Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения горизонтальных составляющих механических колебаний, в частности в сейсмометрии и виброметрии.
Известны низкочастотные маятниковые виброметры, содержащие астатич:еский маятник, т.е. маятник с дополнительными упругими связями, служащий для измерения горизонтальных составляющих вибрации Ц 1
Механоэлектрическим преобразователем датчиков, выполненных по такой конструктивной схеме, обычно являются тензоэлементы, наклеенные на плоскую пружину и воспринимающие ее деформацию.
Недостатком таких датчиков является низкая чувствительность.
Повышение чувствительности достигается с применением механоэлектри ческих преобразователей, содержащих пьезоэлементы, работающие на изгиб.
Недостатком таких пьезоэлементов является их малая прочность. Для устранения этого недостатка преобразователь изготавливают в виде склеенных между собой пьезокерамической и упрочняющей стальной пластин. Однако частота собственных колебаний датчиков с таким преобразователем получается высокой и это служит препятствием для существенного увеличения чувствительности в области более низких частот.
Наиболее близким к изобретению техническим решением является датчик механических колебаний, содержащий корпус, астатический маятник, включающий инерционную массу и преобразователь 2 .
Известный датчик предназначен для измерения горизонтальных составляющих механических колебаний.
В этом датчике преобразователь выполнен в виде вертикальной консоли, упруго закрепленной на корпусе и соединенной с пьезробразователяivm, причем эта консоль связана с астатическим маятником посредством кольцевого шарнира. Упругое закрепление консоли.вызывает снижение чувствительности датчика, а кольцевой шарнир не Обеспечивает сохранности датчика при сильных ударах.
Целью изобретения является повышение чувствительности и надежности датчика механических колебаний.
Поставленная цель достигается тем, что в датчике механических колебаний, содерл ащем корпус, астатический, маятник, включающий инерционную массу и преобразователь, преобразователь выполнен в виде консольного пьезоэлемента, закрепленного одним концом на корпусе, продольная ось которого пересекает ось вращения
астатического маятника, а между незакрепленным концом преобразователя и инерционной массой астатического йаятника горизонтально установлен плоский упругий элемент.
На фиг. 1 схематически изображен датчик механических колебаний, в котором консольный пьезоэлемент закреплен в верхней части корпуса; на фиг. 2 - то же, консольный пьезоэлемент закреплен в нижней части корпуса.
Датчик механических колебаний содержит корпус 1, на котором закреплен один конец консольного пьезоэлемента 2, расположенного вертикально с возможностью перемещения вдоль своей продольной оси. Незакрепленный конец пьезоэлемента.-2 расположен внутри цилиндрического углубления инерционной массы 3 астатического маятника. Маятник связан с корпусом 1 посредством упругого шарнира 4. Возможно и другое выполнение этой связи, например в виде призматической опоры. Между незакрепленным концом пьезоэлемейта 2 и инерционной массой 3 астатического маятника установлен в горизонтальной плоскости плоский упругий элемент 5 выполненный, например, в виде резинового кольца. Положение упругого элемента 5 по вертикали может регулироваться, например фиксированно, путем закрепления его на разной высоте в инерционной массе 3 или плавно при установке его на незакрепленном конце пьезоэлемента 2 путем перемещения вдоль гладких стенок цилиндрического углубления инерционно массы 3 совместно с перемещением по вертикали пьезоэлемента 2
Датчик работает следующим образом.
