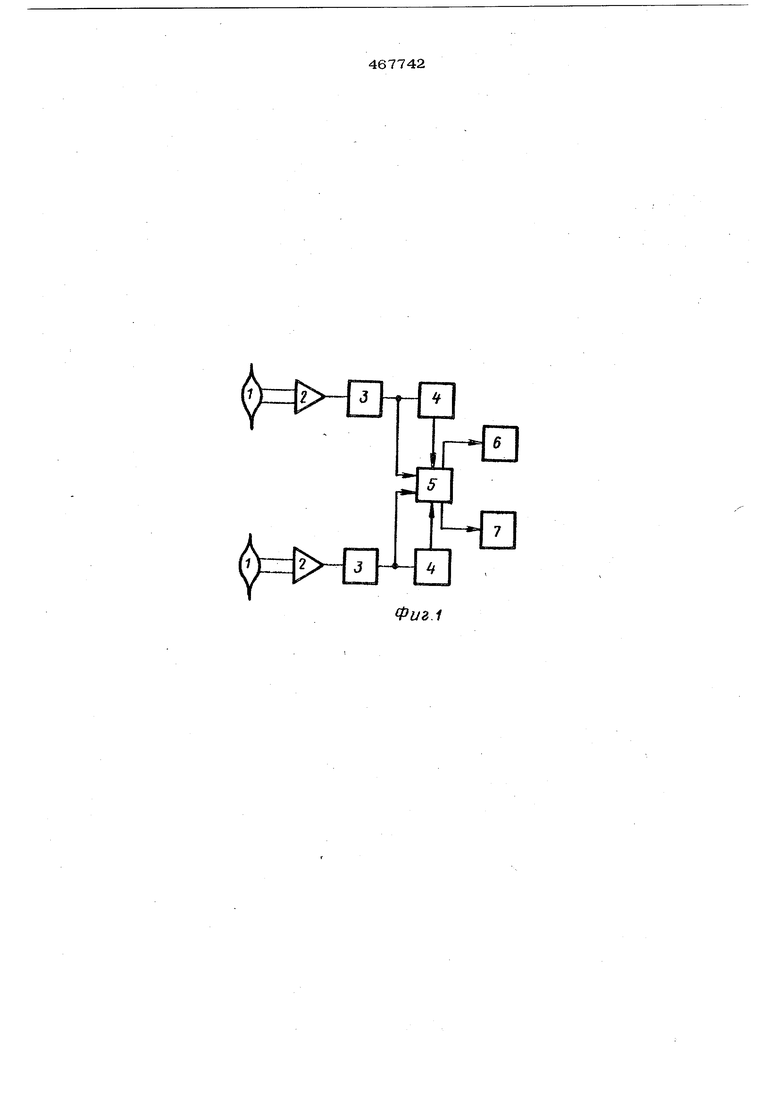
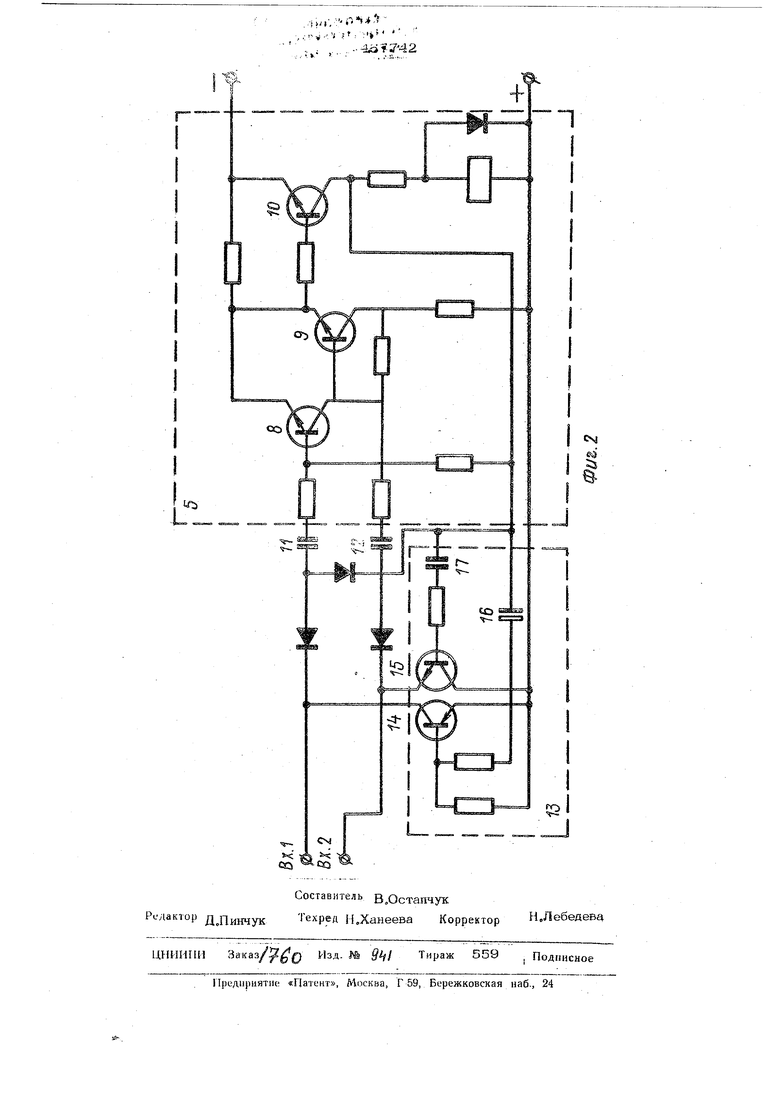
мы управления подключен исполнительный механизм 6, например, электропривод ки-t сти. Биоэлектрический сигнал, снимаемый с мышцы сгибателя кисти посредством : токосъемников 1, усиливается усилителями 2 напряжения, сглаживается в блоке 3 преобразования и включает реле усилителя 4 мощности, контакты которого подклю- ,чают электропривод кисти к источнику питания. Осуществляется схват кисти. При пода че плавно нарастающего сигнала с мышцы разгибателя кисти аналогичным образом осуществляется раскрытие кисти. Быстрая и кратковременная подача сигнала с мышцы разгибателя с амплитудой примерно вдво превышающей порог срабатывания канала управления приводит к образованию дифференцированного импульса после емкости 11, амплитуда которого превышает порог срабатьша1шя логического переключающего устройства. При переходе во второе устойчивое состояние к выходу системы управления подключается второй исполнительный механизм 7 - механизм ротации. Управление пронацией и супинацией осуществляется по добно тому, как осуществлялся схват и раскрытие. Переключение с механизма ротации на механизм кисти произойдет при подаче быстрого и кратковременного сигнала с мышцы сгибателя. Инвалид быстро усваива ет алгоритм управления и безошибочно осуществляют управление. В случае, когд необходимо использовать только одну мышцу для переключения, оба входа логического переключающего устройства соединяются не автономно, а с одним блоком преобразования любого из каналов управления. Этим обеспечивается расширение показаний для назначения протеза инвалидам. , Тзк