Изобретение относится к протезо:строению с использо.вание биоэлектряческл-х потеициалов.
Известные устройстша для управления пр.иводом биоэлектрического етротеза, содержащие два канала, в каждом из которых установлены усилитель напряжения и бло,к Считывания и П|рео,бразования .импульсов, и, кроме того, общ|ие для оболх каналов усилитель .мощности и электродвигатель, не обеспеч-ивают высокого качества управления, поскольку они ИСлользуют у1П1ра;вляющ1ие двигателем импульсы постоянной длительности. Т.ак/ие импульсы не позволяют однов|ремен-но обеспечивать высокую точность и ма/каимальные значения скорости И СИЛЫ с.хвата, развиваемые пальцами искусственной .кИСти П|роТеза.
Предлагаемое устройство отличается от известных тем, что в блоке считывания и лреабразования силналав каж1дого канала установлено корректирующее зв&по, на.приьмер, в виде диодного интегратора. Такое вьипоЛНение уст-, ройства -позволяет повысить качество управления и Расщярить динамический диапазон путем изменения длительности уп1ра1вляющ|их и.мпулысов.
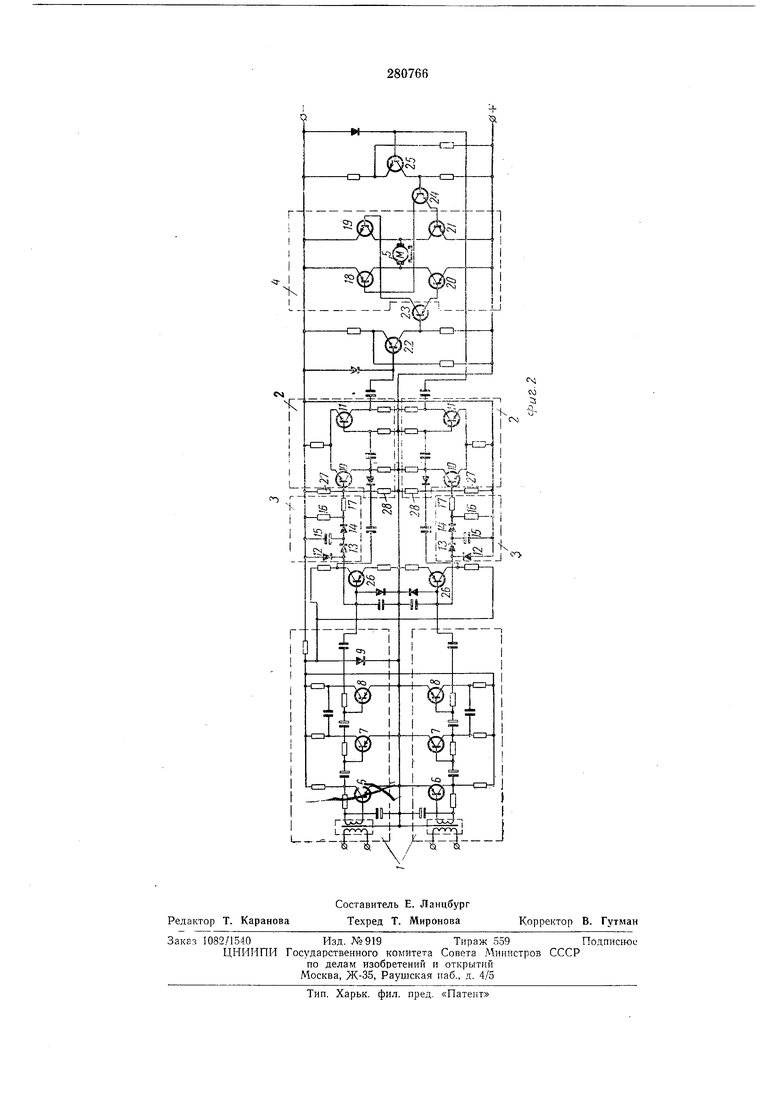
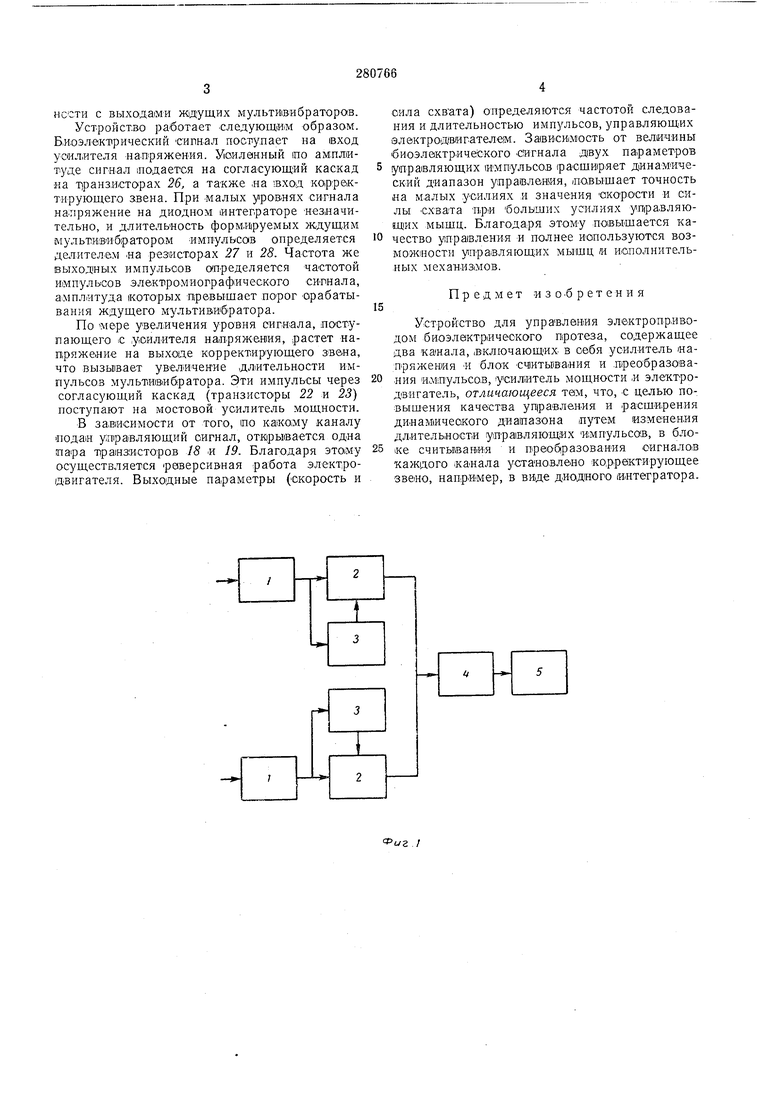
из Которых имеется усило1тель У напряжения и блОк 2 считывания и преобразования импульсов. Е блоке 2 каждого канала установлено корректирующее звено 3. Сигналы с блоков
поступают в усилитель 4 мощности, соединенный с эле1ктрод1в:игателбм 5. Ввеаен ис ксрректирующих звеньев в блоки считывания и преобр.азования импульсов поззолЯет осуществлять не только управление частотой следования у|Правляющ х Г1М1пульсов, но и их дЛ|Итель.нагтью.
