(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ НАКЛОНА ПОДВИЖНЫХ ОБЪЕКТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла наклона подвижного объекта | 1989 |
|
SU1737272A1 |
| ПАТЕНТНО-ТЕ;^^;? "^1^МБИБЛИЭ ':-7iAБ. Г. Смирнов | 1970 |
|
SU284327A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2065572C1 |
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| Наклономер | 1990 |
|
SU1812427A1 |
| ПАТЕНТНО-ТЕХН;14ЕГКАЯБИБЛИОТЕКАБ. Г. Смирнов | 1971 |
|
SU302601A1 |
| Радиальный наклономер | 1986 |
|
SU1530901A1 |
| Датчик угла наклона | 1976 |
|
SU682761A1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
:.. i . Изобретение относится к области приборостроения и, в частности, к устройствам для измерения угла наклона к горизонту подвижных объектов, например автоматизированных сельскохозяйственных машин. Известны датчики углов наклона, содержащие физический маятник с компенсатором влияния инерционных сил, действие которого закл чается в приложении к маятнику компенсацион ного момента, равного по величине моменту го ризонтальной составляющей силы Инерциии, дей ствующей на тело маятника, и противополож-. ного ему по знаку. Вертикальная составляющая сил инерциий, действующих на тело маятника, воспринимается соответствующей реакцией его опоры и не вызывает отклонения тела маятника от.равновесного положения 1. Недостатком известного решения является; сложность конструкции, включающей в себя последовательно соединенные: датчик поступательной скорости объекта, дафференциальное звено для вычисления ускорения и моментный двигатель для приложения к телу маятника компенсационного момента. Такая конструкция ненадежна в работе в полевых условийх. Известные наклономеры маятникового типа с компенсаторами действия инерционных сил 2 и 3 .используемые на подвижных объектах, также имеют более сложную конструкцию и меньшую надежность работь, Ближайца1м к описываемому изобретеш1ю по технической сущности и достигаемому результату является наклономер для движущихся объектов 4. содержащий корпус, маятник, преобразователь, и компенсатор действия инерциопньос сил, выполненный в виде груза, имеющего возможность перемещения под действием сип инерции в плоскости качания маятника перпендикулярно линии отвеса и центрируемого пружинами, опирающимися на стенки корпуса. В этом наклономере центр тяжести груза компенсатора находится выше центра оси подвеса маятника, а груз снабжен демпфирующим устройством.
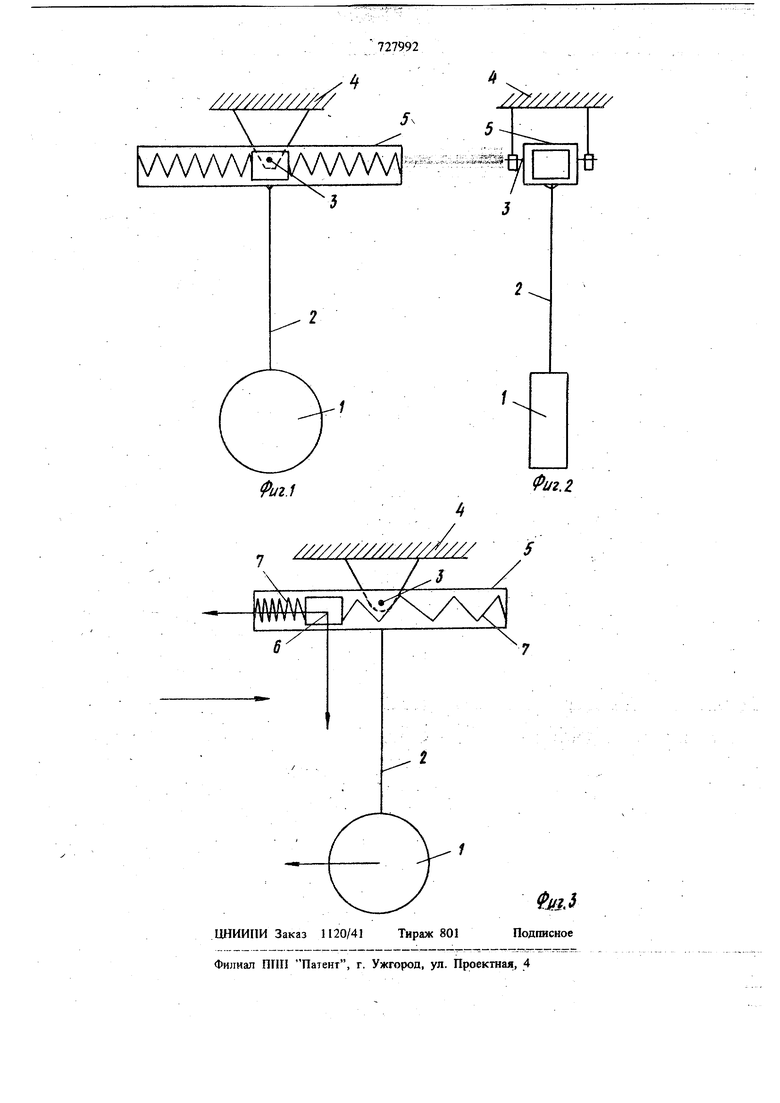
