Изобретение относится к области маркшейдерского приборостроения н может быть использовано, в частности, в профилографах для выдачи интегрирующему звену угловых данных с исключением ошибок, вызванных ускорениями при перемепдении нрофилографа с изменяюш,ейся скоростью.
Известны устройства для определения углов наклона, снабженные механическими компенсаторами для исключения влияния ускорений на результаты измерений.
Известны также датчики углов наклона маятникового типа с компенсаторами влияния инерционных сил, выполненными в виде подвижной катушки - рамки с обмоткой, находящейся в однородном магнитном поле.
Преимущество описываемого датчика состоит в том, что он имеет более простую конструкцию, не связан с колесом тележки профилографа и позволяет практически компенсировать влияние инерционных сил.
Это достигается тем, что комненсатор датчика выполнен в виде упругой пластины, нижний конец которой прикреплен к измерительному маятнику вблизи оси его поворота, а на верхнем конце закреплен груз, причем выполнено условие, что i/j и
где: /«1 и т - грузы маятника и компенсатора, /1 и /2 - приведенные длины маятшпча
и упругой пластины,
, &, h - модуль упругости, ширина и
толщина упругой пластинысоответственно, q - ускорение силы тяжести.
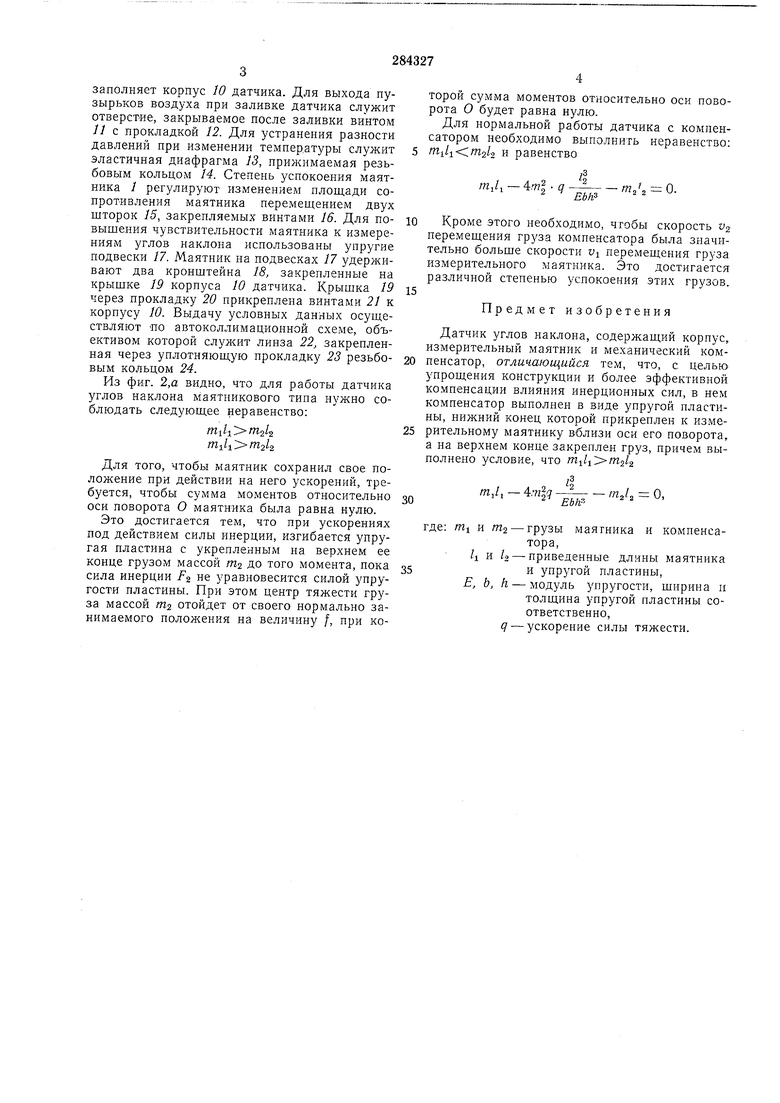
Иа фиг. 1 показана конструктивная схема описываемого датчика; на фиг. 2 - принцип действия компенсатора.
