Известны устройства для управления злэктроприводом биоэлектрического протеза, содержащие двухканальную электронную схеivr управленияе усилитель мощности и эпек- трсавигатепь. Однако эти устройства, по- ( - йены по схемам с использованием репейнс. -о или частотно-импульсного метода yriравлания электропривода. В случае репейного метода оказывается невозможным про- поршюналь-ное управление, когда выходная величина изменяется пропорционально нзмеF кт-ю входно- величины. В случае же ис- иэг ьзоввния чаг;тсгнО -импупьсиого метода ynpjJKjoK3-t: успсбие пропорциональности выполнае-тся,, ю ггои уменьшении величины
входного cKiHana движение электропривода станови --;я не плавным, а скачкообразным.
Прадпагае;.09 устройство в отличие от KBcrf-T-ibrx. содержит детектор, сглаживающий фильтр, управляемый мультивибратор ,1 усг лите/; .-формирователь. Устройство - выполнении обеспечивает плавно е эпорц: оне :-ное управление при малых vr ;i,..; зхош1ых управляющих сигналов, raii как 1ри зтом методе изменяется не
частота следования импульсов, а ширина (длительность) этих импульсов. Кроме то|го, для обеспечения разделительного управления каждым каналом в предлагаемом устройстве установлены блокирующие цепочки, ;выполненные, например, в виде днодно-конденсаторных цепочек.
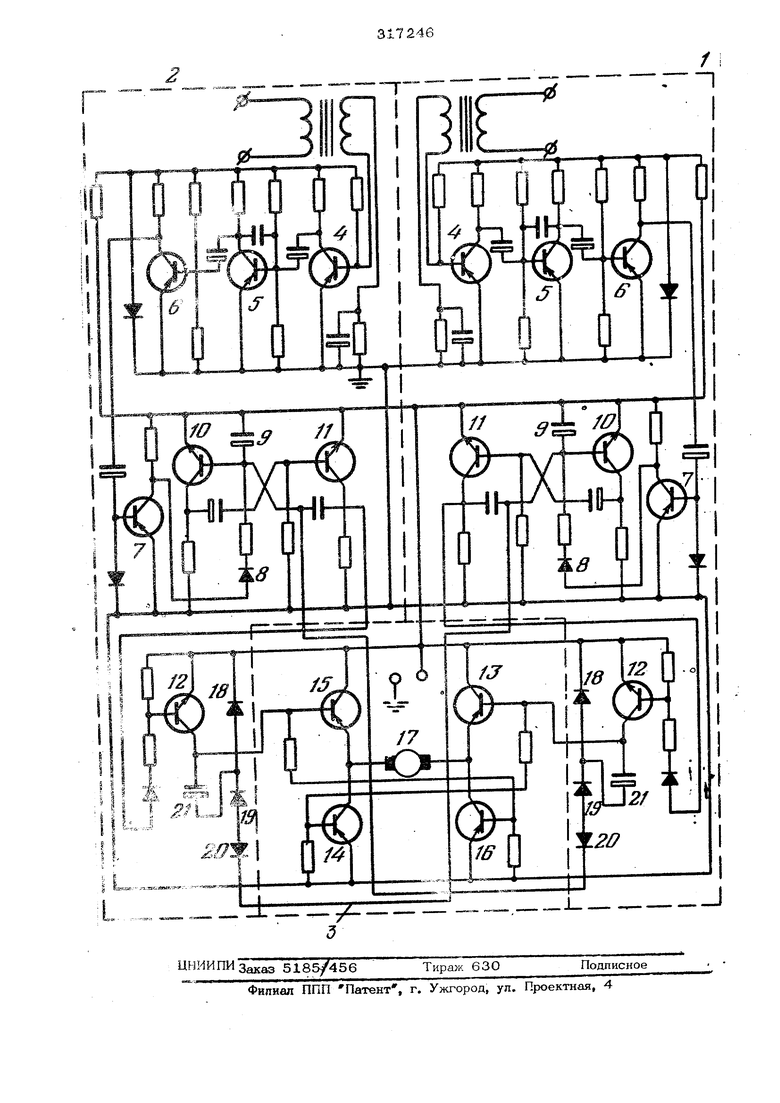
На чертеже изображена принципиальная Iэлектрическая схема предлагаемого устройства.
I Оно содержит даа одинаковых канала 1 и 2 управления и выходной каскад 3, Каждый канал управления имеет трехкаскадный усилитель биоэлектрических потенциалов, вьг(Полненный на транзисторах 4,5 и 6, базовый детектор на транзисторе 7, сглаживающий фильтр на полупроводниковом диоде 8 и конденсаторе 9, управляекпый мультивибратор, собран1Пз1й на транзисторах 10 и 11, уС(1питель- }юрмирователь импульсов на транзисторе 12. Выходной каскад 3 собран на транзисторах 13-16 по мостиковой схеме. В диагональ моста, образованного этими транзисторами, включен реверсивный двигатель 17. В каждом канале управления устаноБпены блокирующие цепочки выпоп Ю 1Вые на диодах 18™20 и кондечсвто ех 21о
Сигналы биоэлектричесщ1Х потет-щиапов отводятся с помощью наклалных того съемников и подаются на входньЕе трансфор маторы треххаскадных усипнтепей в кана-- j пах управпешга. Усиленное напряжение с выходов усилителей тс,е, с транзисторов 4) поступает на вход базовых детекторов,, мешающих функциидетект-ирования и усйле™ НИИ напряжения. Выходное наггряжение с тршетисторов 7 череа сг-паживаюшие фипьт ры поступает на базу транзистора 10 управляемых мультивибраторов.
