1
Изобретение относится к автоматике и вычислительной технике, в частности к устройствам для считывания графической информации, и может быть использовано для измерения координат центров плоских выпуклых фигур правильной формы, например центров отверстий на иечатных платах и негативах печатных плат.
Известно устройство для считывания графической информации, содержащее планшет, выполненный в виде двух платформ X и Y, перемещаемых щаговыми двигателями по направляющим во взаимно перпендикулярных направлениях, неподвижный проекционный экран, смонтированный над платформами, датчики положения, соединенные с преобразователями сигналов датчиков в цис|)ровой код 1.
В этом устройстве наведение на точку, коордииаты которой должны быть считаны, производится оператором по увеличенному изображению окрестности кодируемой точки. Выход в окрестность точки осуществляется перемещением платформ.
Недостатки такого устройства заключаются в возможности появления грубых субъективных ошибок, вносимых оператором при наведении на точку, и в зависимости длительности измерения от тренированности и быстроты реакции оператора.
Известны устройства для автоматического считывания координат плоских изображений путем развертывающего сканирования изображения световым лучом и регнстрации изменения отраженного или проходящего света в точках изменения контрастности изображения 2.
Это устройство также содержит две перемещаемые относительно развертывающего светового луча платформы, нрнемник света и блок отсчета с двумя датчиками, преобразователями перемещений и реверсивными счетчиками.
К недостаткам устройства относится необходимость двукратного сканирования но взаимно ортогональным осям в целях исключения неопределенности, возникающей нри совпадении иаиравления сканирования с направлением линии изображения, и необходимость обработки нолучаемой информации на ЭВМ для ее интерпретации.
Наиболее близким ио технической сущности к предлагаемому устройству является устройство 3, содержащее нланщет,
механически связанный с щаговыми двигателями, датчики положения, подключенные к входам блока формирования квадранта перемещения, каналы преобразования, каждый из которых содержит реверсивный счетчик, входы уиравлеиия и счетный
вход которого подключены к управляющим и импульсному выходам блока формирования квадранта перемещения, блок управления приводом, выход которого соединен с соответствующим щаговым двигателем, и блок обмена информацией (блок вывода на перфоленту).
Распознавание кодируемых элементов чертежа и установка в необходимую точку осуществляются оператором при помощи оптического экрана, а кодирование проводится с автоматическим округлением величины приращения координат до величины, кратной щагу сетки точной бумаги, па котор ;, ю нанесен чертеж. Если элемент чертежа не лежит в узле сетки, оператор вручную набирает на клавиатуре величину поправки координат.
Недостатками данного устройства являются зависимость скорости измерения от оператора и возможность появления грубых субъективных ощибок, вносимых оператором, особенно при считывании насыщенных чертежей.
Цель изобретения - повыщёние точности измерения.
Указанная цель достигается тем, что устройство содержит блок определения положения планщета, выполненный в виде оптически связанных источника света и фотоприемника, расположенных по обе стороны от планщета, блоки определения середины отрезка, дополнительные реверсивные счетчики, сумматоры и логический блок. Вход логического блока подключен к выходу фотоприемпика, а выходы - к одним из входов блока обмена информацией и блоков определения середины отрезка, другие входы которых соединены с импзльсным выходом соответствующего блока формирования квадранта перемещения, а выходы - со счетными входами дополнительных реверсивных счетчиков, установочные входы которых подключены к разрядным выходам реверсивных счетчиков каналов преобразования и через сумматоры к входам блоков управления приводом. Разрядные выходы дополнительных счетчиков соединены с входами сумматоров, подключенных соответственно к блоку обмена информацией.
