Изобретение относится к измерительной технике, в частности, к измерению контуров поверхности с помощью ионизирующего излучения, и может быть использовано для определения рельефа и уровня поверхности шихтовых материалов на колошнике доменной печи.
Известны устройства для определения рельефа и уровня поверхности материалов, которые содержат блоки источника и приемника ионизирующего излучения с коллиматорами, механизмами поворотов и датчиками положения, вычислительный блок, который подключен своими входами к выходам датчиков положения [патент 3792252 США, кл. 250435, опубл. в 1974 г.].
Недостаток этих устройств состоит в низкой надежности при высоком уровне засыпи материалов и больших размерах контролируемой поверхности.
Наиболее близким по технической сущности является устройство для определения рельефа и уровня поверхности материалов, которое содержит блоки источника и приемника ионизирующего излучения с коллиматорами, механизмами поворотов и датчиками положения, вычислительный блок, который подключен своими входами и выходами соответственно к выходам датчиков положения и входам механизмов поворотов [патент России 978672, кл. G 01 В 15/04, опубл. 27.09.98] .
Недостаток этого устройства заключается в необходимости использования источников ионизирующего излучения с высокой общей активностью, что обуславливает недостаточный уровень радиационной безопасности эксплуатации устройства.
В основу изобретения поставлена задача усовершенствования устройства для определения рельефа и уровня поверхности материалов, в котором благодаря выполнению коллиматоров блоков источника подвижными с механизмами поворотов относительно осей коллимации обеспечивается снижение необходимой активности источников ионизирующего излучения в несколько раз при сохранении высокой надежности контроля поверхности и за счет этого значительно повышается радиационная безопасность условий эксплуатации устройства.
Поставленная задача решается тем, что в устройстве для определения рельефа и уровня поверхности материалов, содержащем блоки источника и приемника ионизирующего излучения с коллиматорами, механизмами поворотов и датчиками положения, вычислительный блок, который подключен своими входами и выходами соответственно к выходам датчиков положения и входам механизмов поворотов, согласно изобретению, коллиматор блока источника выполнен подвижным относительно оси коллимации с механизмом поворота, подключенным своим входом к соответствующему выходу вычислительного блока.
На чертеже приведена структурная схема предложенного устройства.
Устройство для определения рельефа и уровня поверхности материалов содержит блоки 1, 2 источника ионизирующего излучения с коллиматорами, механизмами поворотов 3...8 и датчиками положения 9, 10 их осей коллимации, блоки 11, 12 приемника ионизирующего излучения с коллиматорами, механизмами поворотов 13. . .16 и датчиками положения 17, 18 их осей коллимации, вычислительный блок 19, который своими входами подключен к выходам датчиков положения 9, 10, 17, 18, а выходами - ко входам механизмов поворотов 3...8 и 13...16. Механизмы поворотов 15, 16 выполнены с блоками 20, 21 распознавания сигналов, подключенными своими входами к выходам вычислительного блока 19 и к соответствующим выходам блоков приемника. Первые выходы блоков 20 и 21 подключены к другим входам механизмов поворотов соответственно 15 и 16, а вторые выходы - ко входам механизмов поворотов соответственно 3, 13 и 4, 14.
Механизмы поворотов 3, 4, 13, 14 выполнены с возможностью осуществлять обзорные повороты блоков соответственно 1, 2,11, 12 относительно их первых (неподвижных) осей. Первые оси блоков источника и приемника могут располагаться вертикально, как это изображено на чертеже, или иным образом в зависимости от условий использования устройства. Механизмы поворотов 5,6, 15, 16 выполнены с возможностью осуществления пеленгующих поворотов блоков соответственно 1,2, 11, 12 относительно их вторых осей. Механизмы поворотов 7 и 8 выполнены с возможностью осуществлять повороты коллиматоров блоков 1 и 2 относительно их третьих осей, совмещенных с осями коллимации этих блоков.
