Предлагаемое изобретение относится к технике контроля за состоянием степени износа поверхностей качения и гребней колес подвижного состава.
На практике наибольшее применение имеет контроль износа поверхностей качения колес и гребней колес вручную с помощью шаблонов и специальных штангенциркулей. Существуют также оптические методы контроля степени износа гребней колес, основанные на использовании блика, отраженного от изношенной поверхности гребня колеса. Оптические методы измерения и контроля поверхностей качения колес железнодорожных вагонов автору не известны.
Например, известно "Устройство для контроля износа гребня колесной пары подвижного состава". А.с. N 1211128, МКИ B 61 K 9/12, G 01 B 15/02, 21/02. В устройстве реализован способ контроля, заключающийся в использовании оптического излучения. При попадании неподвижного луча излучателя на движущуюся изношенную поверхность гребня колеса, и при условии, что она имеет зеркальный блеск, а угол предельного вертикального подреза гребня равен ожидаемому, на фотоприемник поступает сигнал.
К причинам, препятствующим достижению указанного ниже результата при использовании известного устройства, относится то, что в известном устройстве:
- фиксируется только предельный износ гребня колеса,
- нет никакой информации о профиле поверхности качения колеса,
- не учитываются ударные нагрузки и вибрация, возникающие при движении состава.
Известен также "Способ измерения износа гребня вагонного колеса о рельс" по японской заявке N 53-43312, заявленной 3.07.72, публ. 18.11.78 N 4759575, N 6-1083, Ниппон кокую тэпудо, МКИ G 01 B 11/24, G 01 B 11/06, НКИ 106F0, 106C34.
Способ заключается в том, чти во время движения железнодорожного состава на контролируемые поверхности гребней колес направляют узкий горизонтальный луч от источника света, установленного рядом с железнодорожным полотном, отраженный от изношенной поверхности гребня колеса световой блок принимается фотоэлектрическим преобразователем телевизионной камеры, преобразуется в электрические сигналы со сканированием по строкам. Электрические сигналы подаются на блок обработки, выполняющих их пересчет в действительные размеры колеса и гребня. Износ гребня колеса измеряется в результате сравнения эталонного и контролируемого изображений поперечных сечений колеса с гребнем.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, принятого за прототип, относится к то, что в описываемом способе принято строго определенное направление луча, а именно перпендикулярно рельсу, что позволяет контролировать только износ гребня, а не всю поверхность качения колеса, ничего не заявляется о защите измерительной системы от ударных нагрузок или их учете.
Предлагаемое автором изобретение ставит перед собой решение следующих задач:
- бесконтактный динамический контроль степени износа полного профиля рабочих поверхностей колес подвижного состава, который складывается из образующей поверхности качения колеса и образующей поверхность гребня колеса.
- обеспечение динамической разгрузки измерительной системы и возможности контроля профиля при этом.
При осуществлении изобретения может быть получен следующий технический результат: оперативность контроля износа полного профиля поверхности качения колес и передачи результатов контроля в автоматизированной системе управления подвижным составом.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном способе бесконтактного динамического контроля износа колес подвижного состава облучают контролируемую поверхность источником света и принимают отраженную картину фотоприемником, при этом излучатель с фокусирующей оптикой и матричный фотоприемник с объективом помещают на общем основании, стабилизируют пространственное положение оптических осей излучателя и приемника, обеспечивая тем самым возможность контроля, облучают контролируемую поверхность оптическим лучом в виде последовательности коротких импульсов определенной частоты, частоту импульсной модуляции задают величиной, пропорциональной скорости движения колеса, скорость движения колеса определяют по величине перемещения контрастных элементов изображения колеса на фотоприемной матрице за определенный промежуток времени, помещают контрастную метку в виде узкой полосы на головке рельса, по запаздыванию видеосигнала от метки судят об изменениях высоты головки рельса и по разнице полученной последовательности световых сигналов, скорректированной с учетом изменения высоты головки рельса относительно оптических осей излучателя и приемника, и эталонной последовательности световых сигналов судят о степени износа поверхности качения колеса и поверхности гребня колеса, т.е. о степени износа рабочего профиля поверхностей качения колес.
Достижение технического результата возможно благодаря стабилизации оптической системы, импульсному характеру облучения с частотой, задаваемой в зависимости от скорости учету, влияния ударных нагрузок и перемещений, после чего просчитывают профиль всей контролируемой поверхности и сравнивают его с этанолом.
