Координатограф относится к области средств автоматизации проектирования и может быть использован в автоматизированной системе проектирования для изготовления фотошаблонов печатных плат.
С помощью известного координатографа не удается изготавливать фотошаблоны печатных плат с высокой точностью и одновременным оперативным контролем правильности рисунка.
В предлагаемом устройстве правильность изготовленного рисунка печатной платы, начало и конец которого программно совмещены, характеризуется состоянием лимбов, измерительных линеек и индикаторных ламп схемы контроля, устанавливающихся в «нуль при правильно изготовленном рисунке, и показывающих величину ошибочного перемещения при наличии ошибок.
Это достигается благодаря тому, что в схему управления координатографа введен сумматор, который производит покадровое суммирование величин перемещения с учетом направления перемещения; на каждый микрометрический винт планшета координатографа установлен лимб, отградуированный в единицах линейного перемещения (одно деление 0,05 мм), а на неподвижной части планшета координатографа установлены измерительные линейки, отградуированные в единицах, линейного перемещения (в миллиметрах).
Измерительная линейка и лимб механически отсчитывают суммарное перемещение по каждой координате движения, т. е. выполняют роль механического сумматора. При этом электронный сумматор работает практически независимо, что значительно повышает эффективность и достоверность контроля.
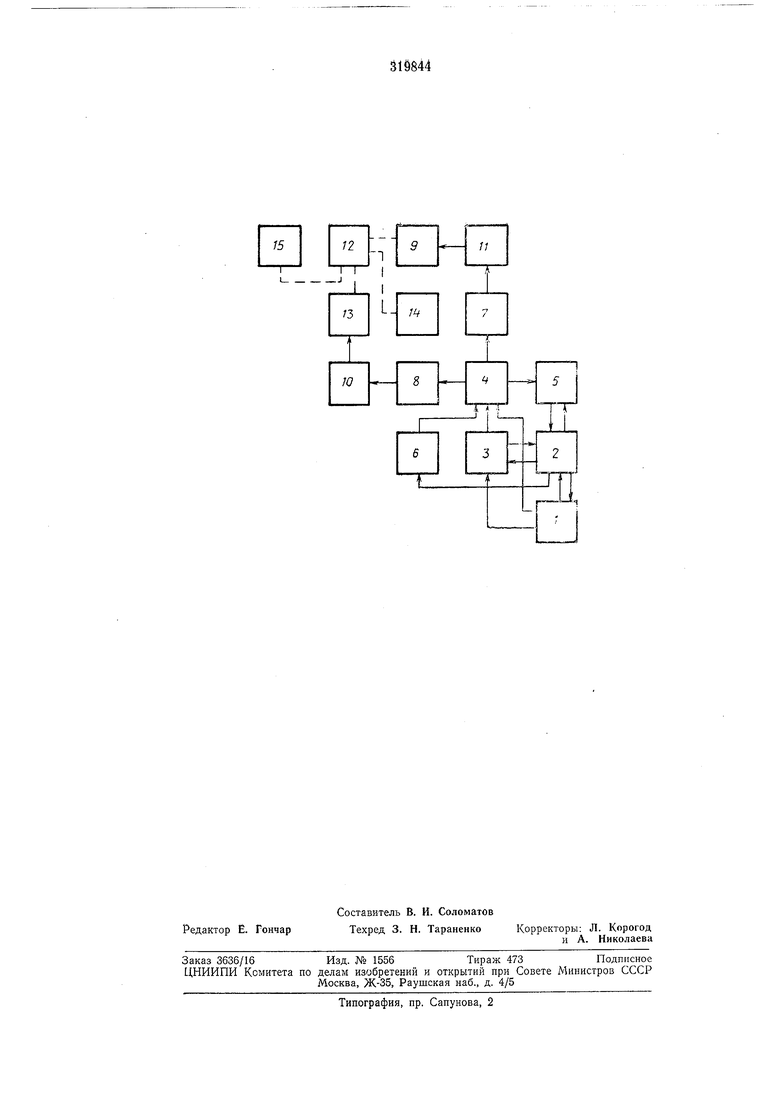
На чертел е приведена схема предлагаемого устройства.
Блок фотоввода 1 соединен с блоком управления и индикации координатографа 2 с регистром-счетчиком перемещения 3 и с регистром направлений 4. Блок управления и индикации 2 соединен активными связями с регистром-счетчиком перемещения 3, сумматором 5 и генератором импульсов 6. Регистр-счетчик перемещения 3 своим выходом связан с регистром направлений 4. Выход генератора импульсов 6 соединен со входами регистра-счетчика
перемещения 5 и регистра направлений 4. Выходы регистра направлений 4 подключены на входы коммутаторов шагового двигателя 7 и шагового двигателя 8 и сумматора 5. Выходы коммутаторов шагового двигателя 7 и шагового двигателя 8 соединены соответственно со входами шаговых двигателей 10 и 11 координаты и У.