Блоки источника и приемника размещены над контролируемой поверхностью на одном уровне симметрично, как это показано на чертеже, или на различных уровнях в зависимости от условий использования устройства. Коллиматор каждого блока источника выполнен в виде щели, форма которой обеспечивает (формирование в плоскости коллимации плоского пучка ионизирующего излучения и соответствующей облученной зоны вытянутой формы ограниченных размеров на контролируемой поверхности (коллиматор на чертеже не показан). Ось коллимации каждого блока источника проходит в плоскости коллимации посередине пучка ионизирующего излучения через центр облученной зоны. Каждый из блоков приемника имеет два детектора отраженного от контролируемой поверхности ионизирующего излучения, выходы которых подключены ко входам соответствующих блоков распознавания сигналов приемника (детекторы на чертеже не показаны). Коллиматор каждого блока приемника создает направленность детекторов таким образом, что выделяются два пучка ионизирующего излучения, которое отражается от ограниченных за размером приемных зон на контролируемой поверхности в направлении соответствующего блока приемника (коллиматор на чертеже не показан). Детекторы размещены и ориентированы симметрично относительно плоскости коллимации соответствующего блока приемника, совмещенной со второй осью его поворота и пересекается с контролируемой поверхностью по линии разграничения двух приемных зон. Ось коллимации блока приемника проходит в плоскости его коллимации через середину общей границы двух приемных зон и центр соответствующего блока приемника.
Устройство работает следующим образом.
В начальном состоянии один из блоков источника, например блок 1, своей осью коллимации ориентирован в вертикальной плоскости, которая проходит через центр первого начального участка поверхности, с которого планируется начать контроль поверхности. Этот начальный участок поверхности выбирается, например, на периферии контролируемой поверхности вблизи блоков 1 и 11 на равных расстояниях от блоков 1 и 11. Блок 11 своей осью коллимации ориентирован в вертикальной плоскости, которая проходит через центр первого начального участка контролируемой поверхности. При этом оси коллимации блоков 1 и 11 пересекаются над контролируемой поверхностью. Блок источника 2 в начальном состоянии ориентирован своей осью коллимации в вертикальной плоскости, которая проходит через центр второго начального участка поверхности, который выбран, например, в центре контролируемой поверхности. Блок 12 приемника своей осью коллимации ориентирован в вертикальной плоскости, которая проходит через центр второго начального участка контролируемой поверхности. При этом оси коллимации блоков 2 и 12 пересекаются над контролируемой поверхностью. Плоскости коллимации блоков 1 и 2 источника в начальном состоянии повернуты с помощью механизмов 7 и 8 поворотов коллиматоров так, что линии их пересечения с плоскостями коллимации соответствующих блоков приемника расположены горизонтально.
Далее, при необходимости контроля поверхности материалов, блоки источника и приемника вместе с соответствующими механизмами поворотов выводятся по сигналам блока 19 в режим пеленгующих поворотов относительно их вторых осей. Пеленгующие повороты осуществляются так, что точки пересечения осей коллимации соответствующих блоков источника и приемника (точки локации) приближаются к контролируемой поверхности. При этом, блоки приемника 11 и 12 вместе с механизмами поворотов 15 и 16 выполняют роль ведущих блоков, которые задают повороты их осей коллимации в соответствии с первыми сигналами розбаланса на первых выходах блоков 20 и 21 распознавания, а блоки источников 1 и 2 вместе с механизмами поворотов 5 и 6 выполняют роль ведомых блоков, которые пропорционально (синхронно) повторяют соответствующие повороты блоков 11 и 12 по сигналам блока 19 так, что точки локации перемещаются в первой контролированной вертикальной плоскости. Относительно этой плоскости блок 1 расположен симметрично блоку 11, а блок 2 - симметрично блоку 12. При этом, в случае вертикального размещения первых (неподвижных) осей поворотов, блоки источника и приемника остаются неподвижными относительно их первых осей и поэтому точки локации приближаются к центрам соответствующих начальных участков контролируемой поверхности по вертикали. В случае других схем размещения первых осей блоков источника и приемника одновременно с пеленгующими поворотами осуществляются синхронные обзорные повороты соответствующих блоков источника и приемника относительно их первых осей с помощью механизмов поворотов 3, 4, 13, 14 по сигналам блока 19 так, что точки локации приближаются к центрам соответствующих начальных участков контролируемой поверхности по вертикали. В процессе этих обзорных поворотов блоки 11 и 12 выполняют роль ведущих блоков, а блоки 1 и 2 - роль ведомых блоков. Синхронизация обзорных поворотов осуществляется по вторым сигналам розбаланса, которые формируются вычислительным блоком 19 пропорционально степени пространственного рассогласования между осями коллимации соответствующих блоков источника и приемника по известному способу [а.с. 1807309 СССР, кл. G 01 В 15/04, опубл. 07.04.93].
