Изобретение относится к контрольно- измерительной технике, в частности, к способам измерения рельефа и уровня поверхности материалов с помощью ионизирующих излучения и может быть использовано для определения рельефа и уровня поверхности шихтовых материалов на колошнике доменной печи, Цель изобретения - повышение точности измерения.
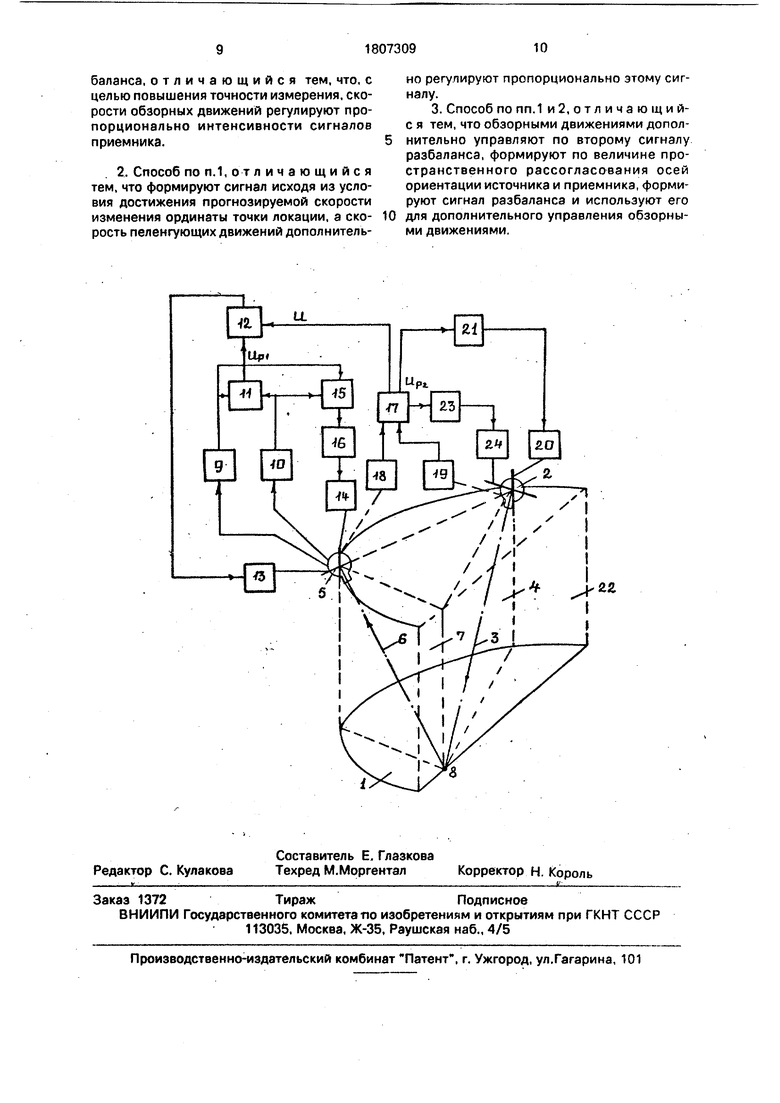
На чертеже изображена схема осуществления способа.
Контролируемую поверхность 1 облучают выходящим из блока 2 источника кол- лимированным пучком ионизирующего
излучения, ось 3 которого является осью ориентации блока 2 источника, причем указанный пучок излучения формируют вытянутым в вертикальной плоскости 4. проходящей через центр блока 2 источника и ось 3 ориентации блока 2 источника (на чертеже контролируемая поверхность 1 для простоты изображена в виде горизонтальной плоскости). При этом на контролируемой поверхности образуется облученная зона, вытянутая в направлении блока 2 источника.