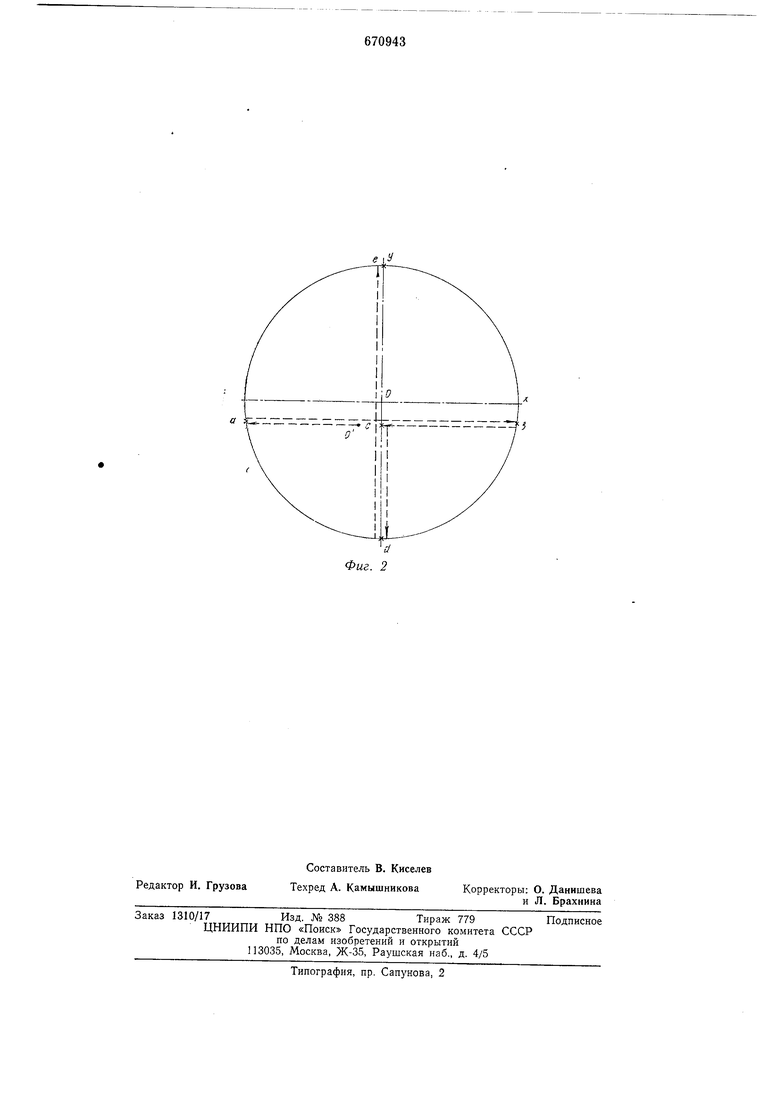
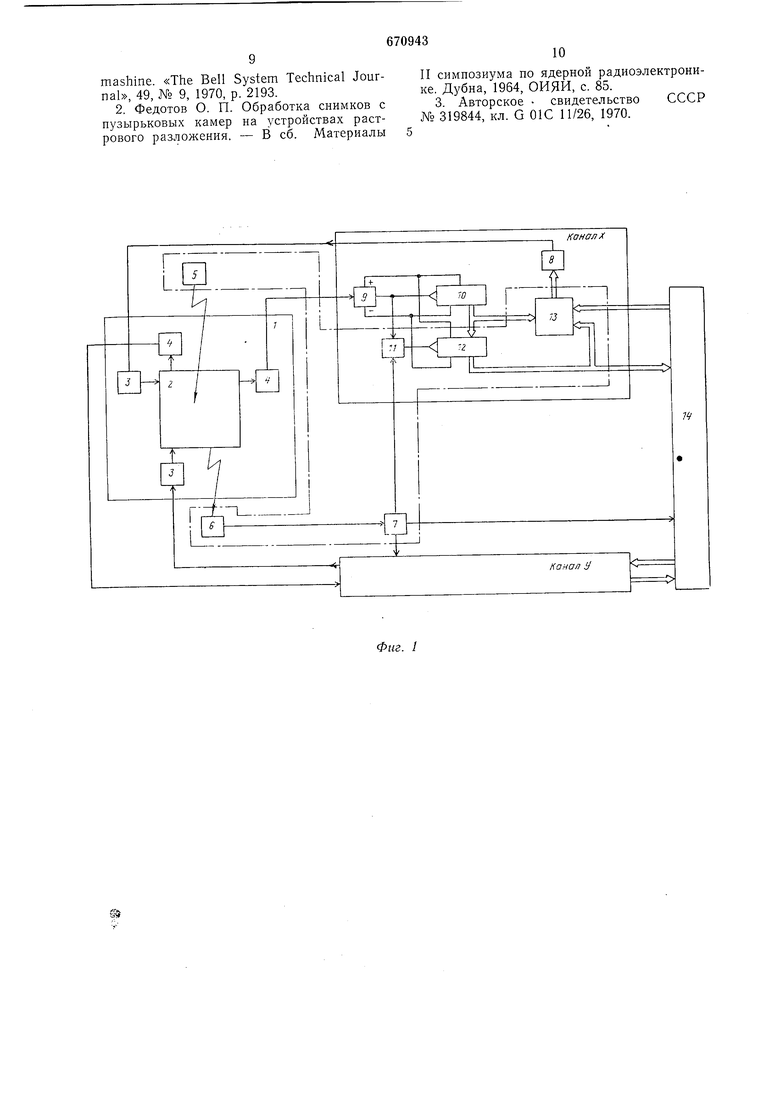
На фиг. 1 представлена структурная схема устройства. Фиг. 2 поясняет процесс нахожденпя центра круглого элемента на фотощаблоне.