В процессе приближения точек локации к контролируемой поверхности механизмы поворотов 7 и 8 поворачивают коллиматоры блоков 1 и 2 по сигналам блока 19 так, что линии пересечения плоскостей коллимации соответствующих блоков источника и приемника непрерывно располагаются горизонтально. В режиме пеленгующих поворотов блоков 11 и 12 непрерывно формируются первые сигналы розбаланса блоками распознавания 20 и 21 на их первых выходах, под влиянием которых осуществляется пеленгование. Формирование первых сигналов розбаланса осуществляется путем сравнения интенсивностей выходных сигналов детекторов соответствующих блоков приемника. В процессе этого сравнения интенсивности сигналов детекторов автоматически корректируются с помощью вычислительного блока 19 так, что компенсируется отрицательное влияние неравномерности радиационного фона на точность пеленгования, который носит нестационарный характер и зависит от координат точек локации. Далее, блоки 1, 2, 11 и 12 останавливаются в исходных позициях первого этапа контроля поверхности материалов при нулевых значениях первых сигналов розбаланса в моменты, когда их оси коллимации ориентированы на центры соответствующих начальных участков котролируемой поверхности, т.е. когда точки локации совпадают с центрами начальных участков поверхности.
Через определенный интервал времени после начала вывода блоков источника и приемника в режим пеленгования начинаются по сигналам блока 19 обзорные повороты блоков 11, 12 и синхронизированные с ними обзорные повороты блоков 1, 2 относительно их первых осей с помощью механизмов поворотов 13, 14 и 3, 4 так, что точки локации перемещаются в первой контролированной вертикальной плоскости в одном направлении. При этом продолжаются пеленгующие повороты блоков источника и приемника относительно вторых их осей с помощью механизмов поворотов 5, 6, 15 и 16 и упомянутая выше автоматическая компенсация отрицательного влияния неравномерности радиационного фона путем соответствующего корректирования интенсивностей сигналов детекторов, что обеспечивает непрерывное совмещение точек локации с контролируемой поверхностью с высокой надежностью и точностью. Таким образом, точки локации перемещаются по первому профилю поверхности, который создан вследствие пересечения поверхности первой контролированной вертикальной плоскостью. При этом координаты точек локации, которые практически совпадают с контролируемой поверхностью, непрерывно определяются вычислительным блоком 19 по сигналам датчиков положения 9,10,17,18.
Скорость обзорных поворотов автоматически регулируется пропорционально сигналам на вторых выходах соответствующих блоков 20 и 21 распознавания, которые сформируются путем непрерывного определения суммарной интенсивности сигналов на выходах детекторов соответствующих блоков приемника. Такое регулирование позволяет повысить скорость контроля в случаях повышенной интенсивности отраженных сигналов, т.е. в случаях наиболее благоприятных условий контроля, без потерь в надежности контроля и сохранить высокую надежность контроля за счет автоматического снижения скорости контроля в случаях низкой интенсивности отраженных сигналов, т.е. в случаях неблагоприятных условий контроля. Благодаря этому существенно уменьшается требуемая активность источников ионизирующего излучения.
В процессе перемещения точек локации по контролируемой поверхности коллиматоры блоков 1 и 2 автоматически поворачиваются относительно третьих осей, совмещенных с осями коллимации, с помощью механизмов поворотов 7 и 8 по сигналам блока 19 таким образом, что линия пересечения плоскости коллимации каждого блока источника с контролируемой поверхностью практически совпадает по направлению с общей границей двух приемных зон соответствующего блока приемника. Такое регулирование поворотов коллиматоров относительно их осей коллимации позволяет создать условия минимума фоновой части выходных сигналов детекторов блоков приемника, которые по своей природе имеют случайный характер. Благодаря этому уровень флуктуации по отношению к полезной составляющей этих сигналов существенно снижается, что обеспечивает возможность снижения требуемой активносги источников ионизирующего нзлучення при сохранении высокой надежности пеленгования. Кроме того, снижение фоновой части выходных сигналов детекторов блоков приемника способствует повышению эффективности регулирования скорости обзорных поворотов блоков источника и приемника по сигналам блоков 20 и 21 на их вторых выходах, т.е. дополнительному снижению необходимой активности источников ионизирующего излучения.
Далее, в момент окончания контроля первого профиля поверхности материалов, начинается по сигналам блока 19 подготовка к контролю второго профиля поверхности материков. При этом блок 1 ориентируется своей осью коллимации в вертикальнй плоскости, которая проходит через центр контролируемой поверхности (центр третьего начального участка), блок 12 возвращается в первоначальное состояние ориентации его оси коллимации в вертикальной плоскости, которая проходит через центр контролируемой поверхности, блок 11 продолжает свои обзорные повороты в том же направлении до совпадения его оси коллимации с вертикальной плоскостью, которая проходит через центр четвертого начального участка контролируемой поверхности, а блок 2 поворачивается в противоположном направлении до совпадения его оси коллимации с вертикальной плоскостью, которая проходит через центр четвертого начального участка. Четвертый начальный участок выбирается на периферии контролируемой поверхности вблизи блоков 2 и 11 на равных расстояниях от блоков 2 и 11. После этого блоки 1,2,11,12 переключаются по сигналам блока 19 в режим вывода на исходные позиции второго этапа контроля - контроля второго профиля поверхности, который создан вследствие пересечения поверхности материалов второй контролированной вертикальной плоскостью. Эта плоскость расположена перпендикулярно первой вертикальной контролированной плоскости так, что относительно нее блок 1 находится симметрично блоку 12, а блок 2 - симметрично блоку 11. Вывод блоков 1, 2, 11, 12 на исходные позиции для контроля второго профиля поверхности осуществляется аналогично их выводу на исходные позиции первого этапа контроля с той лишь разницей, что повороты блока 1 синхронизованы с поворотами блока 12, повороты блока 2 синхронизованы с поворотами блока 11. В исходных позициях второго этапа контроля точки локации совпадают с центрами третьего и четвертого начальных участков контролируемой поверхности.
Через определенный интервал времени после начала вывода блоков источника и приемника на исходные позиции второго этапа контроля осуществляется контроль второго профиля поверхности аналогично контролю первого профиля поверхности. При этом одна из точек локации, которая создана вследствие пересечения между собой осей коллимации блоков 2 и 11, перемещается по второму профилю поверхности от четвертого начального участка поверхности до центра поверхности, а вторая точка локации перемещается по второму профилю от центра поверхности до периферийного участка поверхности вблизи блоков 1 и 12. После окончания контроля второго профиля поверхности материалов осуществляется по сигналам блока 19 подготовка к следующему циклу определения рельефа поверхности материалов путем возвращения блоков источника и приемника в первоначальное состояние.
В следующих циклах определения рельефа и уровня поверхности материалов скорость контроля поверхности постепенно повышается вследствие самонастройки механизмов поворотов 15 и 16 вместе с вычислительным блоком 19 на наиболее характерные особенности условий контроля. Самонастройка осуществляется путем автоматического введения соответствующих корректирующих сигналов, которые частично выполняют функции регулярных составляющих частей первых сигналов розбаланса. Такое корректирование работы механизмов поворотов 15 и 16 способствует существенному уменьшению отрицательного влияния случайного характера отраженного от контролируемой поверхности ионизирующего излучения на надежность контроля и дополнительному уменьшению необходимой активности источников ионизирующего излучения.