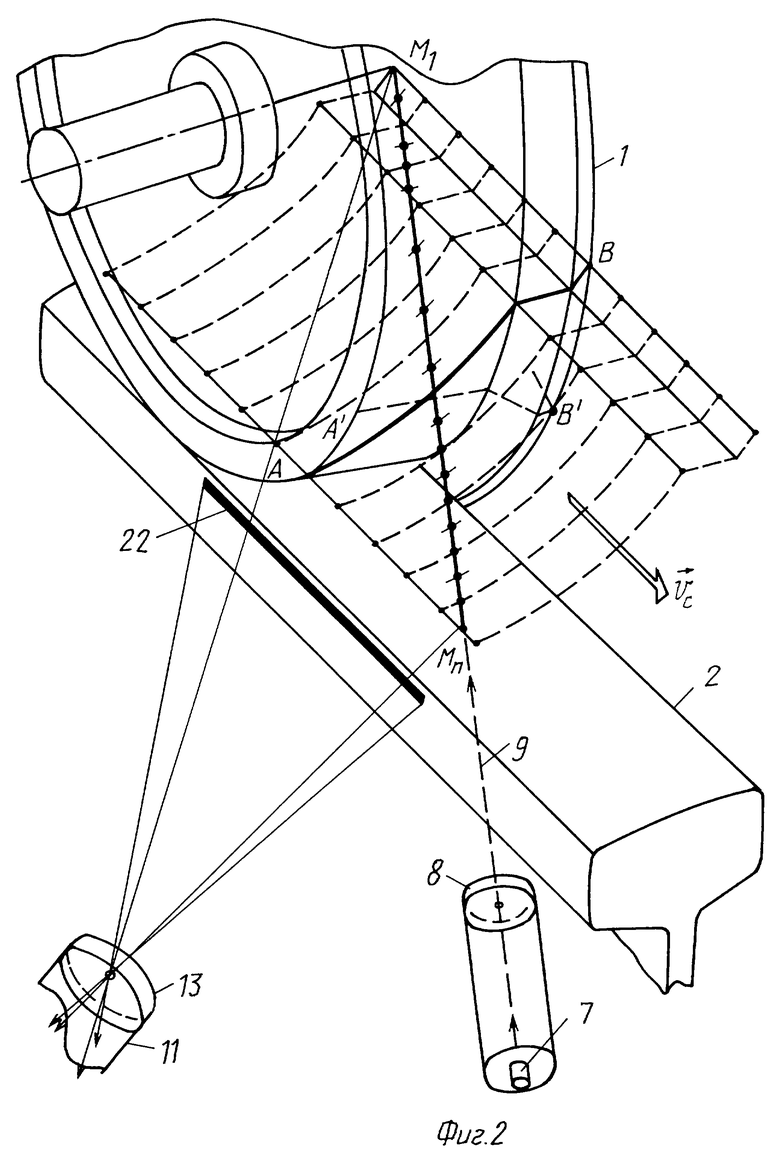
Реализация способа предлагается, например, на следующем устройстве, представленным на фиг. 1.
Колесо 1, износ полного профиля рабочих поверхностей качения которого контролируется, катится по рельсу 2. Рама 3 с размещенным на ней электронным оборудованием, установлена при помощи независимой подвески в виде шарнирного параллелограмма 4 на жестком основании 5. На раме 3 закреплен облучающий блок 6, состоящий из источника светового излучения лазера 7 и коллимирующего объекта 8. Источник излучения формирует неподвижный лазерный луч 9. Источник излучения подключен к выходу блока формирователя 10 импульсов питания лазера.
На той же раме 3 установлен корпус приемного устройства 11, включающий в себя матричный фотоприемник 12 с фокусирующим объективом 13. Приемное устройство 11 подключено к входу блока управления 14 матричным фотоприемником и вывода видеосигнала. Выход блока управления 14 подключен к устройству селекции сигнала 15, выход устройства селекции подключен к входу аналого-цифрового преобразователя сигналов 16. Выход аналого-цифрового преобразователя подключен к входу вычислительного устройства 17, состоящего из блока постоянной памяти 18 (ПЗУ), блока оперативной памяти 19 (ОЗУ) и контроллера преобразователя скорости 20 движения колеса. С контроллера 20 подается сигнал на вход блока формирования импульсов частоты модуляции 10 источника излучения. С вычислителя 17 сигнал поступает в устройство передачи информации 21.