Измерительный стол 1 имеет нланщет 2, на котором устанавливается измеряемый объект. Нланщет 2 снабжен кодовыми винтами X и Y, соединенными с щаговыми двигателями 3. Нланшет 2 измерительного стола 1 соединен с датчиками 4 положения, расположенными по каждой оси перемещения. На станине измерительного стола 1 установлены источник 5 света и фотоприемник 6, выполненный на базе фоточувствительного элемента, например ФЭУ, и соединенный с логическим блоком 7; обмотки возбуждения щаговых двигателей 3 связаны с блоком 8 управления приводом. Выходы датчиков 4 положения подключены к входам блока 9 формирования квадранта перемещения. Выход блока 9 формирования квадранта перемещения соедииеп со счетным входом реверсивного счетчика 10 и через блок II определения середины отрезка со счетным входом дополнительного реверсивного счетчика 12.
Выходы управления направлением счета ( + ) и (-) блока 9 формирования квадранта перемещения соединены с соответствующими управляющими входами ( + ) (-) наиравления счета реверсивного счетчика 10 и дополнительного реверсивного счетчика 12, выходы «О и «1 реверсивиого счетчика 10 - с одной стороны с входами сумматора 13, а с другой стороны - с входами установки «О и «1 дополнительного реверсивного счетчика 12. Выходы «1 дополнительного реверсивного счетчика 12 подключены к вторым входам сумматора 13 и к блоку 14 обмена информацией.
Третья группа входов сумматора 13 соединена с регистром координата X, находящимся в блоке 14 обмена информацией, выходы сумматора 13 - с соответствующими входами блока 8 управления приводом.
Управляющие входы блока И определения середины отрезка соединены с логическим блоком 7, под контролем которого осуществляется передача информации между различными частями устройства. Чтобы не загромождать схему, часть связей на чертеже не приведена.
Устройство работает следующим образом.
Измеряемый объект (чертеж, фотощаблон печатной платы, маска микросхемы, печатные платы и т. д.) крепится на планщете 2. Перед началом процесса считывания координат производятся совмещение осей координат измеряемого объекта и планшета 2, а также фиксация начала отсчета. Носле этого реверсивные счетчики 10 и 12 устанавливаются в исходное состояние.
Перечисленные объекты измерения обладают одним общим свойством. Они представляют собой комбинацию распределенных по нлощади прозрачных и непрозрачных участков. Например, на прозрачном основании нанесены непрозрачные линии или фигуры (фотощаблоны) и, наоборот, на непрозрачном основании имеются прозрачные линии или фигуры (отверстия в печатных платах, масках микросхем и т. д.).
Источник 5 света формирует параллельный пучок света с малым диаметром сечения. Световой луч падает перпендикулярно на поверхность обмеряемого объекта. За плоскостью обмеряемого объекта пепосредственно против источника 5 света размещается фотоприемник 6, реагирующий на изменение яркости светового луча. При перемещении планшета 2 в том или ином направлении световой луч (источник 5 света неподвижен) прочерчивает на поверхности обмеряемого объекта некоторую траекторию. При этом он пересекает прозрачные и непрозрачные участки объекта. Поскольку диаметр сечения светового луча выбирается меньше минимальной толшины, то в процессе перемещения планшета изменяется освещение фотоприемника 6, а следовательно, и уровень выходного сигнала последнего от некоторого максимального (по абсолютной величине) значения на прозрачном участке до некоторого минимального значения на непрозрачном участке. Так как положение планшета 2 в любой момент времени известно, то оно может быть зафиксировано и в момент изменения уровня освещенности приемника, т. е. могут быть зафиксированы координаты точки пересечения траектории светового луча с любой линией или контуром фигуры. Предлагаемое устройство может работать в нескольких режимах: считывание координат отверстий печатных плат по образцу или фотошаблону, обмер масок или фотошаблонов микросхем по заданной программе, измерение плоских геометрнческнх объектов методом сканирования и т. д. Наиболее полно отличительные особенности предлагаемого устройства проявляются при реализации режима измерения координат отверстий печатных плат по заданной программе. В исходном состоянии планшет 2 измерительного стола 1 устройства устанавливается в начале отсчета, реверсивные счетчики 10 и 12 и регистры координат в блоке 14 обмена информацией устанавливаются в исходное состояние «О, счетный и cтaновочные входы блока 12 открыты, входы фотоприемника 