1
Изобретение относится к области автоматического регулирования и может быть применено для управления инерциоиными объектами, например тепловыми, электрическими приводами и пр.
Известны бесконтактные регуляторы икерцианиых объектов, содержащие формирователь ошибки, соедияеняый с первым входом сумматора, дифференциатор, вход которого подключен к выходу формирователя ошибки и ко второму входу сумматора, двухпозиционный релейный элемент, импульсное звено, пороговый элемент и соединенный с выходом сумматора трехпозиционный релейный элемент, выход которого связан с первым входом запирающего вентиля и первым входом выходной схемы, выход которой через исполнительный механизм связан с объектом регулирования, соединенным с фор|МИрователем ошибки.
Однако качество регулирования, обеспечиваемое этими регуляторами, несколько снижено по следующим причинам. Так, известный регулятор при разгоне системы осуществляет импульсное управление на границе зоны нечувствительности Т рехпозиционного элемента, управляющее воздействие становится нецрерывным. Тем самым затягивается время регулирования и увеличивается величина перерегулирования. При этом имнульсное управление регулятор осуществляет только по з;наку производной, не учитывая в этот период абсолютной величины производной. В связи с этим в зоне импульсного управляющего воздействия возможны кваз иустойчивые и даже неустойчивые состояния системы.
Предлагаемый регулятор отличается от известных тем, что он содержит второй запирающий вентиль, соединеН|Ный с выходол импульсного звена, и схему совпадения, первый вход которой через двухпозиционный релейный элемент подключен к выходу первого запирающего вентиля, а второй вход - к выходу порогового элемента, связанного с выходом формирователя ощибки. Выход схемы совпадения соединен со вторым входом выходной схемы и с запрещающим входом второго запирающего вентиля, выход которого подключен к третьему входу выходной схемы, при этом второй вход первого запирающего вентиля связан с дифференциатором, а выход - со входом импульсного звена. Такое выполнение позволяет улучшить качество регулирования.
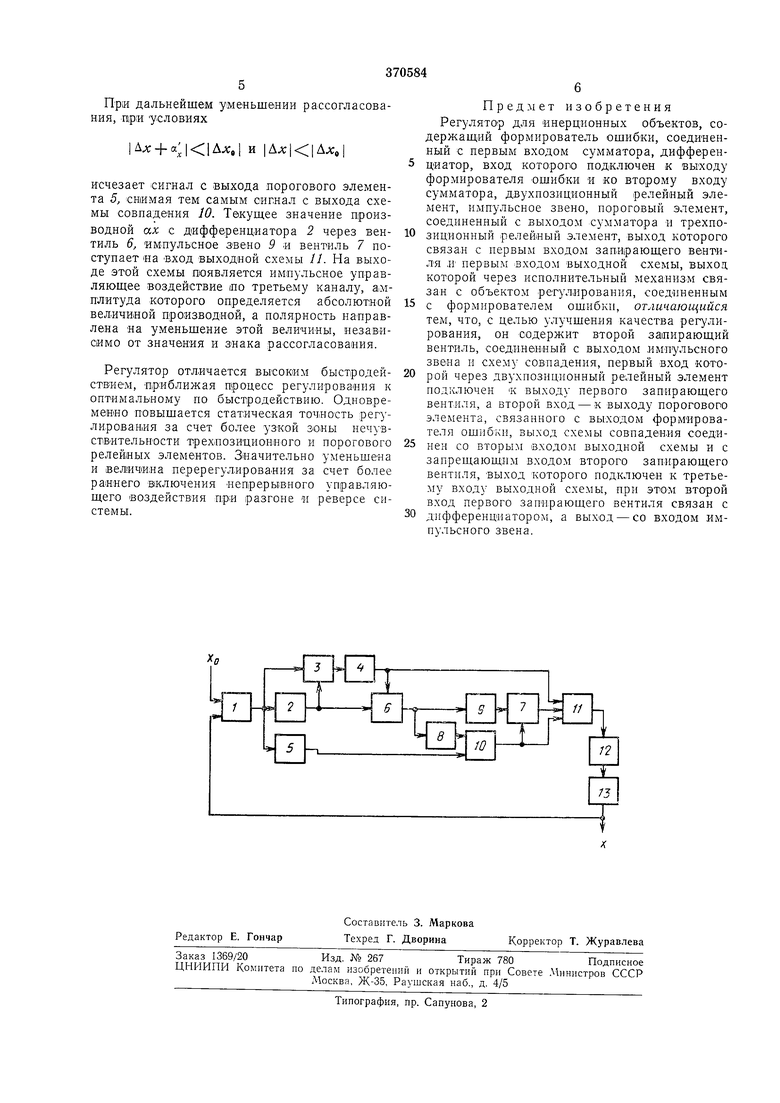
На чертеже представлена функциональная схема предлагаемого регулятора. Регулятор состоит из формирователя ощибки /, дифференциатора 2, сумматора 3, трехпозицчюнного релейного элемента 4, порогового элемента 5,
запирающих вентилей 6 и 7, двухпоза ционного релейного элемента 8, импульсного, звена 9, схемы совпадения 10, выходной С:хе.мы 11, исполнительного механизма « регулирующего органа 12, 13 - объект,регулирования. Выход формирователя ошибки 1 соединен 00 входами сумматора 3, дифференциатора 2 и поро гового элемента 5. Выход дифференциатора 2 связан с сумматором 3 и прямым входом замирающего вентиля 6, запрещающий вход которого соединен через трехпозиционный элемент 4 с выходом сумматора. Выход запрещающего вентиля соединен с импульсным звеном 9, а также через двухиозиционный элемент 8 - со входом схемы совпадения 10, на второй вход которой подан выход порогового элемента 5. Выходы трехпозиционного элемента 4, схем совпадения 10, а также запирающего вентиля 7, прямой вход которого соединен с им-пульсным звеном 9, а запрещающий - со схемой совпадения 10 поданы на вход выходной схемы //. Выход последней соединен с исполнительным, механизмом 12, связанным с объектом регулирования 13. В данном регуляторе сочетаются три канала. В первом включен трехиозиционный релейный элемент 4, реагирующий на отклонение непрерывным управляющим воздействием. Воздействие по первому каналу осуществляется при условии: |Д- + . . где Дл; - величина отклонения сигнала задания; Ахо - половина зоны нечувствительности трехпозиционного релейного элемен.