Представленное на фиг. 1 устройство работает в соответствии с заявляемым способом контроля следующим образом.
Лазер 7, помещенный на общей раме 3 с матричным приемником 11, через объектив 8 облучает движущееся колесо 1.
Коллимированный луч 9 при небольшом диаметре светового пучка (на фиг. 2) направляется на контактируемую поверхность колеса с таким расчетом, чтобы при движении колеса он пересекал всю контролируемую рабочую поверхность профиля колеса. Искажение профиля колеса AB приводит к соответствующему изменению пространственного положения световых пятен по оси луча и его изображения на матричном приемнике. При этом пространственное положение оптических осей передатчика и приемника стабилизируется, а динамическую разгрузку системы от ударов, возникающих при движении поезда, обеспечивают за счет независимой подвески в виде шарнирного параллелограмма 4.
Облучение колеса производят последовательностью импульсов тока продолжительностью 1 - 300 мкс, задаваемой формирователем импульсов 10, и с частотой следования, задаваемой контроллером преобразования скорости движения колеса 20 в пропорциональное значение частоты модуля излучения в диапазоне, например, 200 - 20000 Гц. Благодаря импульсному характеру излучения получают регистрационную картину расположения световых пятен за сколь угодно малый промежуток времени при условии синхронизации этого промежутка времени с экспозицией фотоприемника.
Скорость движения колеса определяется по скорости движения контрастных элементов изображения фрагментов колеса или других частей вагона, например по смещению этих элементов за время одного полукадра при черезстрочной развертке. Эту операцию выполняют при помощи вычислителя 17, куда в оцифрованном виде вводится видеосигнал и синхроимпульсы из блока управления матричным фотоприемником 14.
Центр поля зрения телекамеры или приемного устройства 12 на основе ПЗС матрицы с числом элементов по горизонтали и вертикали, например 512 х 512, располагают таким образом, чтобы в кадр полностью поместился весь отрезок светового луча от начала его попадания на контролируемый участок профиля до конца, и участок головки рельса 2 с продольной меткой 22, имеющей высокий коэффициент отражения светового потока. Контрастная метка 22 может быть дополнительно освещена фарой, на чертеже не показанной.
Изображение на матричном приемнике контрастной метки 22 располагают под некоторым острым углом, например, в диапазоне 5 - 20o к направлению строк, путем поворота матричного приемника вокруг оптической оси, и, по запаздыванию видеосигнала от контрастной метки в заранее выбранной строке, судят об изменении высоты головки рельса и колеса в системе отсчета, связанной с динамически разгруженной рамой.
Используя один из множества возможных алгоритмов, учитывают поправку на изменение высоты головки рельса в полученной пространственной последовательности световых пятен, т.е. сигналов, сравнивают эту последовательность с эталонной, хранящейся в ПЗУ (18) и судят об искажении профиля колеса и, следовательно, о степени износа.
Таким образом, изобретение обеспечивает решение задачи по одновременному контролю износа всей рабочей поверхности колеса при обеспечении динамической разгрузки измерительной системы и при любой скорости движения подвижного состава. Предлагаемое автором изобретение позволит осуществлять оперативный контроль и передачу данных в автоматизированную систему управления подвижным составом, а, значит, приблизиться к решению актуальной на настоящий момент проблемы по повышению техногенной безопасности на железной дороге.
Перечень фигур чертежей к изобретению:
Фиг. 1 - функциональная схема.
Оптикоэлектронная система для контроля износа колес подвижного состава.
Фиг. 2 - геометрия переноса световых пятен в пространстве предметов на картинную плоскость матричного приемника.
