Известно устройство непрерывного действия для управлеяия скоростью кольцепрядильной машины, в KOTQpOM сигнал с носителя программы при помощи датчиков преобразуется, усиливается и поступает в исполнительный орган. Устройство содержит поворотный датчик базисного регулирования, лолучающий сигнал от кулачка через рычаг, и поворотный датчик ПОСЛОЙНОГО регулирования. Оно имеет механическую связь с кольцевой планкой и раскладывает ее движение на возвратно-колебательное, соответствующее наработке слоев и прослоек, и поступательное смещение при переходе от одного слоя к другому. Первое движение через фрикционный элемент передается послойному датчику, а второе через базисный эксцентрик - базисному датчику. Движение кольцевой планки является результатом суммирования и формирования мотальным механизмом прядильной мащ.ины более простых движений, а известное лрограм-мное устройство рещает обратную задачу и поэтому конструктивно выполнено сложно, что влияет на точность регулирования скорости машины.
Кроме того, опережение послойным сигналом движения кольцевой планки, необходимое для синхронизации послойных изменений скорости с перемещением планки, требует также усложнения конструкции.
выщение точности регулирования скорости машины. Для этого вращающиеся кулачки для формирования базисного и послойного сигналов взаимодействуют с мотальным механизмом. На валу датчика укреплен подпружиненный рычаг, свободный конец которого скользит по поверхности кулачка. Кро.ме того, для .компенсации инерпнонности прядильной мащины сигнал опережения, вырабатываемый с послойиого датчика с помощью послойного кулачка, пропорционален углу разводки экстремумов (ПОСЛОЙНОГО и мотального кулачков.
Для постепенного нарастания амплитуды ПОСЛОЙНЫХ колебаний в процессе наработки
гнезда початка первичная обмотка послойного датчика подключена к выходным за1жимам базисного датчика, напряжение на которых в начале .наработки съема равно нулю.
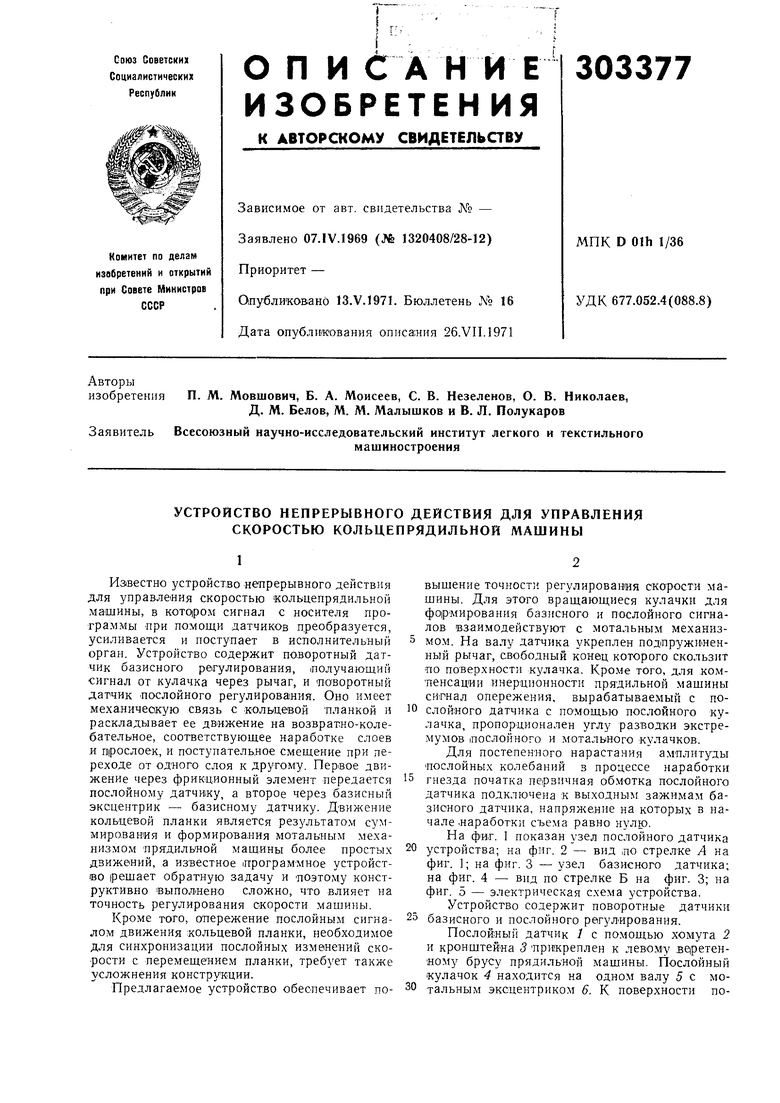
На фиг. показан узел послойного датчика
устройства; на фиг. 2 - вид по стрелке А на
фиг. ; на фиг. 3 - узел базисного датчика;
на фиг. 4 - вид по стрелке Б на фиг. 3; на
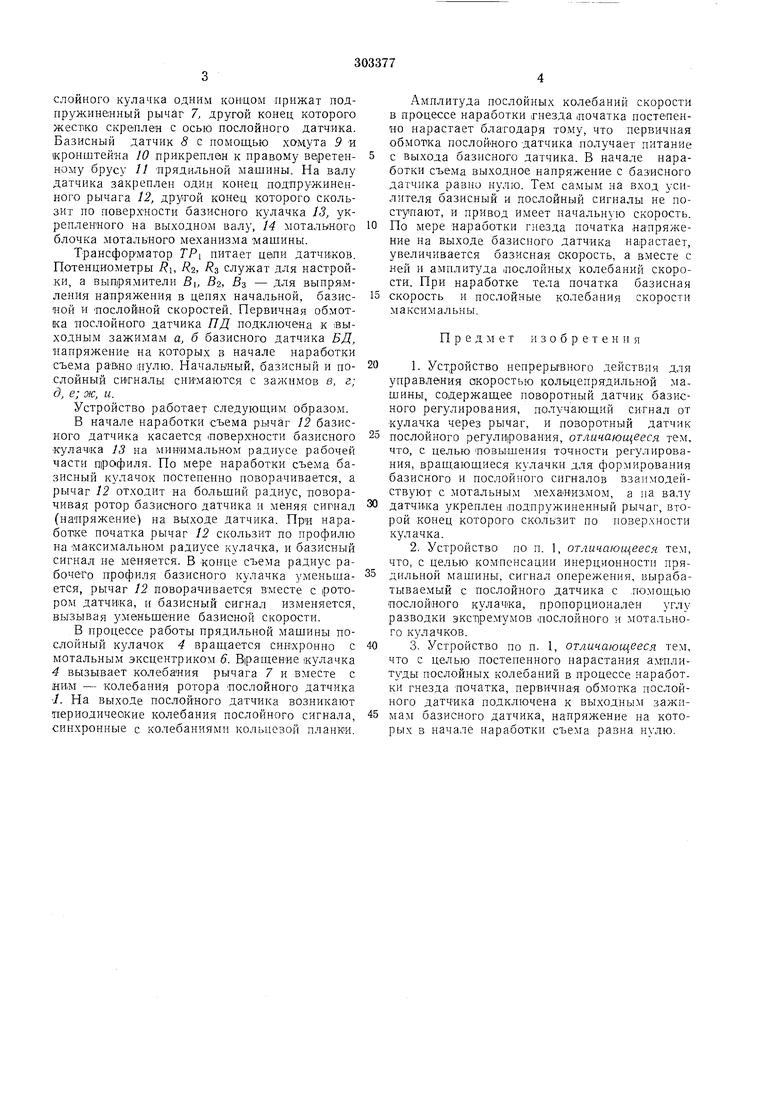
фиг. 5 - электрическая схема устройства.
Устройство содержит поворотные датчики
базисного и послойного регулирования.