Т/рехкаскадный усилитель 1 напряженИя с отрицательной обратной связью шыдолНСН на трех транзисторах 6, 7, 8 типа ПП. ПитЯН ие
усилителя напряжения осуществляется стабиЛ1изированным напряжением, снИ|Маемым со стаб.илизатора 9.
БлОК 2 сч1итывания и преобразования я мпульсав .выполнен на базе ждущего мультивибратора с коллекторным запуском, собранного на транзистора.х 10 и 11.
Корректирующее звено параллельного типа представляет .собой диодный интегратор на диОДах 12, 13, 14, емкостях 15 .и резисторах
16 и П.
Мостовой усилитель мощности, выполненный по эдостовой схеме, собран на транзПСтоpiax 18, 19, 20, 21.
нести с выходами ждущих мультивибраторов.
Устройство работает Следующим образом. Биоэлектрический «сипнал поступает на вход усил.ителя напряжения. У1аилвнный ио ам.плитуде сигнал шодается на согласующий каскад ка Т1ранзистарах 26, а также ,на вхо;д кар:ре,ктирующего з;вена. При малых уровлях сигнала натфяжение на диодном интеграторе незначительно, и длительность форм.И|руемых ж,дущ,им мульти Виб)ратором импульсов определяется делителе1М «а резисторах 27 и 28. Частота же выходных импульсов определяется частотой импульсов электромиографического сИЛнала, амплитуда которых превышает порог Орабатывания ждущего мультивибратора.
По мере увеличения уровня сигвала, наступающего с у.оилителя налряжевия, растет напряжение на выходе корректирующего звана, что вызы1в.ает увеличение .длительности импульсов мультивибратора. Эти импульсы через согласующий каскад (транзисторы 22 и 23) поступают на мостовой усилитель мощности.
В зависимости от того, по какО|Му каналу Подай управляющий сигнал, открывается одна пара Т|ра1нзи.сторов 18 и 19. Благодаря этому осуществляется реверсивная работа электродвигателя. Выходные параметры (скорость и
сила схвата) определяются частотой следования и длительностью импульсов, управляющих элактродаигателем. За1ви1СИ|Мость от величины биоэлектричейкого сигнала двух параметров управляющих импульсов расщирлет динамический диапазон уора1вле,вия, повышает точность на малых усилиях и значения скорости и силы схвата при больших усилиях удравляюЩ1ИХ мышц. Благодаря этому повышается качество управления и полнее попользуются возМОЖ1НОСТИ управляющих мышц и исполнительных механ.из1мов.
Предмет изобретения
Устройство для управления электроприводом биоэлектрического протеза, содержащее два канала, включающих- в себя усилитель «апряжения И блок сч1иты1ва.ния и .преобразования импульсов, усилитель мощности и электродвигатель, отличающееся тем, что, с целью повышения качества управления и расширения динамического диапазона путем изменения длительности управляющих «импульсов, в бло,ке считьБванил и преоб(разования сигналов каждого 1канала устаиовлено корректирующее звено, например, в виде диодного интегратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления двигательным аппаратом | 1988 |
|
SU1577784A1 |
| Активный протез нижней конечности с биоэлектрическим управлением | 1988 |
|
SU1731210A1 |
| БИОЭЛЕКТРИЧЕСКИЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ НА ВЕРХНЮЮ КОНЕЧНОСТЬ | 1973 |
|
SU384520A1 |
| Устройство для управления биоэлектрическим протезом плеча | 1985 |
|
SU1344351A1 |
| СПОСОБ БИОЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ СЕРВОПРИВОДАМИ ОРТОПЕДИЧЕСКИХ АППАРАТОВ | 1969 |
|
SU245990A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Устройство для управления электроприводом биоэлектрического протеза | 1967 |
|
SU317246A1 |
| Устройство контроля отношения сигнал-помеха | 1987 |
|
SU1509761A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Многоканальный преобразователь сопротивления в код | 1986 |
|
SU1411684A1 |