Заявленный способ может быть реализован в производстве измерительной техники, основанном на оптическом приборостроении, а более конкретно - к оптическим методам измерения и контроля поверхностей качения колес. Заявленный способ заключается в облучении полного профиля рабочих поверхностей колес оптическим лучом в виде последовательности коротких импульсов определенной частоты, пропорциональной скорости движения колеса, и принятии отраженного сигнала на чувствительной поверхности матричного фотоприемника в виде последовательности световых пятен с последующей передачей данных в автоматизированную систему и сравнением их с эталонным значением. Технический результат - оперативное и точное измерение профиля рабочих поверхностей колес подвижного состава, двигающегося с определенной скоростью с учетом влияния ударных нагрузок и перемещений, достигается благодаря применению матричного фотоприемника нового поколения и использованию стабилизированной оптической системы. 2 ил.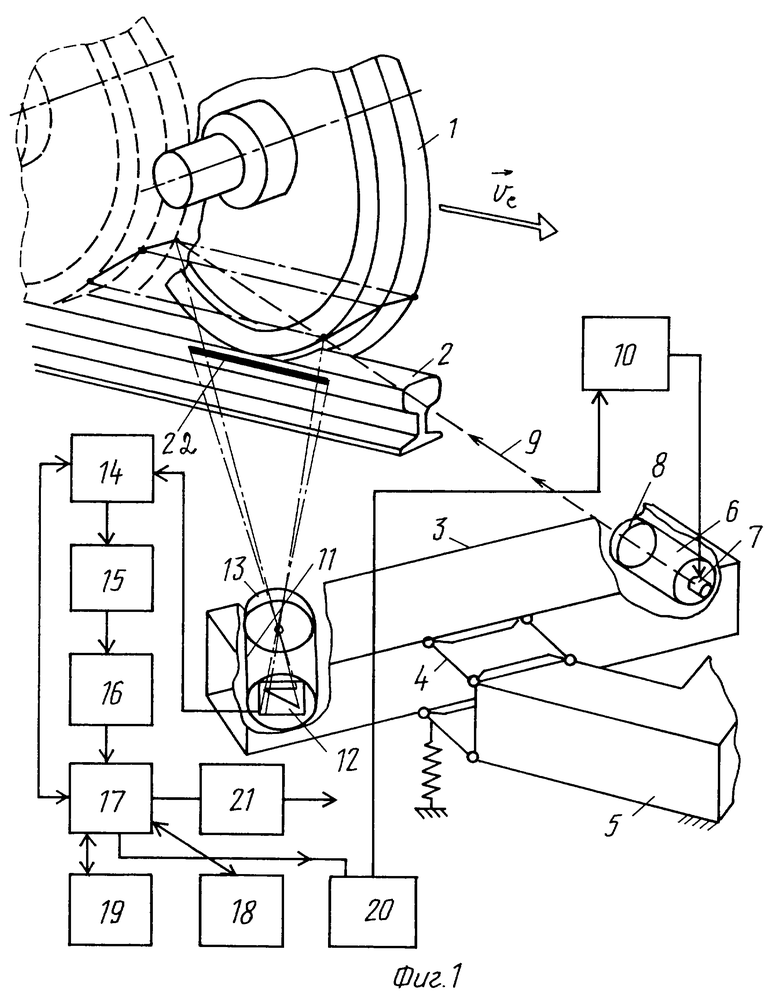
Способ бесконтактного динамического контроля износа колес железнодорожных вагонов, заключающийся в том, что облучают контролируемую поверхность источником света и принимают отраженную картину фотоприемником, отличающийся тем, что излучатель с фокусирующей оптикой и матричный фотоприемник с объективом помещают на общем основании, стабилизируют пространственное положение оптических осей излучателя и приемника, облучают контролируемую поверхность оптическим лучом в виде последовательности коротких импульсов, частоту импульсной модуляции задают величиной, пропорциональной скорости движения колеса, скорость движения колеса определяют по скорости движения контрастных элементов изображения колеса на фотоприемнике, помещают контрастную метку в виде узкой полосы на головке рельса, по запаздыванию видеосигнала от метки судят об изменениях высоты головки рельса, по разнице полученной последовательности световых сигналов, скорректированной с учетом изменения высоты головки рельса относительно оптических осей излучателя и приемника, и эталонной последовательности световых сигналов судят о степени износа рабочего профиля поверхности качения колес.
| EP 0228500 A2, 15.07.1987 | |||
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Устройство для контроля износа гребня колесной пары подвижного состава | 1984 |
|
SU1211128A1 |
| СПОСОБ КОНТРОЛЯ ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСА ПРИ ДВИЖЕНИИ РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2122956C1 |
| RU 95102172 A2, 20.11.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ИЗНОСА ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА | 1996 |
|
RU2085424C1 |
| US 4908782 A, 13.03.1990. | |||