Под действием измеряемых механических колебаний, например сейсмоколебаний грунта, астатический маятник совершает угловые колебания относительно корпуса. Энергия этих колебаний передается через упругий элемент 5 консольному пьезоэлементу 2 вызывая его деформацию (изгиб и соответственно генерацию электрических зарядов, воспринимаемых электронным усилительным устройством (не показан). Период собственных - колебаний астатического маятника определяется упругостью консольного пьезоэлемента 2, удерживающего маятник в отвесном положении, моментом инерции маятника относительно оси вращения, а также опрокидывамцим моментом силы тяжести. Как показывают расчеты, эти параметры зависят, в основном от двух величин: длины консольного пьезоэлемента 2, расстояния от оси вращения маятника до места установки плоского упругого элемента 5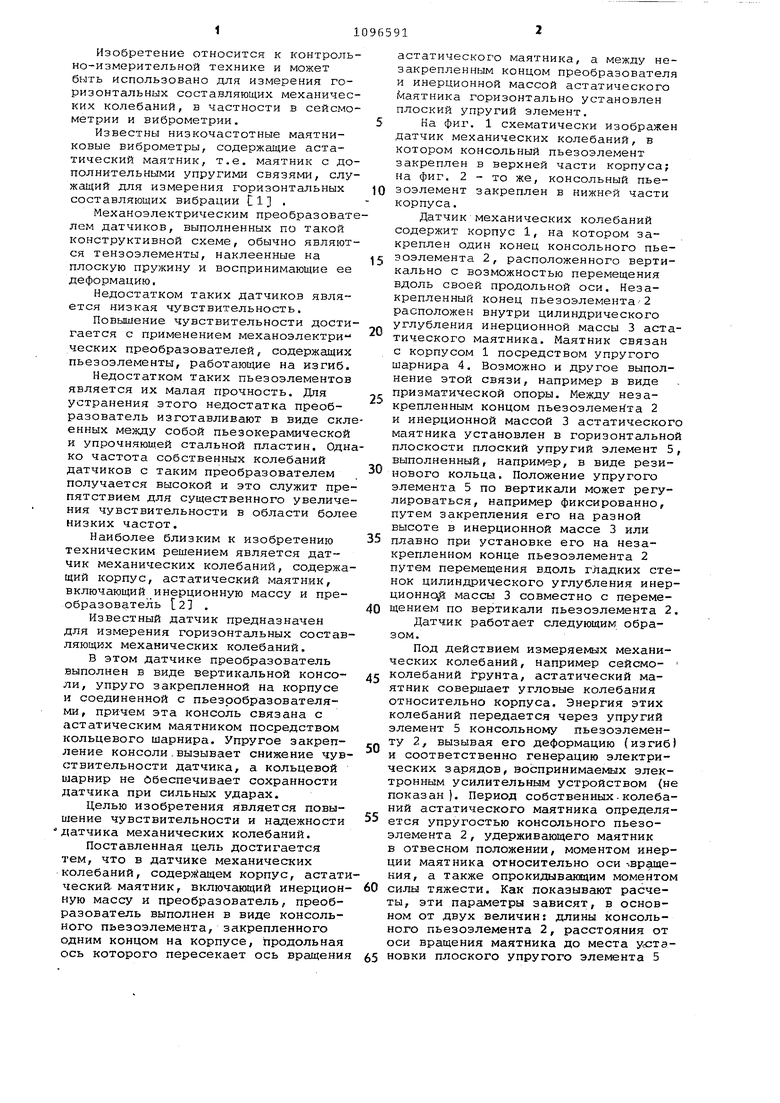

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик механических величин | 2019 |
|
RU2725203C1 |
| Датчик вибрации | 1980 |
|
SU940072A1 |
| Широкополосный резонансный сейсмоакустический приемник | 2016 |
|
RU2660768C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК УСКОРЕНИЯ | 1996 |
|
RU2146373C1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2568963C1 |
| Пьезоэлектрический сейсмоприемник | 1983 |
|
SU1120262A1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВ НАКЛОНА | 1992 |
|
RU2020413C1 |
| ДАТЧИК СОУДАРЕНИЯ | 2003 |
|
RU2248577C1 |
| ПАТЕНТНО-ТЕХН;14ЕГКАЯБИБЛИОТЕКАБ. Г. Смирнов | 1971 |
|
SU302601A1 |
ДАТЧИК МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, содержащий корпус,астатический маятник, включающий инерционную массу и проеобразователь, отличающийся тем, что, с целью повышения чувствительности и надежности, преобразователь выполнен в виде консольного пьезоэлемента, закрепленного одним концом на корпусе, продольная ось которого пересекает ось вращения астатического маятника, а между незакрепленным концом преобразователя и инерционной массой астатического маятника горизонтально установлен плоский упругий элемент.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Низкочастотные маятниковые виброметры | |||
| М., Энергия, 1980, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