как сигнал на переключение цоступает одновреметгао как на усилитель 4 мощно- СТИ, так и на логическое переключающее устройство, TOf чтобы не осуществлялось ложное движение электроприводов в момент переключения, что может быть причиной нежелательных действий, на входе логического переключающего устройства 5 установлены цепи 13 задержки, выполненные на транзисторах 14 с емкостью 16 и транзисторе 15 с емкостью 17, которые на период подачи коммутирующего сихнала предотвращает ложное движение. Предмет изобретения Биоэлектрическая система управления протезом верхней конечности, содержащая электроприводы, токосъемники, усилители напряжения, интегрирующие цепочки, усилнтели мощности и релейные каскады, о т Ji ичающаяся тем, что, с целью управления двумя парами движений как от одной, Так и от двух мыщц при уменьщении затрат мышечных усилий, установлено логическое переключающее устройство, выполненное в виде триггера с дифференцирующими емкостями, вход которого соединен с интегрирующими цепочками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Биолектрическая система управления протезом верхнейКОНЕчНОСТи | 1978 |
|
SU728232A1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| Протез предплечья с биоэлектрическим управлением для детей | 1978 |
|
SU766594A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| Протез верхней конечности | 1988 |
|
SU1627172A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 1969 |
|
SU251139A1 |
| Протез плеча | 1989 |
|
SU1666104A1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2017 |
|
RU2673151C1 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |