Известные устройства для автоматического управления магистральным электровозом, содержап ие блок задания профиля пути, скорости и графика движения, блок, моделирующий движение поезда, служащий для нолучения упрежденных координат, блок отсчета пройденного пути, подключенный к датчикам колесной пары, блок логического выбора режима тяги, блок автоматического торможения и подтормаживания, систему автопуска и систему автоматической локомотивной сигнализации, сложны и не обеспечивают достаточно высокой точности работы.
Упрощение конструкции описываемого устройства для автоматического управления магистральным электровозом и новыщение точности и надежности его работы достигнуто использованием в блоке, моделирующем движение поезда, тяговой многоэлементной микромодели, вынолиенной в виде соединенных между собой микродвигателя, подключенного к датчику напряжения контактной сети, редуктора, гистерезисной муфты, асинхронного двигателя, кругового и тахогенераторных датчиков и приемного генератора следящей системы, подключенной к датчику колесной пары, блоку определения модельного путевого отклонения и программному блоку задания характера профиля пути в функции пути. В качестве счетчика пути использованы круговой и ламельный потенциометр, соединенный с щаговым переключателем, и следящая система, двигатель которой соедипеп с корпусом кругового потенциометра и лентопротял-сным механизмом. Программный блок контроля пути и графика движения выполнен в виде датчика времени, соединенного с логическими ячейками И и ИЛИ и с отводами ламельного потенциометра, а блок автоторможения - в виде двух следящевычислительных систем, подключенных к тахометрическому датчику, потенциометру задания тормозных путей, блоку сравнения, датчику обратной связи, потенциометру фиксации начальной скорости торможения, программному потенциометру и управляющему нуль-органу.
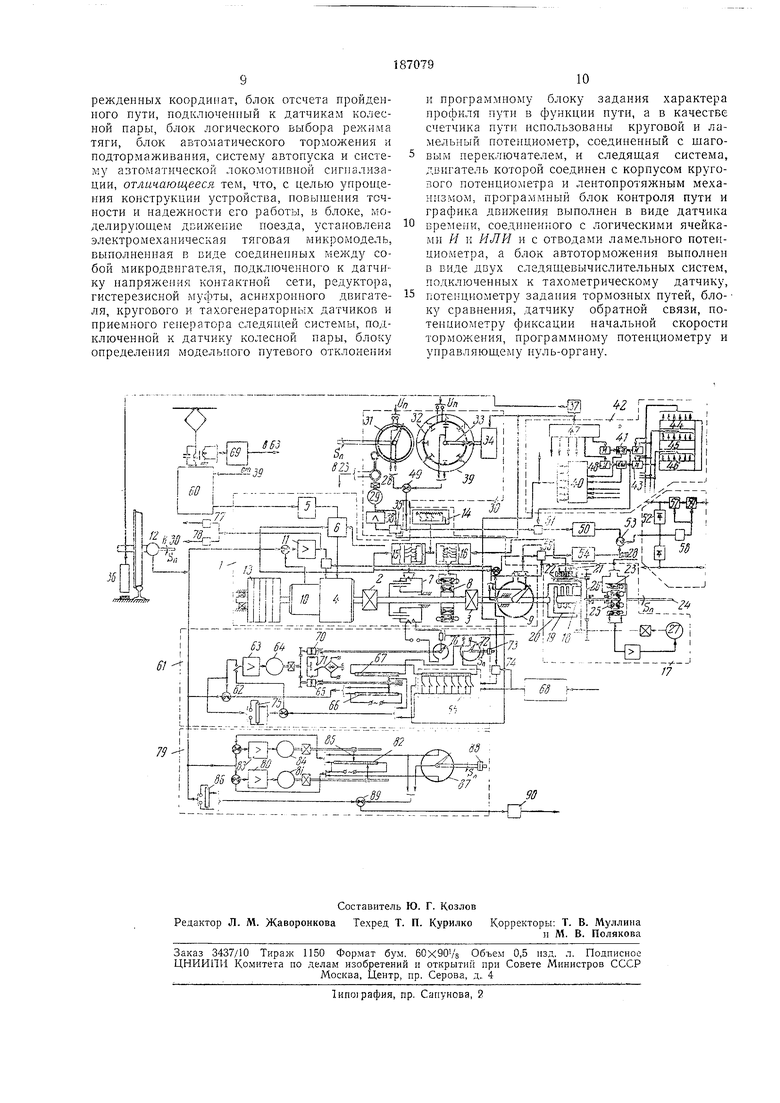
Электрокниематическая схема предлагаемого устройства изображена на чертеже.