Рассеянное излучение регистрируют двумя детекторами коллимированного блока приемника 5, в который попадает излучение с двух ограниченных приемных полузон, имеющих общую границу, через центр которой (центр приемной зоны) проходит ось 6 ориентации блока 5 приемника, причем оси ориентации каждого детектора блока 5 приемника располагают в вертикальной плоскости 7. проходящей через центр блока 5 приемника и ось 6 ориентации блока 5 приемника, примерно симметрично относительно оси 6 (на чертеже оси ориентации детекторов не показаны). При этом ось 6 ориентации блока 5 приемника пересекается с плоскостью 4 первичного излучения блока 2 источника в точке 8 локации. Сигналы блока 5 приемника накапливают в накопителях 9 и 10, после накопления сравнивают их в блоке 11 сравнения, в результате чего на выходе блока 11 сравнения получают основной сигнал разбаланса Up , характеризующий взаимнс расположение центров облученной и приемной зон в плоскости 7, т.е. погрешность измерения. В соответст- Е чи с величиной и полярностью сигнала раз- баланса Up управляют пеленгующими движениями блока 5 приемника с помощью блока управления 12 и сервопривода 13, обеспечивающего соответствующий поворот блока 5 приемника в плоскости 7 относительно горизонтальной оси вращения блока 5, перпендикулярной плоскости 7, до исчезновения (до нулевого значения) сигнала разбаланса, т.е. до совмещения центров облученной и приемной зон в плоскости 7, когда точка 8 локации практически совмещена с контролируемой поверхностью 1. При этом угловая скорость указанных пеленгующих движений определяется сигналом разбаланса Up , коэффициентом передачи (усиления) блока 12 управления Ki2 и коэффициентом передачи Ктзсервопривода 13 в соответствии с формулой
К12 К13
Одновременно с пеленгующими движениями осуществляют обзорные движения блока 5 приемника относительно его вертикальной оси вращения с помощью сервопривода 14 для обеспечения перемещения точки 8 локации вблизи контролируемой поверхности в заранее выбранном направлении, например, в направлении удлинения облученной зоны (в направлении облученной полосы), причем скорость этих движений регулируют пропорционально интенсивности сигналов блока 5 приемника с помощью суммирующего блока 15, в котором суммируют накопленные в накопителях 9 и 10 сигналы приемника с получением сигнала на выходе, пропорционального интенсивности сигналов блока 5 приемника, и
блока 16 управления. При таком регулировании скорости обзорных движений блока 5 приемника происходит автоматическое ограничение возможного роста динамической
5 погрешности, обусловленного уменьшением интенсивности отраженного полезного сигнала по разным причинам, например, при удалении контролируемого участка поверхности от блоков источника и приемника
Ю или естественного снижения активности излучателя блока 2 источника с течением времени, а также реализуется возможность автоматического снижения времени измерения без снижения точности измерения
15 при увеличении интенсивности отраженного сигнала.
Координаты точки 8 локации определяют с помощью вычислительного устройства 17, связанного с датчиками 18 и 19 ориента20 ции источника и приемника.
С целью дальнейшего повышения точности измерения, а также снижения времени измерения и активности излучателя блока 2 источника скорость пеленгующих
25 движений блока 5 приемника дополнительно регулируют с помощью блока 12 управления пропорционально сигналу U формируемому вычислительным устройством 17, исходя из условия достижения ско30 рости изменения во времени ординаты у точки 8 локации прогнозируемой скорости изменения этой ординаты, т.е. исходя из условия:
y «Vy,(2)
35 где у - скорость изменения ординаты точки 8 локации (производная), обеспечиваемая с помощью вычислительного устройства 17, блока 12 управления и сервопривода 13 с учетом положения осей ориентации блоков
40 источника и приемника и динамики изменения этого положения;
Vy Ay/At - прогнозируемая скорость изменения ординаты точки 8 локации; - изменение ординаты точки 8
45 локации за промежуток времени At;
у - ординаты точки локации в момент формирования сигнала на выходе вычислительного устройства 17, соединенного со входом блока 12 управления, представляло ющая собой, расстояние между точкой 8 локации и горизонтальной плоскостью, проходящей через центры блоков источника и приемника;
Уо - предыдущее значение ординаты
55 точки локации, вычисленное устройством 17 за промежуток времени At до момента вычисления величины у.
Прогнозируемую величину Vy могут определять и другим способом, например,
принимать как наиболее вероятную или постоянную величину.
Ординату у вычисляют устройством 17 в общем случае по формуле:
BtgpVtgctn cos#,(tg#,+tg#i)
(3)
где В - расстояние между центрами блоков источника и приемника/расположенными в одной горизонтальной плоскости;
он - угол между осью б ориентации блока 5 приемника и горизонтальной плоскостью;
fin - угол между осью б ориентации бло- ка 5 приемника и вертикальной плоскостью, проходящей через центры блоков источника и приемника, т.е. угол между указанной вертикальной плоскостью плоскостью 7;
/Зи - угол между вертикальной плоско- стью 4, в которой ориентируют плоский по форме пучок излучения блока 2 источника, и вертикальной плоскостью, проходящей через центры блоков источника и приемника.
