Изобретение относится к иопользованию атомно-ядерных излучений, в частности к использованию их для контроля рельефа поверхности вещества и может быть использовано в черной металлургии.
Из основного авт. св. № 237411 известен способ определения координат рельефа поверхности вещества с иопользованием атомноядерных излучений. Однако при враЩ|ении подвижного элемента одного из блоков, например блока источника, с целью принудительного перемещения облученной зоны по заданной программе, скорость перемещения облученной зоны по рельефу произвольной пространственной формы оказывается неконтролируемой и может принимать на некоторых участках рельефа недопустимо высокие значения, что приводит к появлению переменной и неограниченной по величине динамической погрешности измерения.
Кроме того, вследствие .арительного выбора пропраммы вращения подвижного элемента блока .источника, время измерения конкретного рельефа неоптимально и существенно выше необходимого.
Предлагаемое изобретение, усовершенствуя и дополняя способ по авт. св. № 2374М, позволяет повысить точность измерения и уменьшить время измерения до минимальной величины. Это обеспечивается тем, что сигнал разбаланса используют для совместного управления ПОДВИЖНЫМИ элементами блока источника и блока приемника излучения.
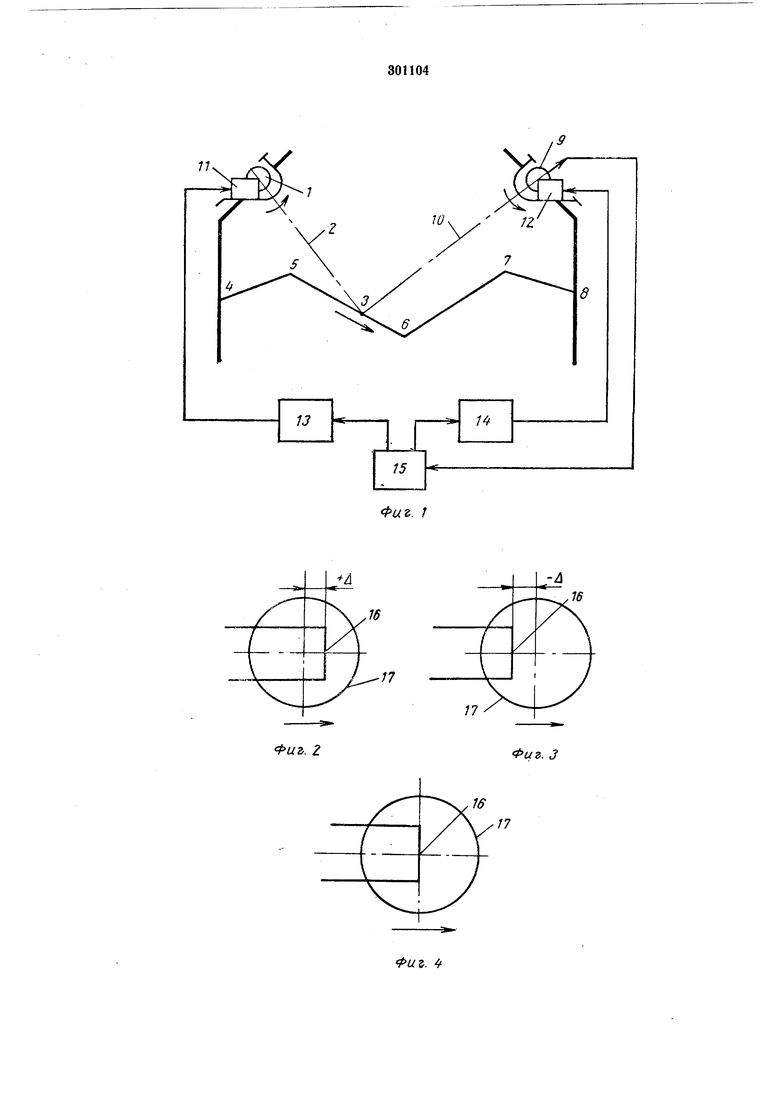
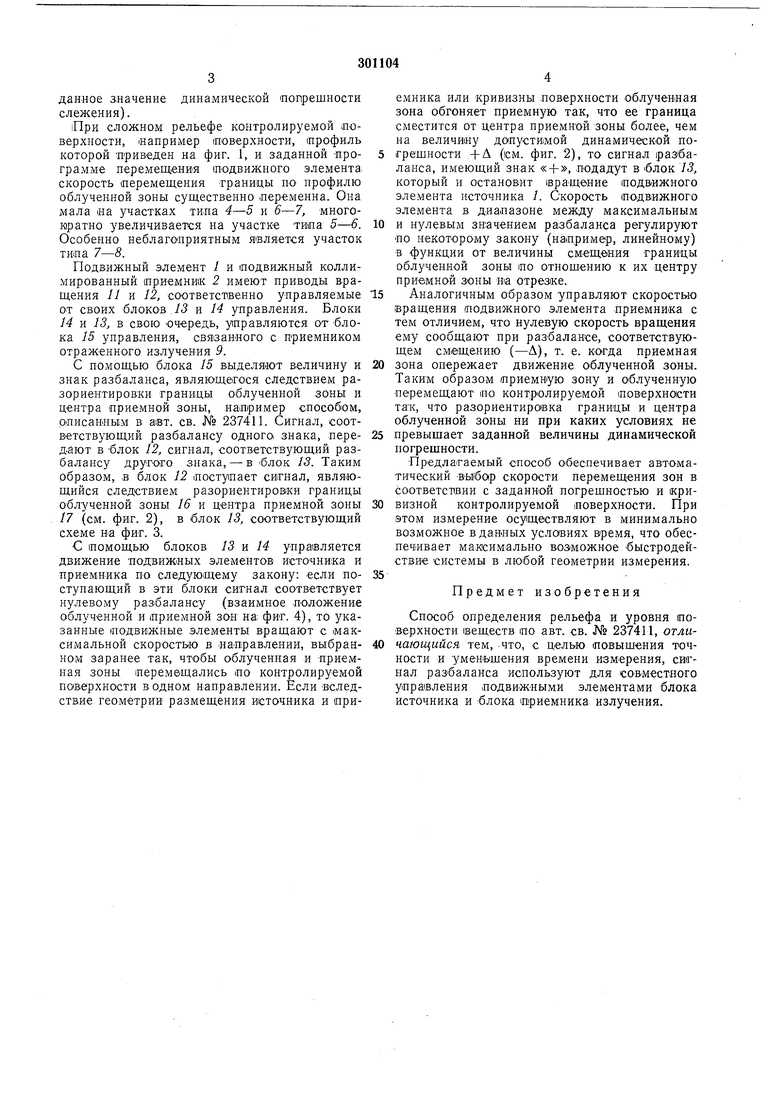
Сущность изобретения поясняется на чертежах, где на фиг. 1 схема реализации способа; на фиг. 2 - схема взаимного располол елия приемной и облученной зон при наличии динамической положительной погрешности; на фиг. 3 - то же, но при наличии отрицательной динамической погрешности; на фиг. 4 - то же, но при отсутствии динамической погрешности.
/-подвижный элемент блока источника излучения. Ориентацию его оси 2 меняют поворотом подвижного элемента. При этом граница облученной зоны 3 будет перемещаться по контролируемой поверхности, профиль которой показан в виде ломаной линии 4-,5- 6-7-8. За перемещающейся границей облученной зоны следят с помощью подвижного коллимированного приемника отраженного излучения 9, ось ориентации которого обозначена цифрой 10. Ось показана ориентированной в точку 3, что условно означает идеальный случай - отсутствие погрешности слежения. При перемещении точки 3 (границы облученной зоны) по контролируемой поверхности ось 10 должна быть постоянно ориентирована на границу (или в точку, отстоящую от нее на величину меньшую, чем заранее задаННое значение динамической оолрешности слежения).