Важной особенностью предложенного устройства является возможность контроля периферийных участков поверхности, которые не находятся непосредственно под блоком источника или под блоком приемника. Эта особенность в условиях колошника действующей доменной печи способствует повышению надежности контроля и дополнительному снижению требуемой активности источников ионизирующего излучения по сравнению с известными аналогичными устройствами. Действительно, в условиях колошника доменной печи уровень материалов на периферии более высокий, т.е. более приближенный к блокам источника или приемника, и поэтому контроль периферийных участков поверхности непосредственно под блоком источника или приемника при высоком уровне засыпи материалов может сопровождаться чрезмерным повышением уровня радиационного фона и соответствующим снижением надежности контроля поверхности материалов.
Благодаря изложенным выше преимуществам предложенное устройство позволяет надежно контролировать большие по размеру поверхности материалов, в частности, в условиях сверхмощных доменных печей с диаметром колошника до 12 метров при активности источников ионизирующего излучения в несколько раз меньшей по сравнению с известными аналогичными устройствами, что дает возможность значительно повысить уровень радиационной безопасности эксплуатации устройства. Отсутствие ограничений в отношении размещения блоков источника и приемника и направления неподвижных осей этих блоков значительно упрощает решение технических вопросов, связанных с выбором наиболее рациональной схемы монтажа блоков источника и приемника на куполе доменной печи.
Следует рассмотреть основополагающую схему взаимодействия блока источника 1, содержащего коллиматор, механизмы поворотов 3, 5, 7 и датчик 9 положения, и блока приемника 11, содержащего коллиматор, механизмы поворотов 13, 15, датчик 17 положения, с участием в этом взаимодействии блока 20 распознавания сигналов и вычислительного блока 19. По этой схеме взаимодействия предложенное устройство позволяет последовательно контролировать, например, два профиля поверхности материалов в двух взаимно перпендикулярных вертикальных плоскостях. Одна из этих плоскостей размещена, например, по первому диаметру под углом 45o к диаметру, на концах которого могут быть размещены блоки 1 и 11, и создает первый профиль вследствие пересечения контролируемой поверхности, а вторая плоскость размещена по второму диаметру и создает второй профиль вследствие пересечения контролируемой поверхности. Контроль первого профиля начинается с того конца, который находится ближе к блоку 1. На первом этапе этого контроля, когда точка локации приближается к центру контролируемой поверхности, роль ведущего блока в отношении обзорных поворотов выполняет блок 1, а на заключительном этапе контроля первого профиля роль ведущего блока выполняет блок 11. Такое изменение ролей блоков 1 и 11 в данном случае позволяет уравнять условия контроля двух частей профиля. Контроль второго профиля поверхности осуществляется