Послойиый датчик / с помощью хомута 2 и кронштейна 3 прикреплен к левому ве|ретенному брусу прядильной машины. Послойный кулачок 4 находится на одном валу 5 с мотальным эксцентриком 6. К поверхности послойного кулачка одним концом прижат подпрул :иненный рычаг 7, другой конец которого жест1ко скреплен с осью послойного датчика. Базисный датчик 8 с помощью хомута 9 и кронштейна 10 прикреплен к правому ве(ретенному брусу 11 прядильной машины. На валу датчика закреплен один конец подпружиненного рычага 12, другой конец которого скользит по поверхности базисного кулачка 13, укрепленного на выходном валу, l4 мотального блочка мотального механизма машины.
Трансформатор ТР питает цепи датчиков. ПотенциоАГетры Ri, Rz, Кз служат для настройки, а выпрямители В, В, Вз - для выпрямления напряжения в цепях начальной, базисной и ПОСЛОЙНОЙ скоростей. Первичная обмотка послойного датчика ПД подключена к выходным зажимам а, б базисного датчика БД, напряжение на которых в начале наработки съема равно нулю. Начальный, базисный и послойный сигналы снимаются с зажимов в, г; д, е; ж, и.
Устройство работает следуюш,им образом.
В начале наработки съема рычаг 12 базисного датчика касается ловерхности базисного кулачка 3 на минимальном радиусе рабочей части п|рО|филя. По мере наработки съема базисный кулачок постепенно поворачивается, а рычаг 12 отходит на больший радиус, поворачивая ротор базисного датчика и меняя сигнал (напряжение) на выходе датчика. При наработке початка рычаг 12 скользит по профилю на максимальном радиусе кулачка, и базисный сигнал не меняется. В конце съема радиус рабочего профиля базисного кулачка уменьшается, рычаг 12 поворачивается вместе с ротором датчика, и базисный сигнал изменяется, вызывая уменьшение базисной скорости.
В процессе работы прядильной машины послойный кулачок 4 врашается синхронно с мотальным эксцентриком 6. В|рашен«е кулачка 4 вызывает колебания рычага 7 и вместе с ним - колебания ротора послойного датчика 1. На выходе послойного датчика возникают периодические колебания послойного сигнала, синхронные с колебаниями кольцевой планки.
Амплитуда послойных колебаний скорости в процессе наработки гнезда початка постепенно нарастает благодаря тому, что первичная обморка послойного датчика получает питание
с выхода базисного датчика. В начале наработки съема выходное напряжение с базисного датчика равно нулю. Тем самым на вход усилителя базисный и послойный сигналы не поступают, и привод имеет начальную скорость. По мере наработки гнезда початка напряжение на выходе базисного датчика нарастает, увеличивается базисная скорость, а вместе с ней и амплитуда послойных колебаний скорости. При наработке тела початка базисная
скорость и послойные колебания скорости максимальны.
Предмет изобретения
1. Устройство непрерывного действия для управления скоростью колвцепрядильной машины, содержашее поворотный датчик базисного регулирования, получаюший сигнал от кулачка через рычаг, и поворотный датчик
послойного регулирования, отличающееся тем, что, с целью повышения точности регулирования, врашающиеся кулачки для формирования базисного и послойного сигналов взаимодействуют с мотальным механизмом, а на валу
датчика укреплен подпружиненный рычаг, второй конец которого скользит по поверхности кулачка.
2. Устройство по п. 1, отличающееся тем, что, с целью компенсации инерционности прядильной машины, сигнал опережения, вырабатываемый с послойного датчика с помощью послойного кулач1ка, пропорционален углу разводки экст|ремумов послойного и мотального кулачков.
3. Устройство по п. 1, отличающееся тем, что с целью постепенного нарастания амплитуды послойных колебаний в процессе наработ.. ки гнезда початка, первичная обмотка послойного датчика подключена к выходным зажимам базисного датчика, напряжение на которых в начале наработки съема равна нулю.