Датчик содержит маятник 1 массой т и расстоянием от оси О подзеса до центра его
тяжести, равным /j. На верхнем конце маятника / жестко укреплена упругая пластинка 2 с грузом 3 массой т на верхнем ее конце. Расстояние от оси О подвеса до центра тяжести массы т2 равно /2.
Регулировка компенсатора производится перемещением вдоль установленного на маятнике / винта 4 и гаек 5, 6. Винт 7 с контргайкой S служит для регулировки наклона зеркала 9, жестко закрепленного на маятнике / при юстировке датчика, что осуществляется смещением центра тяжести маятника при ввинчивании или вывинчивании винта 7. Для демпфирования использован жидкостный демпфер. В качестве демпфирующей жидкости можно использовать,
заполняет корпус 10 датчика. Для выхода пузырьков воздуха при заливке датчика служит отверстие, закрываемое после заливки винтом 11 с прокладкой 12. Для устранения разности давлений при изменении температуры служит эластичная диафрагма 13, прижимаемая резьбовым кольцом М. Степень успокоения маятника 1 регулируют изменением площади сопротивления маятника перемещением двух шторок 15, закрепляемых винтами 16. Для повышения чувствительности маятника к измерениям углов наклона использованы упругие подвески 17. Маятник на подвесках 17 удерживают два кронштейна 18, закрепленные на крышке 19 корпуса 10 датчика. Крышка 19 через прокладку 20 прикреплена винтами 21 к корпусу 10. Выдачу условных данных осуществляют ПО автоколлимационной схеме, объективом которой служит линза 22, закрепленная через уплотняющую прокладку 23 резьбовым кольцом 24.
Из фиг. 2,а видно, что для работы датчика углов наклона маятникового тнпа нужно соблюдать следующее неравенство:
/ni/i m2/2
Для того, чтобы маятник сохранил свое положение при действии на него ускорений, требуется, чтобы сумма моментов относительно оси поворота О маятника была равна нулю.
Это достигается тем, что при ускорениях под действием силы инерции, изгибается упругая пластина с укрепленным на верхнем ее конце грузом массой /П2 до того момента, пока сила инерции F не уравновесится силой упругости пластины. При этом центр тяжести груза массой /П2 отойдет от своего нормально занимаемого полол ения на величину Д при которой сумма моментов относительно оси поворота О будет равна нулю.
Для нормальной работы датчика с компенсатором необходимо выполнить неравенство: и равенство
/Wj/i - 4.п| q
- mJ., - 0.
Ebh
Кроме этого необходимо, чтобы скорость v перемещения груза компенсатора была значительно больше скорости uj перемещения груза измерительного маятника. Это достигается различной степенью успокоения этих грузов.
Предмет изобретения
Датчик углов наклона, содержащий корпус, измерительный маятник и механический компенсатор, отличающийся тем, что, с целью упрощения конструкции и более эффективной компенсации влияния инерционных сил, в нем компенсатор выполнен в виде упругой пластины, нижний конец которой прикреплен к измерительному маятнику вблизи оси его поворота, а на верхнем конце закреплен груз, причем выполнено условие, что mi/i /n2/2
з
/п,/, - 4.и|(7 - «2/2 О,
ЕЪК
30
грузы маягника и компенсатора,
приведенные длины маятника и упругой пластины,
модуль упругости, ширина н толщина упругой пластины соответственно, ускорение силы тяжести.
(W
2/
20
,
1
(5)0
F,fr,,a
p,--m,q
fe W7
Фиг-2
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВ НАКЛОНА | 1970 |
|
SU282677A1 |
| ПАТЕНТНО-ТЕХН;14ЕГКАЯБИБЛИОТЕКАБ. Г. Смирнов | 1971 |
|
SU302601A1 |
| Устройство для определения угла наклона подвижного объекта | 1983 |
|
SU1068708A1 |
| Устройство для определения углов наклона подвижных объектов | 1976 |
|
SU727992A1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2022 |
|
RU2807094C1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Устройство для измерения углов наклона объекта | 1990 |
|
SU1760319A1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |

