Р1зобретен11е относится к системам автоматического управления и предназначено для автоматического регулирования перемещения подвижного крана исполнительных механизмов.
Известпы следящие устройства для автоматического регулирования перемещения подвижного органа исполнительного механизма, например, регулятора гидравлического тормоза буровой лебедки, содержащие потенциометрический задатчик истинных значений параметров исполнительного механизма, поляризованное реле и потенциометрический датчик текущих значений регулируемых параметров.
Для этих устройств характерна сравнительно низкая точность отработки управляющих воздействий, представляющих собой функцию двух переменных.
Предложенное устройство отличается от известных тем, что в нем установлен подключенный к задатчику истинных значений регулируемых параметров дополнительный задатчик, выполненный в виде линейного потенциометра, движок которого связан с обмоткой поляризованного реле, соединенной с потенциометрическим датчиком текущих значений регулируемых параметров, который подсоединен к источнику питания устройства через переменный резистор.
ботки управляющих воздействий, являющихся функцией двух переменных параметров..
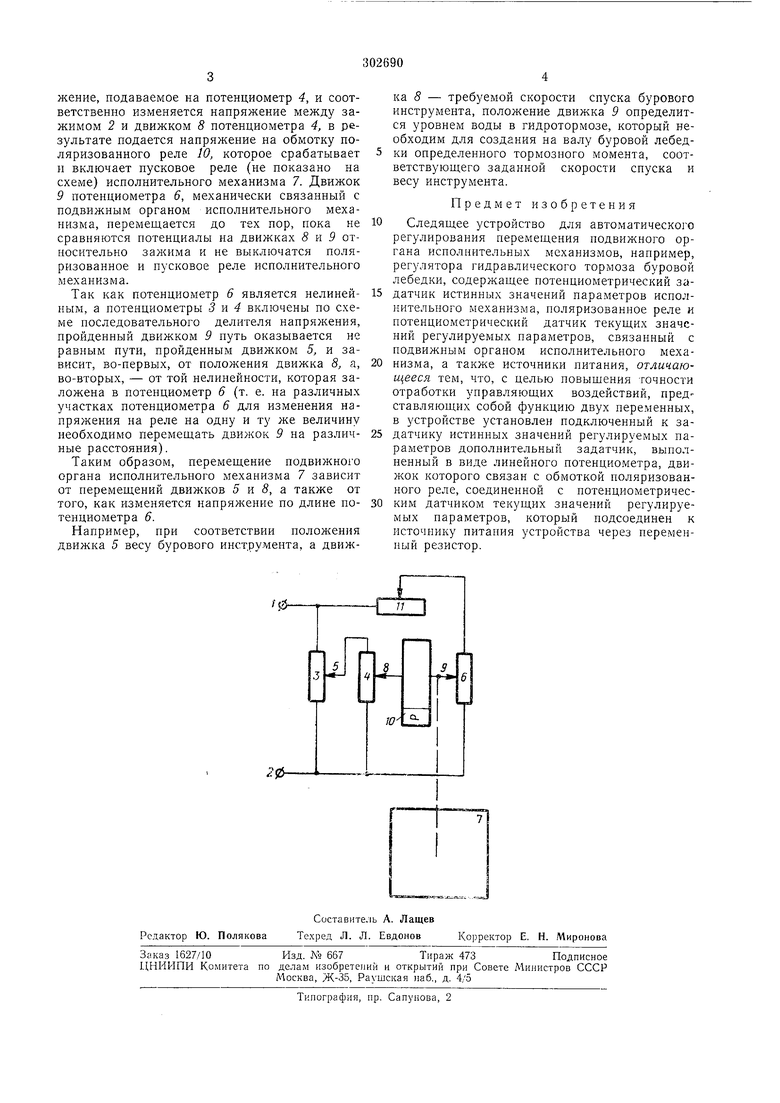
Сущность изобретения поясняется чертежом.
Схема следящего устройства питается постоянным напряжением, нодаваемым на зажимы 1 и 2. Потенциометр 3 является задатчиком истинных значений регулируемых параметров, а дополнительный линейный потенциометр 4 задатчик делителем напрян ения, снимаемого с движка 5 основного задатчпка. Датчик 6 текущих значений регулируемых параметров, выполненный в виде нелинейного нотенциометра, связан с подвижным органом
исполнительного механизма 7. В цепь движков 8, 9 потенцнометров 4 6 включено поляризованное реле 10.
Переменный резистор 11 служит для установки рабочего напряжения на нелинейном
потенциометре 6.
Величина резистора 11, соотнощение величин потенциометров-задатчиков Л и 4 и нелинейность потенциометра-датчика 6 определяются диапазоном рабочих характеристик
регулируемого исполнительного механизма, а также тем, какой закон регулирования должно реализовать данное следящее устройство. Следящее устройство работает следующим образом.
жение, подаваемое на потенциометр 4, и соответственно изменяется напряжение между зажимом 2 и движком 8 потенциометра 4, в результате подается напряжение на обмотку поляризованного реле 10, которое срабатывает и включает пусковое реле (не показано на схеме) исполнительного механизма 7. Движок 9 потенциометра 6, механически связанный с подвижным органом исполнительного механизма, перемещается до тех пор, пока не сравняются потенциалы на движках 8 к 9 относительно зажима и не выключатся поляризованное и пусковое реле исполнительного механизма.
Так как потенциометр 6 является нелинейным, а потенциометры 3 н 4 включены по схеме последовательного делителя напряжения, пройденный движком 9 путь оказывается не равным пути, пройденным движком 5, и зависит, во-первых, от положения движка 8, а, во-вторых, - от той нелинейности, которая заложена в потенциометр 6 (т. е. на различных участках потенциометра 6 для изменения напряжения на реле на одну и ту же величину необходимо перемещать движок 9 на различные расстояния).
Таким образом, перемещение подвижного органа исполнительного механизма 7 зависит от перемещений движков 5 и 8, а также от того, как изменяется нанрял ение по длине потенциометра 6.
Например, при соответствии положения движка 5 весу бурового инструмента, а движка 5 - требуемой скорости спуска бурового инструмента, положение движка 9 определится уровнем воды в гидротормозе, который необходим для создания на валу буровой лебедки определенного тормозного момента, соответствующего заданной скорости спуска и весу инструмента.
Предмет изобретения
Следящее устройство для автоматического регулирования перемещения подвижного органа исполнительных механизмов, например, регулятора гидравлического тормоза буровой лебедки, содержащее потенциометрический задатчик истинных значений параметров исполнительного механизма, поляризованное реле и потенциометрический датчик текущих значений регулируемых параметров, связанный с подвижным органом исполнительного механизма, а также источники питания, отличающееся тем, что, с целью повышения гочности отработки управляющих воздействий, представляющих собой функцию двух переменных, в устройстве установлен подключенный к задатчику истинных значений регулируемых параметров дополнительный задатчик, выполненный в виде линейного потенциометра, движок которого связан с обмоткой поляризованного реле, соединенной с потенциометричесКИМ датчиком текущих значений регулируемых параметров, который подсоединен к источнику питания устройства через переменный резистор.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ РЕГУЛЯТОР С ШИРОТНО- ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1971 |
|
SU453669A1 |
| Следящее устройство | 1936 |
|
SU51312A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАГИСТРАЛЬНЫМ ЭЛЕКТРОВОЗОМ | 1966 |
|
SU187079A1 |
| МНОГОКАНАЛЬНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ | 1966 |
|
SU183286A1 |
| УСТАНОВКА для НАГРУЖЕНИЯ КОНСТРУКЦИЙ ПРИ ИСПЫТАНИИ НА УСТАЛОСТЬ | 1973 |
|
SU388203A1 |
| АВТОМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1934 |
|
SU45663A1 |
| Устройство для дозирования | 1981 |
|
SU987586A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1970 |
|
SU276206A1 |
| Регулятор подачи долота на забой | 1950 |
|
SU100229A1 |
| Устройство для регулирования температуры | 1979 |
|
SU943668A1 |