та; , . . :. а - коэффициент.усилия. ,. ; Область действия второго и .третьего каналов заключена Б: зоне .нечувствительности трехпозиционного элемента, величина которой равна х ± (Ал;, - а;). Во втором канале включены пороговый элемент 5 с характеристикой у Р«|Д 1 о при I Дл; к I Адго а также двухпозиционный релейный элемент 8 с характеристикой + 1 при О при а - О у„ Ф,{х} - 1 при а которые совместно со схемой совпадения 10 образуют релейный элемент,.реагирующий на отклонение также непрерывным управляющим воздействием, амплитуда которого определяется величиной (л:), а полярность- знаком нроизводной, т. е. ) + Д при j АА; I Алгои я О О при I Ал: 1 AJCeи я; S о - 1 при I Ал 5:1 АЛо Iи я О Воздействие по второму каналу осуществляется при условиях I Ал + а; К Дл: Ал:, Третий канал, содержащий им:пульсное звено, реагирует на производную регулируемой величины импульсным управляющим воздействием. При- этом полярность и амплитуда .импульсов определяется соответственно знаком и абсолютной величиной производной, а длительность импульсов и частота их следования постоянны. Таким образом, воздействие по третьему каналу осуществляется при условиях I Ал: + а 1 I Ал:о | и Ал| | Ал:о| . Работа регулятора происходит следующим образом. Текущее значение регулируемого параметра х подается с выхода объекта регулирования /5 на вход формирователя ошибки /, где сравнивается с заданным значением XQ. Текущее значение отклонения поступает на дифференциатор 2, сумматор 5 и пороговый элемент 5. Значение производной отклонения, взятое с коэффициентом а с дифференци-атора 2 подается на вход запирающего вентиля 6 и на сум матор 3, где суммируется с величиной отклонения Ал:. Величина Ax+tx поступает на вход трехпозиционного релейного элемента 4. Если I Ах+сСд. I |АА:О|, то на выходе последнего поя/вляется сигнал соответствующей иолярности, который поступает на запирающий вход ве нтиля 6, п)репятствуя прохождению сипнала ах и одновременно поступает на вход выходной схемы 11, осуществляя по первому каналу непрерывное управляющее воздействие, полярность которого направлена на уменьщение рассогласования, независимо от величины и знака производной. По мере уменьшения рассогласования, при условиях |Ал + а;1 |Ал:о| и |Ал |Дл:. исчезает сигнал на выходе трехпозициэнного элемента 4. отк1рывая вентиль 6 и сигнал с дифференциатора 2 вентиль 6 и двухпозиционный элемент 8 поступает на первый вход схемы совпадения 10, на втором входе которой зафиксирован сигнал с порогового элемента 5. На выходе схемы совпадения 10 появляется сигнал, поступающий на запрещающий вход (вентиля 7, препятствуя прохождению сигнала а.х и на вход выходной .схемы //. На выходе этой схемы появляется непрерывное управляющее воздействие по второму каналу, реверсирующее систему. Полярность этого воздействия направлена на уменьщение абсолютной величины цроизводной.