В устройстве использована электромеханическая тяговая мнкромодель /, предназначенная для циклического определения путевого отклонения AS, поезда и его скорости в конце упрежденного (впереди лежащего) участка заданной длины. Она состоит из механически соединенных через соответствующие критериям физического подобия редукторов 2 и 5; модельного тягового микродвигателя 4 с обмоткой, питаемой от датчика напряжения контактной сети 5 через блок 6 формирования заданных модельных характеристик тягового
;:.вигателг1; управляемой гистерезиспой муфты 7, используемой в тормозном режиме в качестве бескоитактиого элемента, моделирующего силу осмовыого сопротивления движению в функции веса состава и скорости движения; асинхронного управляемого моментного двигателя 8, моделируюи-,его дополнительную силу сонротнвлення в функции веса и нрофнля пути; кругового датчика 9, фиксирующего начало и конец модельного (упрежденного) путн S.,-; тахоге: ераторного датчика 10, слу кащего в качест; е приемного элемента скоростной следящей системы, состоящей также из усилителя //, микродвигателя 4 и предназначенной для согласования скорости вращения модели со скоростью тахогенераторного датчика колесной пары 12 к моменту начала каждого цикла моделиро зания, а также в качестве датчика скорости модели в процессе моделирования движения поезда на упрежденном учасгке; наборного, и завис 1мостн от веса состава, комплекта маховых дисков 13, посредством которых моделируется инерционная сила.
Для формирования токов управления гистерезисной муфты 7 и асинхронного моментного дг,игатео1я И предусмотрен блок, собранный по схеме каскадного соединения трех секционных потенциометров 14, 15, 16. Потенциометр 14 является общим, он выполняет функции задатчика веса поезда и секционирован в соответствии с возможным округленным значением веса составов; потенциометр 15, в цепь которого в1-;лючепа обмотка гистерезисной муфты 7, секционирован по известной функции изменения силы основного сопротивления от скорости поезда; потенциометр 16 секционирован в соответствии с заданными значеннями элементов профиля пути и является фазореверсивным.
Подключение обмотки управления двигателя 5 к нужной секции этого нотенциометра в функции пройденного пути S осуществляет программный коммутаторный блок 17, выполненный в форме перфолентопротяжного механизма, содержащего в фотоэлектрическом варианте неподвижный источник света 18, рефлектор 19, жестко закрепленный на оси модели непрозрачный стакан 20 с расположеннымн но его окружностям диафрагмирующими щелевыми отверстиями, против которых установлены фотосонротивления 21 таким образом, что при вращении стакана лучи из диафра мирующих отверстий циклически пробегают по кодовым дорожкам перфоленты 22 и управляют в соответствии с кодовыми отверстиями перфоленты подключением нужных фотосопротивлений, коммутируюндих блок задания профиля пути в функции пройденного пути локомотива и упрежденного пути модели. Движение перфоленты, пропорциональное пройденному пути локомотива, достигается за счет передачи через соответствующий масштабный редуктор (не показан) вращения колесной пары с периодической поправкой, вводимой посредством трансформаторной дистанционной передачи, приемный сельсин которой своим статором 23 закренлен на входной оси 24, а ротором 25 на оси лентопротяжной шестерни 26, получающей вращение от двигателя 27 следящей системы, управляемой от сигнальной обмотки приемного сельсина, работающего как в режиме сельсина, так и следящего трансформатора, чем обеспечивается автоматическое суммирование вводимого перемещения с перемещепнем поправки, поступающей от сельсина-датчика 28, соединенного с выходной осью двигателя 29 следящей системы коррекции отсчета пройденного пути, входящей в электромеханический блок 30 отсчета пройденного пути.
Блок 30 состоит из двухотсчетной системы, содержащей круговой потенциометр 31 неп1)ерывного отсчета пути в диапазоне одного контрольного участка. Движок этого потенциометра получает вращение от колесной нары. Второй круговой потенциометр 32 выполнен ламельным соответственно с шагом дискретности, пропорциональным величине одного
контрольного участка. Движок 33 ламельного потенциометра связан с шаговым двигателем 34, осуществляющим его поворот на одну ламель при поступлении импульса от напольного датчика, состоящего из пассивного элемента 35 и расположенного на локомотиве приемного индикатора 36 и блока 37 формирования импульса.