С учетом (3) условие (2) принимают вид:
-гЈ3&+ 1
xCtg/Vtgfr-lHon t
Uy
COS2 Oh
BcospVtgpV
(4)
где уЗ и - скорость изменения во времени угла /8и, т.е. угловая скорость обзорных движений блока 2 источника относительно его вертикальной оси, осуществляемого с помощью сервопривода 20 блока 21 управле- ния и вычислительного устройства 17 по заранее выбранной программе;
РП - скорость изменения во времени угла fa, т.е. угловая скорость пеленгующих движений блока 5 приемника относительно его горизонтальной оси, необходимая для совмещения точки 8 локации с контролируемой поверхностью в процессе обзорных движений и задаваемая выходным сигналом блока 12 управления.
Для достижения поставленной цели сигналы U на выходе вычислительного устройства 17 формируют на основе условия (4) с учетом коэффициентов передачи блока 12 управления и сервопривода 13 по следую- щему закону:
COS2Oh
Ki2-Ki3(tgA,+tg&)
10
15
0 5
0
5
0
5 0
UL
д/ tgan-tgffn Bcos/ n-tgAi slnpVcospV
-pV-tgOn(tg/Vtg/ n - 1)1 .(5)
Учитывая, что по своему физическому смыслу величина On близка к величине угловой скорости (On, определяемой формулой (1), можно сделать вывод о том, что величина сигнала U формируемого с целью дальнейшего повышения точности, близка к величине основного сигнала разбаланса Up , возникающего на входе блока 12 управления в случае отсутствия дополнительного сигнала U на другом входе блока 12 управления. Следовательно, сигнал U в значительной мере берет на себя роль основного сигнала разбаланса и поэтому дополнительное регулирование скорости пеленгующих движений блоха 5 приемника пропорционально сигналу U приводит к значительному уменьшению сигнала разбаланса Up и динамической погрешности измерения. Погрешность измерения в этом случае определяется практически лишь точностью прогнозирования величины Uy и флуктуацией сигнала разбаланса на выходе блока 11 сравнения, обусловленной случайным характером отраженного излучения.
При контроле профиля поверхности, образованного сечением поверхности вертикальной плоскостью 22, расположенной под углом к вертикальной плоскости, проходящей через центры блоков источника и приемника, на расстоянии d от центра блока 2 источника, регулирование скорости обзорных движений блока источника относитель-. но его вертикальной оси осуществляют с помощью вычислительного устройства 17 блока 21 управления и сервопривода 20 в соответствии с выражением:
slnpVcosfli
в:
sln#,cos#,(1 +fcosp-tg#0
(6)
Ниже рассмотрены возможные частные случаи применения предлагаемого способа.
Пример 1. Плоскость 22 проходит через центр блока 2 источника (pV 0). В этом случае закон формирования сигнала U принимает вид:
COS2Gn
UL
Ki2-Ki3(tg#,+tg/Sn) В cospVtgft -pVtgan(tgpVtg#,-1)(7)
Пример 2. Плоскость 22 проходит через центр блока 2 источника ( 0) и диаметр колошника, а блок 5 приемника расположен на конце другого диаметра колошника, перпендикулярного первому диаметру ({$ 45°). В этом случае закон регулирования U принимает вид:
1
COS2On
, и
Ki2 Ki3(1 +tgЈn) ВсозД, -/Vtgan(tg#i- 1 )J
kHE
Пример З. Плоскость 22 проходит через центры блоков источника и приемника {/У 0, fin - AI 0). расположенных диаметрально противоположно. .В этом случае выражение (3) преобразуется к виду
tg Ой tg On .
(9)
tg C4i + tg он а закон регулирования U принимает вид
Uy-sin2(cfr, +an)-an -B-sih2ah
U
. Ki2-Ki3-B-sin2a i
(10
где Oi, - угол между осью 3 ориентации блока 2 источника и горизонтальной плоскостью;
Оп - скорость изменения во времени угла.
