи управления движением тяговым органом 53 в направлешси сближения рабочих узлов 3 и 4 установлен конечный выключатель 56, закрепленный на корпусе 6, с контактами В2, Для принудительного сближения рабочих узлов 3 и 4 в цепи управления тягоВым органом 5 паралельно конечному выключателю 56 установлена кнопка пускВ 3.
Устройство работает следукадим образом. Рабочие узлы устройства устанавливают в исходное положение, прикотором балки 10 находятся снизу, а балки 9 - сверху, над балками 10, При зтом зуб 33 ригеля находится в зацеплении с зубом 34 балки 10, упор 40 сжимает пружину 41, а пальцы 23 под действием собственного iaeca вьетвинуты из корпусов 24 упоров 23, Затем корпус 6 вместе со всеми закрепленнь1ми на нем элементами отводят по направляющим 1 вправо и цховыми транспортными средствами подают заготовку 12, заводя ее левый край между балками 9 и 10 левого рабочего узла 3 до упора в пальцы 23, После этого корпус 6 п дамеадают влеро, заводя правый конец заготоки 1 2 между балками 9 и 10 рабочего узла 4, Перемещение корпуса б продолжают до упора правого конца заготовки 1 2 в пальцы 23. Затем включают насосные агрегаты 58 и 59, от которы жидкость под давлением подают в силовые цилиндры 21 элементов 11 зажима заготовки. При этом стаканы 20, выдвигаясь из цилиндров 21; через призмы 19 передают усилия рычагам 16, которые, поворачиваясь на осях 17, нажимают на пальцы 14, сжимая пружины 15 и прижимая заготовку 12 к балкс1М 10, На этом кончается установка и зажим заготовки.
После зажима заготовки между балками 9 и 10 струбцин 8 жидкость под давлением от насосных агрегатов 58 и 59 подают в поршневые полости силовых цилиндров 47, в результате чего поршень со пггоком, выдвигаясь из цилиндра, потэорачивают водила 44. При этом сателлиты 50, обкатываясь по секторам 52, поворачивают подвижные иентральные зубчатые колеса 49, от которых врамение передается рабочим узлам 3 и 4« При этом рабочий узел 3 вместе с балками 9 и 10 поворачивается против часовой стрелки вокруг оси 13, а рабочий узел 4 вмейте с балками 5 и 10 поворачивается по часовой стре.пке,
В процессе поворота рабочих узлов 3 и 4 края эаготорки опускаются вниз двигаясь по дугам окружностей, т,е. поворачиваются вокруг осей 13, благодаря чему заготовка изгибается, испытывая напряжения чистого изгиба,
напряжения в материале заготовки вызывает усилие, направленное на сближение концов заготовки 12, а вместе с ними рабочих узлов 3 и 4, В результате этого усилия рабочий узел 4, расположенный на корпусе б движется навстречу рабочему узлу 3, расположенному на неподвижном корпусе 5, При этом скорость движения корпуса б всегда согласована со скоростью поворота рабочих узлов 3 и 4, так как сближ зние концов заготовки
в данном случае зависит только от поворота краэв заготовки.
Конечный выключатель 56, двигаясь вместе с корпусом 6 влево (см. фиг, 17), касается упора 55. При этом нормально открытые контакты 82 замыкаются и включают цепь управления движением тягового органа 53 в сторону сближения концов заготовки Движение тягового органа 53 продолжается RQ тех ПОР; пока не разомкну тся контакты В2 конечного выключате ля 56 При дальнейшем лвиженин корпуса ,6 автоматическое включение движения тягового органа 53 повторяет- ся.
, Поворот рабочих уэлоа вокруг осей 13 происходит до тех пор пока бал- ки 10 не окажутся сверху, а балки 9 снизу, Тово пока рабочие узлы не повернутся на 180° по сравнению ее своим исходным положениемf изображенным на фиг, 1, При этом водила 44 повернутся на 60° и кромки за- готовки подойдут вплотную друг к другу и готовы к полному смыканию,
В конце гибки, когда усилие в направлении сближения концов заго товки 12, вызванное в материале за готовки напряжениями чистого , становится столь малыг, что не обеспечивает дальнейшее движение рабочего узла 4 с корпусом 6 по, направлякяцим 1; движение .тягового органа 5 производится принудительновключением кнопки пуск ВЗ.
в процессе дальнейшего сведения кромок и их смыкания рычаги 25 упираются в корпус 24 и,-поворачиваются скользя в винтовых вырезах 25, в результате чего пальцы 23 опускаются, освобождая кромки заготовки 12, последние полностью слыкаются,,после чего производится их соединение с , ПОМО1ДЫО сзаркио После соединения кромок заготовки 12 с помощью еварки жидкость под давлением из цилиндров 21 выпускаютf,сообщая их- полос ти с балками насосных агрегатов 58 и 59. При этом под действием пружин 15 пальцы 14 отойдут от заготовки 12, а рычаги 16повернутся против ча .стрелки, вдвинув штоки 20 в цилиндры 21. В результате этого готовая Обечайка освободится от зажи ма.
