Известны имитаторы аэродинамических нагрузок, в которых используется цилиндр с гидроаккумулятором и баллоном сжатого воздуха.
Изменение вида нагрузочной характеристики производится путем изменения радиуса кривошипа и изменением точки крепления цилиндра. Такое выполнение устройства неудобно в эксплуатации, а также не позволяет производить изменения нагрузочной характеристики-во время его работы.
С целью уменьшения, влияния инертности рабочего тела, расширения класса воспроизводимых нагрузочных характеристик и изменения их в процессе работы в предлагаемом устройстве в основании выполнены криволинейные пазы для установки под различными углами к поводку качалки нагрузочного нпевматического цилиндра и установлено управляемое электрическим сигналом струйное реле, включенное между нагрузочным цилиндром п источником пневмопитания.
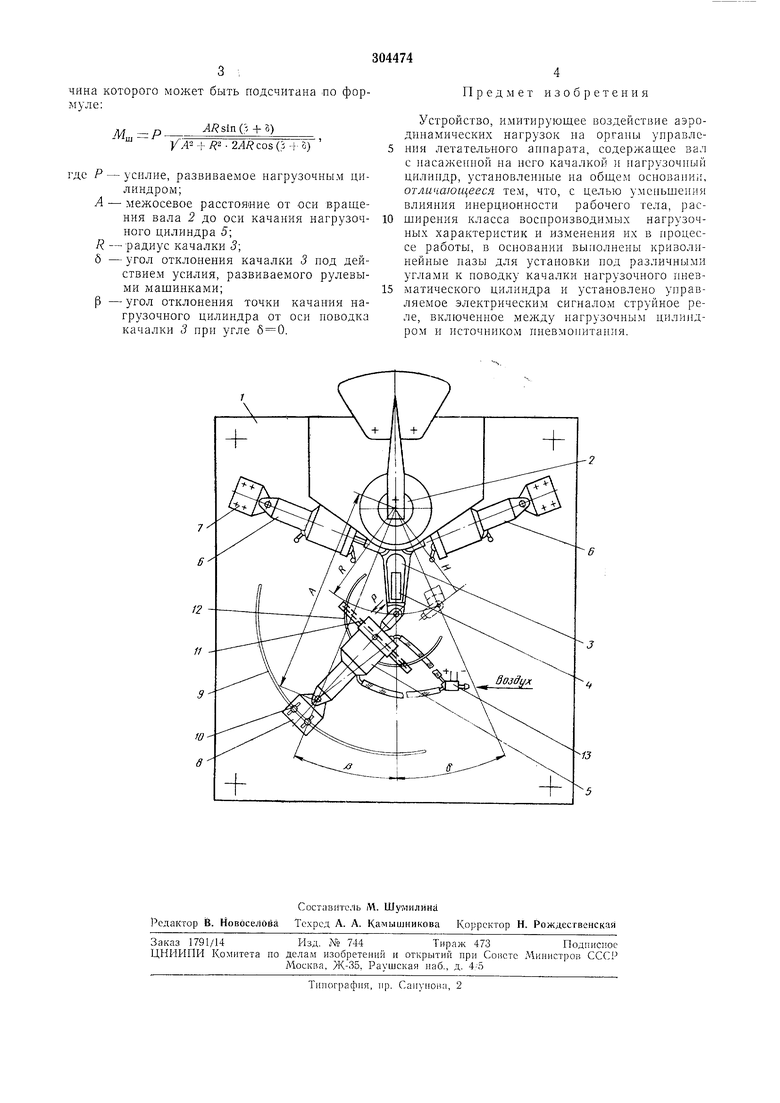
Па чертеже изображена принципиальная схема устройства.
На жестком основании / в подшипниках установлен вал 2, на который насажена качалка 3 со сменным грузом 4, имитируюшим момент инерции управляюшего органа летательного аппарата. Качалка шарнирно соединена с
иневматическим нагрузочным цилиндром 5 и рулевыми машппкамп исследуемого привода о так, что кпнематические соотиошения устройства соответствуют кинематическим соотношениям исследуемого привода. Другие точки крепления рулевых машинок и нагрузочного цилиндра шарнирно подсоединены к кронштейнам / и 8, установленным на основании. Кронштейн 8 может перемешаться в криволинейном пазу 9 и закрепляться при помош,и барашков 10. Кроме этого, нагрузочный цилиндр может быть закреплен при помоши хомута 11 в криволипейном пазу 12, что дает возмол иость расширить диапазон воспроизводимых
нагрузочных характеристик.
Давленне воздуха в полостях нагрузочного цилиндра регулируется струйным реле 13, на уцравляюшую обмотку которого подается
электрический с моделирующей установки. Благодаря этому обеспечивается возможиость 1 змепения вида нагрузочной характеристики в процессе работы устройства. Под действпем усплия, развиваемого рулевыми машинками, связанными с системой управления летательного анпарата, качалка 3 отклоняется на угол б. При подаче рабочего давлеиия от стационарной пневмосистемы в полости нагрузочного цилиндра 5 последний
чина которого может быть подсчитана по формуле:
AR&inQ. + 5)
М,„ РУЛ2-Ь/ 2 (3 -43)
е Р - усилие, развиваемое иагрузочным цилиндром;
А - межосевое расстояние от оси вращения вала 2 до оси качания нагрузочного цилиндра 5;
R - радиус качалки 3;
б - угол отклонения качалки 3 под действием усилия, развиваемого рулевыми машинками;
р - угол отклонения точки качания нагрузочного цилиндра от оси поводка качалки 3 при угле 6 0.
Предмет изобретения
Устройство, имитирующее воздействие аэродинамических нагрузок иа органы управления летательного аппарата, содержащее вал с пасаженпой на него качалкой и нагрузочный цилиндр, установленные на общем основапи):, отличающееся тем, что, с целью уменьщепия влияния иперциоиности рабочего тела, расщирения класса воспроизводимых нагрузочных характеристик и изменения их в процессе работы, в основании выполнены криволинейные пазы для установки под различными углами к поводку качалки нагрузочного пневматического цилиндра и установлено управляемое электрическим сигналом струйное реле, включенное между нагрузочным цилипдром и источником пневмопитания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированная динамически-подобная аэродинамическая модель для разных видов аэродинамических испытаний | 2023 |
|
RU2808290C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ЛЮКА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2444715C1 |
| ХВОСТОВОЙ ОТСЕК ВОЗДУШНО-ДИНАМИЧЕСКИХ РУЛЕВЫХ ПРИВОДОВ ДЛЯ УПРАВЛЯЕМЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ПРЕИМУЩЕСТВЕННО ДЛЯ УПРАВЛЯЕМЫХ АВИАЦИОННЫХ БОМБ) И ПНЕВМОДВИГАТЕЛЬ РУЛЕВОГО ПРИВОДА | 2009 |
|
RU2418261C2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ РУЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2783794C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЭЛЕВОНОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2785389C1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1993 |
|
RU2072311C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| Крупноразмерная аэродинамическая модель | 2015 |
|
RU2607675C1 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| Вертолет с реактивным приводом несущего винта | 2018 |
|
RU2706746C1 |