6 н логического блока 7 заблокированы. Из блока 14 обмена информацией заносятся координаты JQI и 01 центра очередного считываемого отвеостия, заданные на чертеже копструктооа (ввод исходной информации может производиться как с промежуточного носителя: перфоленты, магнитнои ленты, так и непосредственно из ЭВМ с помощью канала связи). Коды заданных координат центра измеряемого отверстия хранятся в течение всего времени обработки данного отверстия. Из блока 14 обмена информацией коды координат измеряемого отверстия поступают на входы соответствующих сумматоров 13 и являются одним из слагаемых. Роль второго слагаемого выполняет код текуще о полол ения планшета, снимаемый с реерсивных счетчиков 10 координат X и У. аким образом, на информацнонных выхоах сумматоров 13 появляются коды алгебраической суммы заданного и текущего положения планшета 2. Одновременно сумматором 13 определяется знак результата алгебраического сложения. Результат сложения и знак суммы поступают в блок 8 управления приводом перемещения плацщета 2. При результате сложения, отличном от нуля, блок 8 управления приводом включает шаговые двигатели 3. Паправление перемещения определяется знаком суммы и выбирается таким образом, чтобы точка объекта с заданными координатами совместилась с точкой пересечения световым лучом поверхностн измеряемого объекта. В более общем случае величина рассогласования между текущим н заданным положением планшета может служнть для задания скорости перемещения. Поскольку планщет 2 связан с датчикамн 4 положения, то последними с помощью блока 9 формирования квадранта перемещения в процессе движения планщета 2 формируется импульсный (унитарный) код перемещения, который с соответствующим знаком, формируемым в виде потенциалов на выходах (-f) (-) тем же блоком 9, регнстрируется в реверсивных счетчиках X и У: основном 10 и дополнительном 12. Поскольку логический блок 7 разрещает прямую передачу с блока 10 на блок 12, тг состояние реверсивного счетчика 0 навязывается дополнительному реверсивному счетчику 12, тем самым исключается рассогласование двух параллельно работающих счетчиков. По мере перемещения планщета 2 код, хранящийся в счетчиках 10 и 12, приближается к коду заданной координаты, следовательно, алгебраическая сумма на выходе сумматора 13 стремится к нулю. Как только cvMMa станет равной нулю, блок 8 управления приводом выключает шаговые двигатели 3. В результате световой луч оказывается внутри измеряемого отверстия, например, как показано на фиг. 2. Очевидно, что положение луча по отношению к истинному центру отверстия произвольно, нотому что факторы, определяющие истинное положетше центра отверстия, носят случайный характер. После выхода светового луча в заданную точку обмеряемого объекта управление перемещением цланщета 2 передается специальной программе логического блока 7. Первой командой логического блока 7 блокируется связь блока 8 управления приводом с сумматорами 13 и разблокируется вход фотопрнемника 6. По второй команде блок 8 управления приводом по координате X включает щаговый двигатель X (3)
так, чтобы платформа перемещалась в направлении точки а (фиг. 2). Как только световой луч пересечет границу отверстия в точке а, изменится уровеиь сигнала на выходе фотоприемника 6, что фиксируется логическим блоком 7. Блок 7 выдает очередную команду, по которой блок 8 управления приводом но координате X останавливает двигатель X (3). Одновременно ио команде логического блока 7 прекращается передача импульсов с выхода блока 9 на счетпый вход счетчика 12, блок II переводится в режим деления на 2, а прямая связь между блоками 10 и 12 заблокируется. Последующей командой блок 8 управлеиия приводом ио коордииате X снова включает двигатель X (3), изменив знак перемещения па противоположный так, что план1иет 2 перемещается в направлении точки а. При этом в счетчике 10 продолжает регистрироваться текущее положение планшета 2, т. е. когда световой луч пересечет границу отверстия в точке в и блок 8 унравлепия приводом по координате X по очередной команде логического блока 7 остановит двигатель X, в счетчике 10 будет храниться координата точки в. В то же время в дополнительном счетчике 12 будет регистрироваться только /2 пройденного отрезка пути, так как код перемещения поступает в даипом случае на вход дополнительного счетчика 12 е коэффициентом деления 2, следовательио, по достижении точки в в счетчике 12 координат хранится код координаты точки, определяемой выражением
у | al у
- - .