Следящая система коррекции отсчета пути (двигатель 29, усилитель 38) включается на
конце каждого контрольного участка для исключения накопленной погрешности в отсчете. пути по данным от колесной пары за время движения локомотива в нределах одного контрольного участка. В этой системе управляемый двигатель 29 кинематически связан с поворотным каркасом кругового потенциометра непрерывного отсчета пути, что и обеспечивает ввод поправки. Посредством управляемого ключа, не показанного на чертел ;е, в следящую систему коррекции вводится рассогласование, источником которого служит напряжение на круговом потенциометре, если после.а,ний не будет находиться в нулевом состоянии в момент переключения ламельного движка
потенциометра 32 на последующую ламель. Имнульс, отпирающий управляемый ключ, поступает от блока 37, а запирающий импульс поступает при окончании коррекции, что фиксируется нулевым напряжением на выходе
усилителя 38.
Блок 30 электромеханического счетчика пути предназначен также для определения величины путевого отклонения локомотива Д 5., в конце каждого контрольного участка, т. е. определения разницы между фактическим положением локомотива и тем, которое должно быть согласно графику. Для этой цели на круговом ламельном потенциометре 32 имеются отводы с контактами; в нужные моменты вресой шиие 39 посредством соответствующих этим контактам релейных элементов, находящихся в коммутаторном блоке 40, унравляемых от ячеек ИЛИ 41 блока 42 задания графика. Моменты времени, соответствующие графику движения, реализуются посредстзом часового механизма со стрелками, снабженными индуктивными или индукционными датчиками, включенными в схему дешифратора, состоящего из ячеек И 43, подключенных входными зажимами к регистрам часов 44, минут 45, секунд 46 в соответствии с заданным графиком движения. Для фиксации конца текущего контрольного участка (т. е. его норядкового номера) нрименен дещифратор, состоящий из двоичного счетчика 47 и ячеек И 48. В соответствии с графиком движения ячейки И 48 и 43 дешифратора иути и времени соединены с ячейками ИЛИ 41, соединенИ1ЛМИ в свою очередь с релейным элементом блока 40, носредством которого подключается нужный ламельный контакт на щину 39, потенциометр 32, при появлении сигнала от датчика нути или времени. При замыкании каждого контакта ламельного потенциометра с органа сравнения 49 снимается разность напряжений
.-U,,
где /к - напряжение между ламелями;
и,. - нанряжение на круговом потенциометре в момент подключения ламельного контакта.
При поступлении импульса из ячейки ИЛИ 41 в резу«тьтате импульса только от путевой ячейки Я 48 напряжение Д U определит ощибку счетчика, которая компенсируется следящей системой коррекции пути (двигатель 29); при поступлении импульса из ячейки 41 только в результате импульса от временной ячейки И 43 нанряжение Д U определит путевое отклонение локомотива в конце контрольного участка, т. е. в этом случае &S-, K&.U, где К - коэффициент пропорциональности.
Величина Д U передается в блок 50 запоминания нутем открытия ключа 51, при этом г-сличина удерживается в форме напряжения до конца данного контрольного участка. Блок 50 может быть выполнен как в форме запоминающей емкости, так и в форме следящей системы с отслеживанием и заноминанием величины Д S. на потенциометре. Для выбора режима тяги и момента переключения на него служит блок 52, в который с выхода блока 53 сравнения циклически поступает разность путевых отклонений: дS Д5м, 65 онределяется блоком 54, а Д 5j, - путевое отклонение модели за один цикл работы, равное
(У„-У„)Л,
где Vn - программная скорость на упрежденном участке, получаемая в форме напряжения от программного потенциометра 55, выполненного в форме ламельного потенциометра,
секционированного в соответствии с заданными значениями программной скорости V(S) и ее ограничениями, с контактами, подключающими к общей ншне нужную ламель в соответствии с программной командой от блока 57 или перфоленты 22;
Км - текущая скорость модели, нолучае мая в форме напряжения от тахогенераторного датчика W. Моменты времени i и t, соответствующие началу и концу движения модели в пределах упрелсденного участка заданной длины Sy, в 5 форме импульсов поступают от датчика модельного пути так, что импульс ti посредством вентиля 56 открывает, а 2 закрывает поступление в блок 54 функции (V,,-V,,, J. Блок 52 реагирует на знак разности 6 S. 0 При режим тяги lie меняется, при , что регистрирует ячейка блока 52, модель переключается на следующую старую характеристику, что фиксируется также в ячейке 57 памяти.