Ори сложном рельефе контролируемой поверхности, гнапример (поверхности, профиль которой приведен на фиг. 1, и заданной программе неремещениЯ подвижного элемента скорость перемещения границы но профилю облученной зоны существенно .переменна. Она мала «а участках тила 4-5 и 6-7, многоKipaTHo увеличивается на участке типа 5-6. Особенно неблагоприятным является участок типа 7-8.
Подвижный элемент / и подвижный коллимированный приемник 2 имеют приводы вращения 11 и 12, соответственно управляемые от своих блоков./5 н 14 управления. Блоки 14 и 13, в свою Очередь, управляются от блока 15 управления, свя1занного с приемником отраженного излучения 9.
С помощью блока /5 ВЫделяют Величину и знак разбаланса, являющегося следствием разориентировки границы облученной зоны и центра приемной зоны, нап)ример способом, описанным в aiBT. св. № 237411. Сигнал, соответствующий разбалансу одного знака, передают в блок 12, сигнал, соответствующий разбалансу другого знака, - в -блок 13. Таким образом, .в блок 12 поступает сигнал, являющийся следствием разориентировжи границы облученной зоны 16 и центра приемной зоны /7 (см. фиг. 2), в блок 13, соответствующий схеме н-а фиг. 3.
С помощью блоков 13 и 14 управляется движение подвижных элементов источника и приемника по следующему закону: если поступающий в эти блоки сигнал соответствует нулевому раз балансу (взаимное положение облученной и приемной зон на фиг. 4), то указанные подвижные элементы вращают с максимальной скоростью в направлении, выбранном заранее так, чтобы облученная и приемная зоны перемещались по контролируемой поверхности водном направлении. Если ВСледствие геометрии размещения источника и приемника или кривизны .поверхности Облученная зона обгоняет приемную так, что ее граница сместится от центра приемной зоны более, чем на величину допустимой динамической погрешности ,+ А (1см. фиг. 2), то сигнал разбаланса, имеющий знак « + , подадут в блок 13, который и Остановит вращение подвижного элемента источника I. Скорость подвижного элемента в диапазоне между максимальным и нулевым значением разбаланса регулируют по некоторому закону (например, линейному) В функции от величины сМещения границы облученной зоны по отношению к их центру прибмной зоны на отрезке.