аналогично контролю первого профиля. Если есть возможность ограничиться контролем поверхности только в одной вертикальной плоскости, то наиболее целесообразно расположить эту плоскость перпендикулярно диаметру, на концах которого могут быть размещены блоки 1 и 11. Организация работы предложенного устройства по этой основополагающей схеме взаимодействия позволяет вдвое уменьшить общую активность источников ионизирующего излучения и при этом сохранить высокую надежность контроля поверхности материалов на колошнике доменной печи в двух вертикальных плоскостях при диаметре колошника до 7 метров или в одной вертикальной плоскости при диаметре колошника до 9 метров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСПРЕДЕЛЕНИЯ МАТЕРИАЛОВ В ДОМЕННОЙ ПЕЧИ | 1999 |
|
RU2165460C2 |
| СПОСОБ ВЕДЕНИЯ ДОМЕННОЙ ПЛАВКИ | 1999 |
|
RU2165980C2 |
| Способ определения рельефа и уровня поверхности материалов | 1990 |
|
SU1807309A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И УРОВНЯ ПОВЕРХНОСТИ МАТЕРИАЛОВ | 1980 |
|
SU978672A1 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО | 2001 |
|
RU2239701C2 |
| СПОСОБ ЗАКЛАДКИ ВЫРАБОТАННОГО ПРОСТРАНСТВА ПРИ ПОДЗЕМНОЙ ГАЗИФИКАЦИИ ТВЕРДОГО ТОПЛИВА | 1992 |
|
RU2072037C1 |
| Способ определения рельефа и уровня поверхности | 1982 |
|
SU1065686A1 |
| Устройство радиометрического дифференциального измерения толщины | 1990 |
|
SU1723435A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1999 |
|
RU2178187C2 |
| РЕНТГЕНОВСКИЙ РЕФЛЕКТОМЕТР | 1998 |
|
RU2129698C1 |
Изобретение относится к измерительной технике, в частности к измерению контуров поверхности с помощью ионизирующего излучения, и может быть использовано для определения рельефа и уровня поверхности шихтовых материалов на колошнике доменной печи. Для определения рельефа и уровня поверхности материалов коллиматоры блоков источника выполнены подвижными с механизмами поворотов относительно осей коллимации и введены новые связи между механизмами поворотов, благодаря чему обеспечивается снижение необходимой активности источников ионизирующего излучения в несколько раз при сохранении высокой надежности контроля поверхности и повышение радиационной безопасности условий эксплуатации устройства. 1 ил.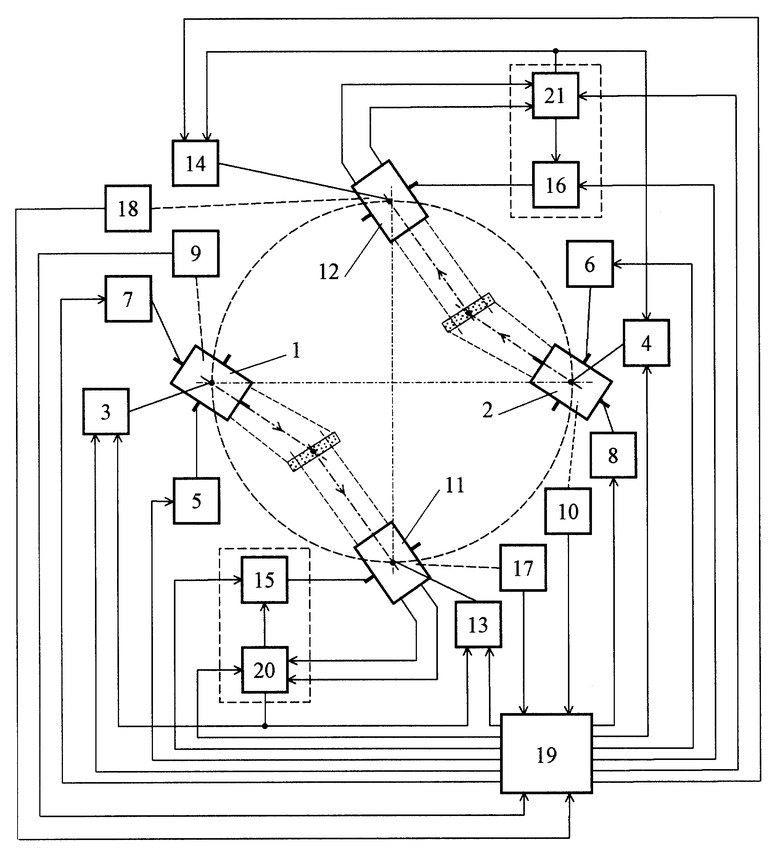
Устройство для определения рельефа и уровня поверхности материалов, содержащее блоки источника и приемника ионизирующего излучения с коллиматорами, механизмами поворотов и датчиками положения, вычислительный блок, подключенный своими входами и выходами соответственно к выходам датчиков положения и входам механизмов поворотов, отличающееся тем, что коллиматор блока источника выполнен подвижным относительно оси коллимации с механизмом поворота, подключенным своим входом к соответствующему выходу вычислительного блока.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И УРОВНЯ ПОВЕРХНОСТИ МАТЕРИАЛОВ | 1980 |
|
SU978672A1 |
| US 3792252, 12.02.1974 | |||
| Способ определения рельефа и уровня поверхности материалов | 1990 |
|
SU1807309A1 |