5 При дальнейщем движении поезда в момент достижения 55 0, что регистрируется нульорганом 58, при работе модели на новой тяге выдается команда на переключение тягового двигателя на новый режим тяги путем отклю0 чения запрета в ячейке 59, пропускающей Б этом положении импульс с ячейки 57 памяти. Если 5 , модель переключается на выбег или более слабую тягу одновременно с аналогичным переключением тягового двига5 теля через блок 60 контроллера.
Для рещения задачи автотормол ения и автоподтормаживания предусмотрена система, состоящая из двух блоков, из которых блок б/ предназначен для решения задачи подторма40 живания и предварительного тормол ения при подходе к станции, а другой, включаемый от путевого датчика, фиксирующего начало второго тормозного пути до полной остановки поезда, производит торможение до полной 45 остановки в заданной точке.
Блок 61 выполнен в виде двух последовательно действуюп1их систем. Одна из них - следящая система - состоит из органа сравнения 62, усилителя 63, двигателя 64, веду50 щего слежение через муфту 55 за текущей скоростью УО локомотива на потенциометре 66 и дублирующем потенциометре 67, что производится непрерывно до начала торможения или нодтормаживания. Начало торможения 55 при подходе к станции фиксируется первым напольным датчиком (не показан). При подтормаживании или торможении, обусловленных временными или постоянными ограничениями скорости, начало тормозного пути фик60 сируется программными устройствами с помощью блока 40, если оно совпадает с концом контрольного участка или перфоленты 22. При ограничении скорости сигналами автоблокировки начало торможения или подтормажива65 ния фиксируется от приемных локомотивных
устройств сигналов автоблокировки (блок 68} или сигналов телеуправления (блок 69), исходящих от диспетчерского пункта. При поступлении сигнала на торможение или подтормал иванпе происходит переключение муфт с 65 на 70 контактом 71, чем достигается запоминание начальной скорости Vg тормол ения. Далее торможение происходит в соответствии с законом снижения скорости, пропорциональным пройденному тормозному пути, который фиксируется датчиком 72, приводимым в действие посредством электромагнитной муфты 73. При этом движение поезда приближенно будет соответствовать следующему уравнению:
(V-V,)S, (V,V,)S,
где V - текущ,ая скорость локомотива на тормозном участке, получаемая от тахогенераторного датчика колесной пары /2;
Vs - конечная скорость, задаваемая программным потенциометром 55; 5к - фиксированная длина тормозного участка, задаваемая потенциометром, с фиксированным отводом 75, пропорциональным 5.
При поступлении команды на подключер1ие нужной скорости от блока 68 одновременно подается запрет через элемент 74 на поступление команд в потенциометр 55 от блока 40 или перфоленты 22.
Реализация торможения по указанному соотнощению производится посредством следящей системы сравнения левой и правой части уравнения так, что правая часть формируется каскадным соединением потенциометрического датчика 72 и последовательным и встречным соединением дублирующего потенциометра 67 запоминания и программного потенциометра 55. Аналогично левая часть формируется каскадным соединением органа сравнения 62 и потенциометрического датчика тормозного участка S, конец которого соответствует конечной скорости Vg. Воздействие на тормозную систему производится с выхода усилителя //, выдающего сигнал рассогласования скорости поезда и модели, которая тормозится под воздействием тормозного тока в тормозной обмотке гистерезисной муфты. Величина тока устанавливается движком 76 переменного сопротивления, связанного с выходным валом управляемого двигателя 64, в результате чего скорость вращения вала модели будет уменьщаться согласно указанному выше закону. В цепи передачи сигналов управления в тормозную систему включены максимальное реле 77 на выбег при достижении положительного рассогласования скоростей поезда и модели более допустимого и реле 78 включения тормозной системы при отрицательном рассогласовании более допустимого, при этом давление в тормозных цилиндрах устанавливается пропорциональным рассогласованию.