При отсутстзии биосигнала на входе усилителя мультивибратор заторможеКг так как напряжение на базе траначстора 1О равно нулю. При по явлении биоэлектричесдсого сигнале на входе .канала 1 управпешш cooTBeitjiBeHHO у, чивается положительный потея1диад на базе j транзистора 10 управляемого ьцпштнвибра- тора что выводит его из заторможенного ; состоян1-Шо Мультивибратор начинает генери. ровать ймпульсы: прямоугольной формы, ширина (дпительность) которых изменяется пропорщюнапьно иаменению уровня биосиг нала на входе усилителя. Такая пропорци« ональность достигается соо-тветствующим БЬЬ бором элементов базового детеггора и уп равляемого гу гльтивибратора. Импульсы мул Т1юибратора5 усиленные и сформированные транзистором 12 отгфывают одно плечо мостиковой схемы выходлого каскада 3,;. cooTBeW ствующее рассматриваемом - каналу 1 -Реверсивнь Й электродвигате-ль 17 постоянного TOKajiBifflio4eHHbifl в диагональ моста, идменяет обороть в зависимости от широты (дпи тельности) нмпудызоВг поступакяцих с удр8В ; пяемого|мупь-г тЕбра;гора, Канал 2 упрезде ния работает анелогкчкым образом. Напи. чие второго канала обеспечивает реверс ре вере явного /гВйЕ ателя 17, Чтобы предогвраиггь выход из строя транзисторов выхощюго каскад; 3 (в случае одновременного срабатывании, обоя каналов уиравлеквд) пред мог-рен.й; ьные блокирующие цепочкНд собрйщгьтй на диодах и кодденсаторах 21 Б каж дом иа канелове. С этек деш -мей: при рабо1 е одного аз кеналов управйевяя (наиример канеяа 1) кадегкно аатормшг-аша
ется управляемый мультивибратор другого cuiviMeTpHiHoro канала и наоборот. Например, если в данный момент работает плечо вы- ; ходнога каскада на транзисторах 13 и 14, то переменное напряжения с коллектора транзистора 12 канала 1 через конденса-; тор 21 этого канала поступает на блоки- рующую цепочку того же канала на дио- | дах 1S-20, Блокирующая цепочка канала 1 при siOivi- детектирует и сглаживает пере мениск напряженивг которое в свою очеред: надежно затормаживает управпяе,мый муль-- : тивибратор на транзисторах 10 и 11 ; нала 2 путем под8чи на базу транзистора 10 этого канала отрицательного потенци ала,, В ото ствие же управляющего биосиг напа на входе усилителя потенциал колпек тора тралаистора 12 канала 1 постоянен и не передается на блокирующую цепочку благодаря наличию в ней конденсатора 21, Таким образом,оператор с помощью опи санного устройства; поочередно изменяя уровен;ь биоэлектрических потенциалов пары выбранных мышц, производит раздельное, пропорхгюпальное и плавное управление и реверсирование электропривода по необходи мой программе. При этом скорость и усипиег развиваемое электроприводомр пропор, циональны уровню биопатенцкалов ьдышц. Формула изобретения 1е Устройство для управлений электро приводом биоэлектрического протеза, содер-. жашее двухканальн)ю электронную cxeivsy управлениЯг усилитешь мощности и электродвигателЬ;, о т п и ч а ю щ е е с s лем,. что, с целью обеспечения плавного г iipo. пор циональпого управления при малы;;; Бходньпс управляющих сигналов путем щиротйо имп:.(льсной модуляции управлйющц-;; сигналов, в нем ус вноьпены детектор, аглегкввающий фильтр, управляемый мупьттгакг ред-ор и ус;;шитепъ-формирс атель й- Устройство но Hs Ig отличав 3Mj 4TOs с целые обеспечения раэдепьного управления каждым каналом, в нем установлены блокирующие цепочки вы irfoiTHeHKHBj напримерв в виде диодно- «о11ден« са.горных депочек.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БИОЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ПРОТЕЗОМ ВЕРХНЕЙ КОНЕЧНОСТИ | 1974 |
|
SU433702A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ БИОЭЛЕКТРИЧЕСКИХ ПРОТЕЗОВ | 1967 |
|
SU198524A1 |
| Протез предплечья с биоэлектрическим управлением для детей | 1978 |
|
SU766594A1 |
| Биолектрическая система управления протезом верхнейКОНЕчНОСТи | 1978 |
|
SU728232A1 |
| Биоэлектрическая система управления протезом верхней конечности | 1973 |
|
SU467742A1 |
| Устройство для управления электроприводом биоэлектрического протеза | 1969 |
|
SU280766A1 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Усилитель мощности для протезов с биоэлектрическим управлением | 1964 |
|
SU458315A1 |
| СИСТЕМА ОБРАБОТКИ СИГНАЛОВ | 2006 |
|
RU2326359C1 |
| Детектор сигнала в системах биоэлектрического управления протезами (его варианты) | 1984 |
|
SU1247008A1 |