Изобретение относится к области автоматического регулирования и может быть применено для управления инерционными объектами, например, электроприводами, калориферами, котельными и другими тепловыми агрегатами.
Предлагаемый регулятор, кроме логических элементов «НЕ, «ИЛИ и формирователей длительности импульсов, содержит блок квантования входного сигнала, первый выход которого непосредственно, а остальные через формирователи длительности импульсов связаны с элементом «ИЛИ, соединенным с выходом «Меньше регулятора, при этом последний выход блока квантования через элемент «НЕ, а остальные через элемент «НЕ и формирователь длительности импульсов связаны со вторым элементом «ИЛИ, выход которого подключен к выходу «Больше регулятора. Цель изобретения - улучшить качество регулирования, т. е. повысить быстродействие и статическую точность регулирования медлеЕ но протекаюш,их нроцессов, а также уменьшить величину перерегулирования.
Это достигается совмещением трехнозиционного способа регулирования по отклонению при непрерывном управляющем воздействии ло первому каналу и импульсного регулирова.чия по знаку производной и отклонению по второму каналу. Для этого зона нечувствительности трехпозиционного регулирования квантуется иа заданное число уровней. Каждый переход сигналом датчика квантованного уровня фиксируется одиночным импульсом заданной длительности и полярности на выходе регулятора. Полярность такого импульсного воздействия определяется знаком производной, частота следования импульсов - абсолютной величиной производной, а длительность импульса - абсолютным значением отклонения регулируелюй величины от задания. Заданное значение регулируемой величины выставляется в центре зоиы нечувствительности трехпозиционного регулирования.
На фнг. 1 представлен пример системы регулирования температуры инерционного объекта, в которой применен данный регулятор. Приняты следующие обозначения: ОР - объект регулирования; H(t) - возмущающие воздействия; Д - датчик температуры; АР- автоматический регулятор; ИМ - исполнительный механизм; РО - регулирующий орган.
На фиг. 2 приведена схема регулятора, содержащего блок 1 квантования по уровням, логические схемы «НЕ 2, две схемы «ИЛИ 3, 4, а также формирователи 5 длительности импульсов, калсдый из которых состоит из логической схемы «Занрет 6 и линии задержки 7.
Составитель 3. В. Маркова
Редактор Ю. Полякова Техред Е. Борисова
Корректор О. С. Зайцева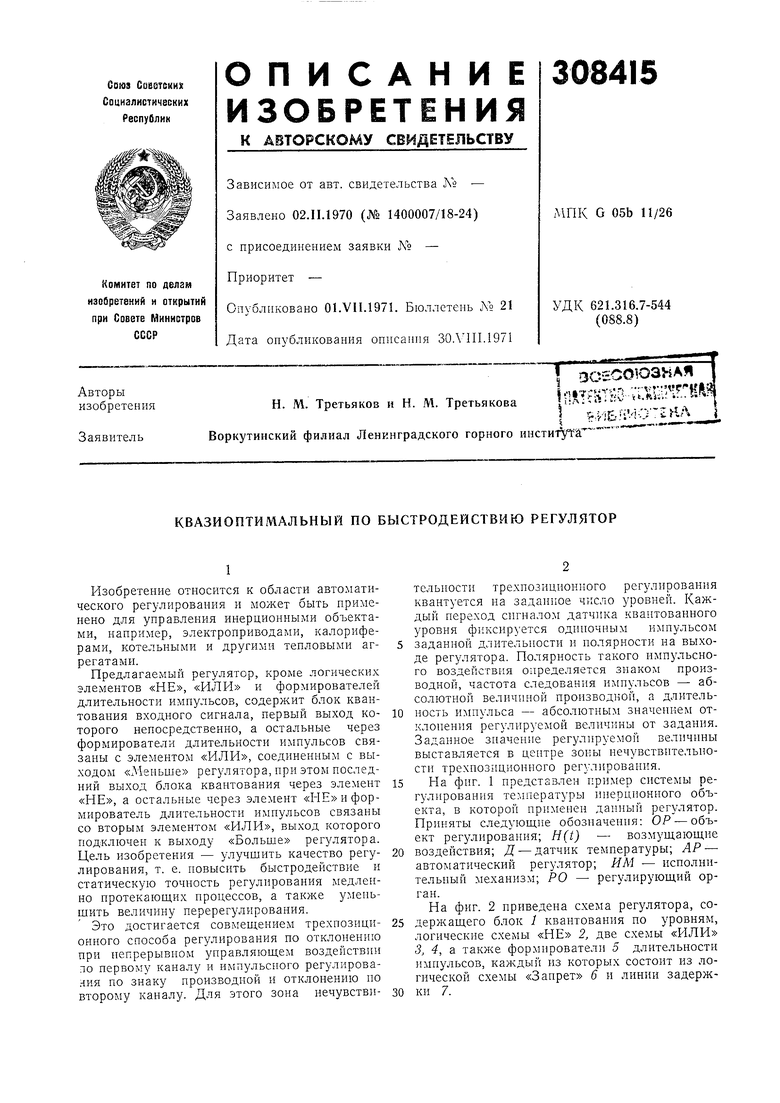
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ РЕГУЛЯТОР ИНЕРЦИОННЫХ ОБЪЕКТОВ | 1970 |
|
SU277906A1 |
| РЕГУЛЯТОР ДЛЯ ИНЕРЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU370584A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 1971 |
|
SU310258A1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗНА'КА ПРОИЗВОДНОЙ МЕДЛЕННО МЕНЯЮЩИХСЯ СИГНАЛОВ | 1970 |
|
SU276539A1 |
| Регулятор для инерционных объектов | 1973 |
|
SU446026A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЕДЕЛЬНОЙ ВЕЛИЧИНЫ ПРОИЗВОДНОЙ МЕДЛЕННО ИЗМЕНЯЮЩИХСЯ СИГНАЛОВ | 1972 |
|
SU351196A1 |
| ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU364950A1 |
| ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 1972 |
|
SU348996A1 |