Пример 4. Плоскость 22 проходит через центр блока 5 приемника ( 0), а обзорные движения блока 2 источника осуществляют по произвольной программе. В этом случае закон регулирования сигнала принимает вид:
U
COS2On
ЛХ
K -KisCtg +tgA,) BcosArtgA,
-/V
tgan-tgffn -
Sin/3n COS#, J
С целью дальнейшего повышения точности измерения путем уменьшения радиа- ционного фона за счет уменьшения размеров облученной зоны в плоскости 4 обзорными движениями дополнительно управляют с помощью блока 23 управления и сервопривода 24 по второму сигналу разбаланса Up2, формируемому с помощью вычислительного устройства 17 по величине пространственного рассогласования осей ориентации 3 и 6 блоков источника и приемника. В общем случае условие отсутствия пространственного рассогласования осей
ориентации 3 и 6, т.е. условие нахождения указанных осей в одной плоскости имеет вид:
sln/Vtgan )
Поэтому для непрерывного совмещения оси 3 ориентации блока 2 источника с осью 6 ориентации блока 5 приемника, позволя- 10 ющего уменьшить размеры облученной зоны без риска срыва слежения, упомянутый сигнал разбаланса формируют с помощью вычислительного устройства 17 по следующему закону: 15
slnflrtgah
(an -arctg
(13)
30
35
где К - коэффициент пропорциональности, 20 выбираемый в зависимости от коэффициентов передачи блока 23 управления и сервопривода 24 исходя из необходимости создания условий устойчивого регулирования;
25 Ой-угол между осью 3 ориентации блока 2 источника и горизонтальной плоскостью.
Положительный эффект описанного способа состоит в том, что существенно снижается динамическая погрешность измерения, обусловленная снижением интенсивности отраженных сигналов при изменении отдельных участков поверхности и при уменьшении активности излучателя блока источника, динамическая погрешность,
обусловленная особенностями изменения контролируемого рельефа, поверхности, и случайная составляющая погрешности, обусловленная радиационным фоном.
40 Кроме этого, описанный способ позволяет снизить время измерения и активность излучателя блока источника, что упрощает обеспечение мер радиационной безопасности.
45
Формул а изо бретени я 1. Способ определения рельефа и уровня поверхности материалов, заключающийся в том, что контролируемую поверхность
50 облучают коллимированными пучками ионизирующего излучения, регистрируют отраженное излучение при помощи колли- мированного приемника, осуществляют обзорные и пеленгующие движения источника
55 и приемника и определяют координаты точки локации по ориентации источника и при-- емника, при анализе сигналов приемника формируют сигнал разбаланса и управляют пеленгующими движениями по сигналу разбаланса, отличающийся тем, что, с целью повышения точности измерения, скорости обзорных движений регулируют пропорционально интенсивности сигналов приемника.
2, Способ по п.1, от личающийся тем, что формируют сигнал исходя из условия достижения прогнозируемой скорости изменения ординаты точки локации, а скорость пеленгующих движений дополнитель
но регулируют пропорционально этому сигналу.
3. Способ по пп. 1 и 2, отличаю щи й- с я тем, что обзорными движениями дополнительно управляют по второму сигналу разбаланса, формируют по величине пространственного рассогласования осей ориентации источника и приемника, формируют сигнал разбаланса и используют его для дополнительного управления обзорными движениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения рельефа и уровня поверхности | 1982 |
|
SU1065686A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И УРОВНЯ ПОВЕРХНОСТИ МАТЕРИАЛОВ | 1999 |
|
RU2172931C2 |
| Способ автоматического контроля дефектов поверхности деталей и изделий | 1990 |
|
SU1782314A3 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И УРОВНЯ ПОВЕРХНОСТИ МАТЕРИАЛОВ | 1980 |
|
SU978672A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И УРОВНЯ ПОВЕРХНОСТИ | 1971 |
|
SU301104A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ КОРОТКОВОЛНОВОГО ДИАПАЗОНА | 2012 |
|
RU2490661C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ | 1996 |
|
RU2131132C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ПОДВИЖНОГО ОБЪЕКТА | 1994 |
|
RU2082096C1 |
Изобретение относится к контрольно- измерительной технике, в частности к способам измерения рельефа и уровня поверхности материалов с помощью ионизирующих излучений и может быть использовано для определения рельефа и уровня поверхности шихтовых материалов на колошнике доменной печи. Целью изобретения является повышение точности измерения. Эта цель достигается тем, что в известном способе определения рельефа и уровня материалов, заключающемся в том, что контролируемую поверхность облучают колли- мйрованными пучками ионизирующего излучения, регистрируют отраженное излучение при помощи коллимированного приемника, осуществляют обзорные и пеленгующие движения источника и приемника и определяют координаты точки локации по ориентации источника и приемника, причем пеленгирующими движениями управляют по сигналу разбаланса, формируемому путем распознавания сигналов приемника, скорость обзорных движений регулируют пропорционально интенсивности сигналов приемника, обзорными движе- ниями дополнительно управляют по второму сигналу разбаланса, формируемому по величине пространственного рассогласования осей ориентации источника и приемника, 1 ил.
| Патент США № 3792252, кл.250-435, 1974 | |||
| Авторское свидетельство СССР Мг1240166 | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