во времени системы, из которых первая (усиитель 80, двигатель 5/) предназначена для апоминания на следящем потенциометре 82 начальной скорости второго этапа торможения, начало которого фиксируется сигналом от второго напольного тормозного датчика и этим же сигналом останавливается первая следящая система, обеспечивая контактом потенциометра 82 запоминание начальной скорости второго этапа. Вторая следящая система (усилитель 83, двигатель 84) продолжает слежение за текущей скоростью на том же потенциометре 82 носредством второго движка 85. В результате этого слежения на заданном
интервале действия тормозной системы А S, конец которого фиксируется остановкой следящей системы с контактом движка 85, система выдает снижение скорости А VT в диапазоне А 5т в форме электрического напряжения VT
между движками потенциометра 82.
Импульсом от второго напольного датчика (не показан) дается команда на включение заранее заданной тормозной позиции, которая выдерживается на заданном отрезке пути
А 5т. После прохождения этого отрезка тормозного пути действие тормозов прекращается, при этом поезд переходит на выбег. Повторное включение той же тормозной позиции происходит при достижении равенства
AVi- S V-ASrJ
AFi I/iT-V2T,
где - начальная скорость второго тормозного участка;
Узт - конечная скорость, соответствующая концу фиксированного участка А 5т, получаемого в форме напряжения от задатчика 86; А 5 - путь, оставщийся до полной остановки поезда, получаемый от
датчика 87, подключаемого электромагнитной муфтой 88; V - текущая скорость локомотива, получаемая от тахогенераторного датчика 10.
Это соотнощение регистрируется вычислительным устройством, в котором левая часть уравнения формируется каскадным соединением датчика 87 с зажимами движков потенциометра 82, а правая - каскадным соединением тахогенератора колесной пары 12 с задатчиком 86 длины участка А ST. Посредством элемента сравнения 89 и нуль-органа 90 производится выдача импульса повторного включения тормозной системы па ту же позицию. Это повторное включение доводит поезд до полной остановки в заданной точке.
Предмет изобретения
Устройство для автоматического управления магистральным электровозом, содержащее блок задания профиля пути, скорости и графика движения, блок, моделируюащй движение поезда, служащий для получения уп
режденных координат, блок отсчета пройденного пути, подключенный к датчикам колесной пары, блок логического выбора режима тяги, блок автоматического торможения и подтормаживания, систему автопуска и систему автоматической локомотивной сигнализации, отличающееся тем, что, с целью упрощения конструкции устройства, повышения точности и надежности его работы, в блоке, моделирующем движение поезда, установлена электромеханическая тяговая микромодель, выполненная в виде соединенных между собой микродвигателя, подключенного к датчику напряжения контактной сети, редуктора, гистерезисной муфты, асинхронного двигателя, кругового и тахогенераторных датчиков и приемного генератора следящей системы, подключенной к датчику колесной пары, блоку определения модельного путевого отклонения
10
и программному блоку задания характера нрофиля пути в функции пути, а в качестве счетчика пути использованы круговой и ламельный потенциометр, соединенный с шаговым переключателем, и следящая система, двигатель которой соединен с корпусом кругового потенциометра и лентопротяжным механизмом, программный блок контроля пути и графика движения выполнен в виде датчика времени, соединенного с логическими ячейками Я и ИЛИ и с отводами ламельного потенциометра, а блок автоторможения выполнен в виде двух следящевычислительпых систем, подключенных к тахометрическому датчику,
потенциометру задания тормозных путей, бло- ку сравнения, датчику обратной связи, потенциометру фиксации начальной скорости торможения, программному потенциометру и унравляющему нуль-органу.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 1968 |
|
SU207966A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2005 |
|
RU2283786C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2009 |
|
RU2422314C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| Система для интервального регулирования движения поездов | 2022 |
|
RU2791776C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ | 2010 |
|
RU2422315C1 |
| Система для интервального регулирования движения поездов | 2022 |
|
RU2791777C1 |
| Система автоматизированного регулирования скорости локомотива в зоне сближения с неохраняемыми и необслуживаемыми переездами | 2018 |
|
RU2696046C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ У ПУТЕВЫХ УПОРОВ ПРИ ДВИЖЕНИИ НА ТУПИКОВЫХ ПУТЯХ СТАНЦИИ | 2013 |
|
RU2529561C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
c -f bp -- n//r -JJ: 7 - Tv / У ЗТ I1-- ЦЕ&Ш7;з U -ni-ii™miN-i, ,Ly Ь КЦй 7г гЯ Л}}-}-}-Y}-У
