Изобретение относится к области нриборостроения.
Датчики углов наклона с комненсатором влияния инерционных сил устанавливаются в ирофилографах для выдачи интегрирующему звену угловых данных, лишенных ошибки, вызываемой ускорениями при перемещении ирофилографа с изменяющейся скоростью.
Действие комиенсатора влияния инерцион1;ых сил основано на том, что к датчику углов наклона маятникового типа нри изменении скорости прокатывания профилографа прикладывается компенсационный момент, равный по величине моменту от сил инерции и противоположный этому моменту по знаку,
Известны датчики углов наклона, содержащие измерительный астатический маятник, выполненный в виде упругой пластины с зеркалом, укрепленным на ее верхнем конце, п физический маятник, служащий механическим компенсатором влияния инерционных сил.
С целью упрощения конструкции и регулировки датчика с компенсатором предлагается выполнить измерительный маятник астатичесКИМ на упругой подвеске, нижний конец которой закреплен к физическому маятнику вблизи его центра тяжести, а центр тяжести измерительного маятника должен находиться на уровне между осью подвески физического
маятника и местом закрепления упругой пластины.
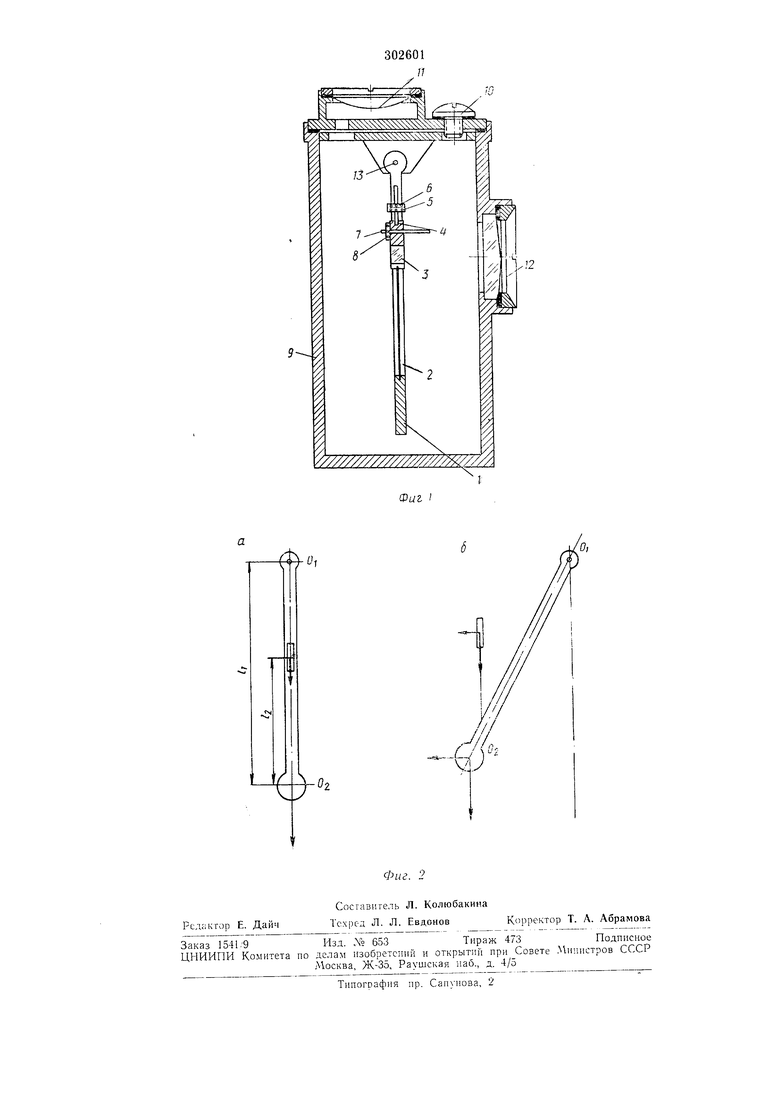
На фиг. 1 изображен датчик углов наклона с комненсатором, конструктивная схема; на фиг. 2-принцип действия компенсатора.