координатографа 12, а шаговый двигатель 10 координаты У совместно с лимбом 13 координаты У жестко связан со вторым микрометрическим винтом планшета координатографа 12. На неиодвижной части иланшета координатографа 12 установлены измерительные линейки 14 и 15 координаты и У.
Для нредлагаемого координатографа программа записана на перфоленте кадрами информации, которые представляют приращение линейного перемещения по отношению к предыдущему положению планшета координатографа. Начало перемещения и конец программно совмещены, т. е. рисунок печатной платы начинается и заканчивается з одной точке.
Перфолента с информацией рисунка печатной платы вводится но кадрам- в считыватель блока фотоввода 1. Кадр информации, проконтролированный в блоке управления и индикации 2, поступает в регистр-счетчик перемещения 5, где величина линейного перемещения запоминается. Код информации, характеризующий направления, поступает на регистр направлений 4, где дешифруется и подготавливает к работе коммутаторы шаговых двигателей одной из координат или обоих координат одновременно. После этого начинается отработка считанного кадра информации, т. е. с помощью блока управления и индикации включается генератор импульсов 6. Импульсы генератора импульсов поступают на вход регистрасчетчика перемещения и через регистр направлений на сумматор и соответствующий коммутатор шаговых двигателей (7 или 8). Каждый импульс генератора импульсов с помощью коммутатора шаговых двигателей (7 или 8) поворачивает вал шагового двигателя, а вместе с ним и лимбы (9 или 13) на 1°30, что соответствует линейному перемещению подвижной части планщета координатографа 12 по отношению к одной из измерительных линеек (14 или 15} на 0,025 мм. Эта же величина перемещения вычитается из содержимого в регистре-счетчике перемещения и прибавляется или вычитается (в зависимости от кода направления) в сумматоре. Как только содержимое регистра-счетчика перемещения становится равным нулю, из блока управления и индикации поступает команда запрета подачи импульсов из генератора импульсов и вырабатывается сигнал, который устанавливает регистр-счетчик перемещения и регистр направлений в исходное состояние и блок фотоввода производит считывание очередного кадра. Суммарная же величина перемещения запоминается электронным сумматором и индицируется на блоке управления и индикации, а также механическим сумматором на измерительных линейках координаты X или У (14 или 15) и лимбах координаты X или У (9 или 13). Эту величину перемещения возможно прочесть после отработки любого кадра информации и сравнивая показания обеих сумматоров в любое время можно убедиться в правильности работы координатографа. После отработки всех кадров ииформации оба сумматор а должны установиться в нуль. Это означает, что рисунок печатной платы выполнен правильно. Если же сумматоры не в нуле, то можно прочесть величину ошибочного перемещения на индикаторах блока
управления и индикации и на измерительных линейках и лимбах. Таким образом обеспечивается оперативный контроль правильности рисунка печатной платы без длительных измерений на специальном оборудовании.
Предмет изобретения
Координатограф, содержащий планшет с приводным механизмом на электрических шаговых двигателях, блок управления и индикации, блок фотоввода, измерительные линейки с лимбами и микрометрическими винтами координат X и У планшета координатографа, отличающийся тем, что, с целью повышения точности нанесения и возможности контроля наносимых рисунков, например, схем .печатных плат, в блок управления и индикации введены сумматор, регистр направлений, регистр-счетчик перемещений, причем вход сумматора соедийен с нервым входом регистра направлений, первый вход которого соединен с входом регистра-счетчика перемещений, первый и второй входы которого соединены с выходами блока фотоввода и генератора импульсов, выход которого соединен со вторым входом регистра направлений, третий вход которого соединен со вторым выходом блока фотоввода, а второй выход регистра направлений соединен через коммутатор приводного механизма с шаговым
двигателем вала координаты X, а третий выход регистра направлений соединен через коммутатор с шаговым двигателем вала координаты Y.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЕЧАТНЫХ ПЛАТ | 1972 |
|
SU330577A1 |
| Устройство для считывания графической информации | 1974 |
|
SU670943A1 |
| Устройство для контроля качества межслойных соединений печатной платы | 1978 |
|
SU781722A1 |
| Устройство для считывания изображений | 1983 |
|
SU1104554A1 |
| Устройство для подготовки данных на перфоленте для координатографа | 1980 |
|
SU949665A1 |
| Устройство для считывания информации с печатных плат | 1982 |
|
SU1072072A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для кодирования чертежей печатных плат | 1973 |
|
SU595752A1 |
| Устройство для контроля программ на координатографе | 1983 |
|
SU1149219A1 |
| БИ1ЛМФ | 1973 |
|
SU365721A1 |