бпИсываемое устройство имеет более простую конструкцию и большую точность как в статическом, так и в диналтческом режимах, что достигнуто тем, что компенсатор в наклономере жестко закреплен на маятнике так, что центр тяжести подвижного груза совмещен с центром оси подвеса маятника. Сл1ещение подвижного груза под действием сил инерции в ту или иную сторону вызьюает появление соответствующего момента силы тяжести этого груза, ур1авновешивающего действие момента сил инерции, приложенных к телу маятника. На фиг. 1 и 2 изображена схема предлагаемого наклономера в двух Проекциях; на фигЗ наклономер при действии на его подвижную систему силы инерции.
Наклономер содержит маятник с грузом 1, подаёшенным на рычаге 2 посредством шарнира с осью вращения 3 к корпусу 4. На рычаге 2 закреплена сбалансированная относительно оси подвеса коробка 5, содержащая подвижный инерционный груз 6, центрируемый двумя противодействующими пружинами 7. Груз 6 имеет возможность перемещаться в плоскости качания маятника по линии, перпендикулярной отвесной линии.
В отсутствие ускорения контролируемого объекта и соединенного с ним корпуса наклономера на груз 1 маятника и на подвижный груз 6 компенсатора не действуют силы инерции, центр массы груза 1 маятника находится на линии гравитационной вертикали, проходящей через ось вращения 3, а центрмассы подвижного груза 6 совпадает с осью 3 вращения маятника и моменты сил тяжести обоих грузов равны нулю. При зтом наклон объекта к горизонту сопровождается соответствующим изменением положения корпуса 4 наклономера относительно груза 1 неподвижного маятника и выдачей сигнала, пропорционального наклону объекта.
При изменении скорости движения объекта ускорение корпуса наклономера непрерьшно меняется и на подвижную систему действует приложенная в его центре масс мгновенная сила инерции.
Смещение подвижного груза зависит от его массы, жесткости центрирующих пружин и величины ускорения. Указанные величины находятся в следующей зависимости:
2
п nrii .
д. т - масса подвижной части маятника;
-расстояние от оси подвеса до центра масс подвижной части маятника;
-масса подвижного груза компенсатора ;
-жесткость центрирующих пружин;
-ускорение земного притяжения.
образом, в описываемом наклонот быть достигнута компенсация дейинерции на измерительный маятник.
Формула изобретен
и я
Устройство для определения углов наклона подвижных объектов, содержащее корпус, маятник, преобразователь и компенсатор действия инерционных сил, выполненный в виде груза, имеющего возможность перемещения под действием сил инерции в плоскости качания маятника перпендикулярно . линии отвеса и центрируемого пружинами,, опирающимися на стенки корпуса, отличающееся тем, что, с целью иовыщения точности, компенсатор жестко закреплен на маятнике так, что центр тяжести подвижного груза совмещен с центром оси подвеса маятника.
Источники информации, принятые во внимание при экспертизе
////////////
vT.
WVWV M6AA/W
/////////
5
-Q«ii SSil //г./
//////////////////// 5
Фиг,г