Датчик углов наклона с компенсатором влияния инерционных сил содерл-;ит маятник / с массой nil п расстоянием от оси О подвеса до центра тяжести массы равном /х. В центре тяжести маятника 1 укреплен конец упругой пластины 2.
На верхнем ее конце установлен отражательный элемент 3, винт 4 с гайкой 5 и контргайкой 6 для регулировки компенсации влияния инерционных сил и винт 7 с контргайкой 5 для регулирования наклона отражательного элемента в исходном полон-:ении астатического маят1н ка. Система помещена в корпус 9. Для демпфирования использован жидкостный демпфер, например полиметилсилоксановая жидкость, которая полностью заполняет корпус 9 датчика. Для выхода пузырьков воздуха при заливке датчика служит отверстие, закрываемое после заливки винтом 10. Для устранення разности давлений при изменении температуры служит эластичная диафрагма //. Выдача угловых данных осуществляется с помощью автоколлпмационной системы, объективом которой служит линза 12. Маятник / может быть подвешен на любой подвеске,
обеспечивающей высокую чувствительность датчика. На схеме он поворачивается относительно оси 13.
Принцип действия компенсатора основан на том, что при воздействии ускорений физический маятник и астатический (измерительHbiii) разворачиваются так, что отражательный элемент (плоское зеркало или нрямоугольиая призма, расположенная гипотенузой гранью в параллельном ходе автоколлимациоиной схемы) перемещается параллельно самому себе, и световое пятно в фокальной плоскости объектива не смещается. Время подхода к новому по.чожению равновесия маятников прн воздействии ускорения должно быть одинаковым и в апериодическом режиме. Это достигается соответствуюн1им соотноН1ением площадей сопротивления демпфирующей жидкости маятников и соответствующей ее вязкостью.
При измерении угла наклона система работает как обычный маятниковый датчик в апериодическом режиме.
Для компенсации влияния ускорений необходимо, чтобы физический маятник иод действием ускорений повернулся относительно Oj на тог же угол, что и отражательный элемент, установленный на верхнем конце упругой пластипы пзмерительного маятника. При этом сумма моментов относительно оси иоворота Oi должна быть равна нулю.
На фиг. 26 показан датчик в установившемся режиме.
Для комиенсации влияния инерционных сил подвижная система должна работать в
анериодическом режиме с выполнением условий:
gllm.
; P.
ГnuL,
48
L + m-:)
где m - масса физического маятника;
m - масса астатического (измерительного) маятника;
g - ускорение силы тяжести; /I - длина физического маятника; /2 - длина астатического маятника; b-ширина унругой пластины; /г - толщина унругой пластины;
Е - модуль унругости упругой пластины; л 3,14; PZ т ёПредмет изобретения
Датчик углов наклона, содержащий измерительный астатический маятник, выполненный в виде упругой пластины с зеркалом, укрепленным на ее верхнем конце, и физический маятник, служащий механическим компенсатором влияния инерционных сил, отличающийся тем, что, с целью упрощения конструкции и регулировки компенсатора, в нем
нижний конец унругой нластины закреплен вблизи центра тяжести физического маятника, а центр тяжести измерительного маятника расположен между осью подвески физического маятника и местом закрепления упругой
нластины.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАТЕНТНО-ТЕ;^^;? "^1^МБИБЛИЭ ':-7iAБ. Г. Смирнов | 1970 |
|
SU284327A1 |
| ДАТЧИК УГЛОВ НАКЛОНА | 1970 |
|
SU282677A1 |
| ДАТЧИК УГЛОВ НАКЛОНА | 1971 |
|
SU306346A1 |
| Устройство для определения угла наклона подвижного объекта | 1983 |
|
SU1068708A1 |
| Устройство для определения углов наклона подвижных объектов | 1976 |
|
SU727992A1 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
| Датчик угла наклона | 1976 |
|
SU682761A1 |
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| Устройство для измерения углов наклона | 1986 |
|
SU1530899A1 |
| Датчик механических колебаний | 1982 |
|
SU1096591A1 |