После освобождения готовой обечайки жидкость под давлением подают в ытоковые полости силовых цилиндров 39, При этом ползун 38 передви гается вправо, освобождая выступ 37 ригеля 31, Под действием собственно™ го веса и упора 40 ригель 31 поворачивается npoTtfB часовой стрелки и его зуб 34 виходлт из зацепления с зубом 33 балки 10f в результате чего замковые механизмы открываются, освобожцая левые концы балок Ю, Затем жидкость под йс1влением подается
в штоковые полости силовых цилиндров 29f штоки которых,, втягиваясь в цилиндрыf поворачивают рычаги 28, что приводит к раскрыванию струбцин 8 путем поворота балок 10, жестко связанных с рычагами 28, После этого готовую обечайку 12,цехов1 ш транспортными средствами снимают с устройствае На этом оканчивается рабочий цикл устройствао
Для подготовки устройства к следукшему циклу жидкость под давлением подают в поршневые полости силовых цилиндров 29, штокн которых, внлвигаясь; поворачивают рычаги 28 и балки 10 против часовой стрелки В результате этого балки 10 опускаются на валки 9 и затылочные части 35 зубьев 33 балок 10 приходят в соприкосновение с планками 36 в Затем жидкость под давлением подают в поршневые полости силовых цилиндров 39с При этом штоки этих цилиндров и ползуны 38 двигаются влево с Ползун 38, воздейстзуя на зуб 37, поворачивает ригель 31 по часовой стрелке, вводя ,зуб 34 в контакт с зубом 33 балки 10 Нажимая утюр 40 и сжимая пружину 41; Таким образом происходит замыкание зковых механизмов. После этого переключателем В1 реверсируют тяговый орган 53 и с его помощью корпус 6 отодвигают от корпуса 5 на расстояние достаточное для установки на усройство следуквдей заготовки и подачей жидкости под давлением в штоковые полости силовых цилиндров 47, производят поворот рабочих узлов 3 и 4 и входягаих в их состав струбцин Bf состоятих из балок 9 и 10, 6 иркодное положение, при котором- балки 9 находятся сверху, а балки 10 - снизу При этом пальцы 23 с рычагами 25 поя действием собственного веса и винтовых прорезей 26, поворачиваясь переместятся вниз и .концы пальцев 23 выйдут из корпусов 24 упоров 22,
Устройство готового к гибка следунздей заготовки,, после установки и зажима которой цикл повтеряетсяt
Таким образом, предлагаемое устройство позволяет улучшить качество гибки за счет исключения несогласованности сближения рабочих узлов 3 и 4 с их поворотом в процессе гибки
Формула изобретенияя
1, Устройство для гибки обечаек из листового материала, содержаиее Bsa несуишх зажимные поворотные органы рабочих узла, один из которых установлен я корпусе, имеющем возможность перемещения в направлении другого рабочего узла и связанном приводным тяговым органом, о т л и чающееся тем, что, с целью улучшения качестве гибки путем обеспечения согласованности поступательного и поворотного движения зажим ного органа рабочего узла в процессе гибки5 привод тягового органа снабжен цепью управления с конечным выключателем; установленным а корпусе подвижного рабочего узла, а тяговый орган - стержнем, свободно уста новленнь в отверстии, выполненном в стенке корпуса, и несущим располо женные по обе его стороны упорыр оди иэ которых выполнен взёдамодействующим с хонечньок выключателем, а второй установлен от него на расстоя2i 11 S 21 3 13 49 ,i 2 2f 9 9 21 Ч Фиг. 2
НИИ, обеспечивающем свободный ход корпуса превьщикщий ход конечного выключателя„
2 о Устройство поп„ 1, отличающееся тем; что, с целью обеспечения принудительного сближения рабочих узлов в конечный момент гибки; в цепи управления приводом тягового устройства параллельно контактам конечного выключателя установлена пусковая кнопкас
0
Источники информации Ьринятые во внимание при экспертизе
1 с Авторское свидетельство СССР (э-ка 2321036/27 с приоритетом 29 января 1976 г.) прототип. К
1 «S S II 2f УЗ A{feVy
Jt «
Фиг л
Д /«
- W S 21 It
4
-Ф- -Ф- ф -ф -Ф ,-..11 ..Ь-1 -llI 11.11. I ..tn ..I 11
Л--
л;
,fff-р . 7 I
/ .
Т
/ 5 AJ // ts
Фи2.7
У /
9/f S
/Ж
аг.б
га
J
В-в 5 50
Д-А
2, f
ЛуЧЧ
н
Фиг /«
-е
вид
/г
Я
25
Фиги
Вид к
aifS
иг 16
SJ
//////y/////Z y
Фиг. 8
SS Фиг 19
a