где Ха - координата X точки а;
iai -длина отрезка, ограииченного
точками а и Ь.
Таким образом, в счетчике 12 координат получен код координаты XQ истинного центра отверстия 0.
Затем логический блок 7 снимает блокировку связи блока 8 управлепия приводом двигателя 3 с сумматором 13 и разрешает доступ па вход схемы суммировапия сумматора 13 кода состояния дополнительного счетчика X (12) и заблокирует входы, связывающие сумматор 13 с регистром i;oopдинаты /Y I блоке 14 обмена информацией. При это.м на своих выходах схема В1,гдает разность между значением коордииаты истинного центра отверстия XQ и кодом текущего положения планшета Хь. Устройство отрабатывает указанную разность и перемещается в точку с координатой о, а затем приступает к измерению координаты YO истинного центра отверстия, которое осуществляется аналогично описанному для координаты X.
После считывания координаты центра отверстия по команде логического блока 7
состояние доиолнительных счетчиков 12 считывается в блок 14 обмена информацией, с помощью которого координаты истинного центра отверстия либо записываются на промежуточный носитель, либо передаются непосредственно в ЭВМ. Заключительной командой цикла логический блок 7 иереводит блоки устройства в исходное состояние, после чего оно готово к обработке следующего отверстия.
Применение предлагаемого устройства обеспечивает автоматизацию ряда технологических работ, в частности аттестацию фотошаблонов, печатных плат и масок гибридных микросхем, подготовку перфолент для сверлильного станка с программным управлением, позволяет повысить точность измерений и полностью исключить грубые ошибки онератора.
Формула изобретения
Устройство для считывания графической информации, содерлсащее планшет, механически связанный с шаговыми двигателями, датчики положения, подключенные к входам блока формирования квадранта перемещения, каналы преобразования, каждый из которых содержит реверсивный
счетчик, входы управления и счетный вход которого подключены к управляющим и импульсному выходам блока формирования квадранта перемещения, блок управления приводом, выход которого соединен с
соответствующим шаговым двигателем, и блок обмена, информацией, отличающееся тем, что, с целью повышения точности, оно содержит блок определения положения планшета, выполненный в виде
оптически связанных источника света и фотоприемника, расположенных по обе стороны от планшета, блоки определения середины отрезка, дополнительные реверсивные счетчики, сумматоры и логический
блок, вход которого подключен к выходу фотоприемника, а выходы - к одним из входов блока обмена информацией и блоIOB определения середины отрезка, другие вход1 которых соединены с импульсным
выходом гоответствуюпхего блока формирования квадранта псремещепия, а выхоД1,1 - со счетными входами дополнительных реверсивных счетчиков, установочные входы которых подключепы к разрядным
выходам реверсивных счетчиков каналов преобразования и через сумматоры к входам блоков-управления приводом, разрядные выходы дополнительных счетчиков соединены с входами сумматоров, подключенных соответственно к блоку обмена информацией.Ф Источники информации, принятые во внимание при экспертизе I. Ashlev F. R., Murphy Е. В., Savard Н. J.
А computer-controlled coordinate-measuring
mashine. «The Bell System Technical Journal, 49, № 9, 1970, p. 2193.
2, Федотов О. П. Обработка снимков с пузырьковых камер на устройствах растрового разложения. - В сб. Материалы
II симпозиума по ядерной радиоэлектронике. Дубна, 1964, ОИЯИ, с. 85.
3. Авторское свидетельство СССР № 319844, кл. G 01С 11/26, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания информации с печатных плат | 1982 |
|
SU1072072A1 |
| Устройство для считывания графической информации | 1973 |
|
SU667976A1 |
| Устройство для считывания графической информации | 1974 |
|
SU524204A1 |
| Следящее устройство для бесконтактного измерения параметров углового движения объекта | 1988 |
|
SU1562702A1 |
| УСТРОЙСТВО для КОДИРОВАНИЯ и ВОСПРОИЗВЕДЕНИЯ КАРТ ПОТЕНЦИАЛЬНЫХ ПОЛЕЙ | 1968 |
|
SU208345A1 |
| ЫТ:ввитое** *У*ЬАМ. Кл. G 05Ь 11/14УДК 621.316.7(088.8) | 1973 |
|
SU408269A1 |
| Устройство для считывания графической информации | 1974 |
|
SU554546A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1972 |
|
SU428416A1 |
| Преобразователь перемещения в код | 1987 |
|
SU1510083A1 |
| Устройство для программного управления процессом сборки интегральных микросхем | 1982 |
|
SU1151928A1 |