При дальнейшем у:меньшении рассогласования, гири условиях
I + « КI и I Ал j I Ал:,
нсчезает сигнал с выхода порогового элемента 5, снимая тем самым сигнал с выхода схемы совпадения 10. Текущее значение производной ах, с дифференциатора 2 через вентиль 6, импульсное звено 5 и вентиль 7 поступает «а ВХОД выходной схемы 11. На выходе этой схемы появляется импульсное управляющее воздействие ло третьему каналу, амплитуда которого определяется абсолютной величиной производной, а полярность направлена на уменьшение этой величины, независимо от значения и зиака рассогласоваиия.
Регулятор отличается высоким быстродействием, приближая процесс регулирования к оптимальному по быстродействию. Одновременно повышается статическая точность регулирования за счет более узкой зоны нечувствительности трехпозиционного и порогового релейных элементов. Значительно уменьшена и величина перерегулирования за счет более раннего включения непрерьшного управляюш.его 1воздействия при разгоне и реверсе системы.
Пред.мет изобретения Регулятор для инерционных объектов, содержаш ий формирователь ошибки, соединенный с первым входом сумматора, дифференциатор, вход которого подключен к выходу формирователя ошибки и ко второму входу сумматора, двухпозиционный релейный элемент, импульсное звено, пороговый элемент, соединенный с выходом сумматора и трехпозиционный релейный элемент, выход которого связан с первым входом запираюшего вентиЛя И первым входом выходной схемы, выход которой через исполнительный механизм связан с объектом регулирования, соединенным с формирователем ошибки, отличающийся тем, что, с целью улучшения качества регулирования, он содержит второй запирающий вентиль, соединенный с выходом импульсного звена и схему совпадения, первый вход каторой через двухпозиционный релейный элемент подключен а выходу первого запирающего вентиля, а второй вход - к выходу порогового элемента, связанного с выходом формирователя ошибки, выход схемы совпадения соединен со вторым входом выходной схемы и с запрешаюшим входом второго запирающего вентиля, ВЫХОД которого подключен к третьему входу выходной схемы, при этом второй вход первого запирающего вентиля связан с
дифференциатором, а выход - со входом импульсного звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ РЕГУЛЯТОР ИНЕРЦИОННЫХ ОБЪЕКТОВ | 1970 |
|
SU277906A1 |
| Регулятор для инерционных объектов | 1973 |
|
SU446026A1 |
| Регулятор | 1979 |
|
SU830299A1 |
| КВАЗИОПТИМАЛЬНЫЙ ПО БЫСТРОДЕЙСТВИЮ РЕГУЛЯТОР | 1971 |
|
SU308415A1 |
| Многоканальный регулятор | 1985 |
|
SU1290253A1 |
| Регулятор для инерционных объектов | 1976 |
|
SU612204A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ВОЗБУЖДЕНИЯ | 1971 |
|
SU311359A1 |
| Многоканальный регулятор | 1983 |
|
SU1092472A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Релейно-импульсный регулятор для объекта второго порядка | 1980 |
|
SU943640A1 |