Аналогичным образом управляют скоростью вращения подвижного элемента приемника с тем отличием, что нулевую скорость вращения ему сообщают при разбалансе, соответствующем смещению (-А), т. е. когда приемная зона опережает движение о-блученной зоны. Таким образом приемную зону и облученную Перемещают по контролируемой поверхности так, что разориентировка границы и центра облученной зоны ни при каких условиях не превышает заданной величины динамической погрешности.
Прбдлагаемый способ обеспечивает автоматический В-ыбор скорости перемещения зон в соответст1вии с заданной погрешностью и кривизной контролируемой поверхности. При этом измерение осуществляют в минимально возможное в данных условиях время, что обеспечивает максимально воэможНОе быстродействие системы в любой геометрии измерения.
Предмет изобретения
Способ определения рельефа и уровня поВерхности веществ по авт. св. № 237411, отличающийся тем, что, с целью повышения точности и умен1ьщения времени измерения, сигнал разбаланса используют для совместного управления подвИЖНЫми элементами блока источника и блока тариемника излучения.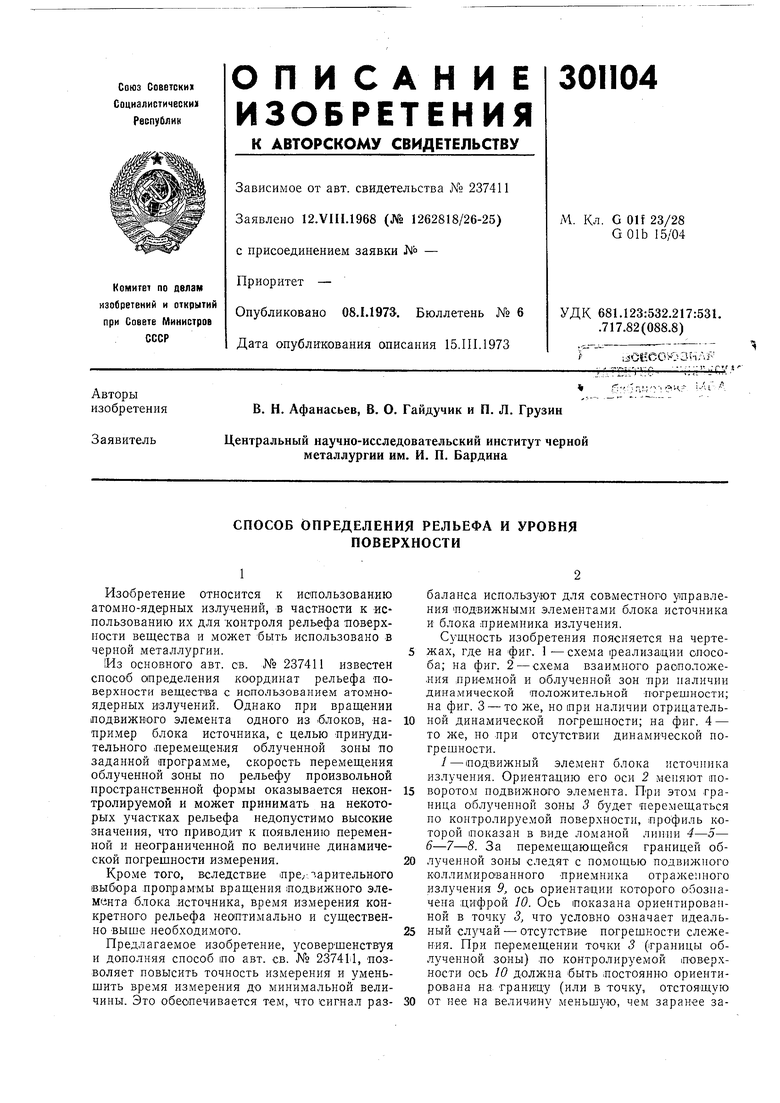
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения рельефа и уровня поверхности материалов | 1990 |
|
SU1807309A1 |
| Способ определения рельефа и уровня поверхности | 1982 |
|
SU1065686A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И УРОВНЯ ПОВЕРХНОСТИ | 1969 |
|
SU237411A1 |
| Способ определения рельефа и уровня поверхности | 1974 |
|
SU515029A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАДАННОГО КЛАССА ПО КРУПНОСТИ В КУСКОВОМ МАТЕРИАЛЕ, ПЕРЕМЕЩАЕМОМ В ТЕХНОЛОГИЧЕСКОМ ПОТОКЕ | 1996 |
|
RU2125257C1 |
| СПОСОБ БЕСКОНТАКТНОГО ДИНАМИЧЕСКОГО КОНТРОЛЯ ИЗНОСА КОЛЕС ПОДВИЖНОГО СОСТАВА | 1998 |
|
RU2147729C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И УРОВНЯ ПОВЕРХНОСТИ МАТЕРИАЛОВ | 1999 |
|
RU2172931C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И УРОВНЯ ПОВЕРХНОСТИ МАТЕРИАЛОВ | 1980 |
|
SU978672A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2252395C1 |