два триггера, реверсивный счетчик, четыре элемента И-НЕ, усилитель мощности и синхронизатор, вход которого является управляющим входом узла управления, первый выход синхронизатора подключен к одному из входов регистра, другой вход которого и один из входов второго и третьего сумматоров соединены с одним из выходов первого сумматора, другой выход которого подключен к D-входу первого триггера, С-вход которого, соединенный с S-входом второго триггера и вход см записи реверсивного счетчика, подключен к второму выходу синхронизатора, третий выход которого соединен с первыми входами первого и второго элементов И-НЕ, вторые входы которых, соединенные с первыми входами третьего и четвертого элементов И-НЕ, подключены к выходу второго триггера, С-вход которого соединен с выходом переполнения реверсивного счетчика, счетнйй вход которого подключен к выходу третьего сумматора, а управляющие входы - к выходам первого и второго элементов И-НЕ, третьи входы которых, соединенные с вторыми входами третьего и четвертого элементов И-НЕ, подключены к выходам первого триггера, причем С-вход второго триггера соединен с шиной нулевого потенциала устройства, а выходы третьего и четвертого элементов И-НЕ подключены к входам усилителя мощности, выход которого является выходом узла управления .
3. Устройство по п. 1, о т л и чающее С-я тем, что блок управления содержит три счетчика, два элемента И, элемент запрета, элемент ИЛИ, одновибратор и формирователь управляющих сигналов, выходы которого являются первым, вторым, третьим четвертым и пятым выходами.блока, вход первого счетчика является первы входом блока, выход первого счетчика соединен через первый элемент И с одним из входов второго счетчика и с одним из входов элемента ИЛИ, выход которогоявляется шестым выходом блока, а другие входы подключены соответственно к выходу одновибратора и триггера, один из входов которого соединен с пятым выходом формирователя управляющих сигналов, а другой соединен с первым входом третьего счетчика и является установочньм входом блока, второй вход третьего счетчика является вторым входом блока и подключен к первым входам одновибратора, формирователя управляющих сигналов и элемента запрета, второй вход которого, соединенный с вторым входом формирователя управляющих сигналов, с вторым входом одновибратора и третьим входог- счетчика, подключен к выходу второго элемента И, входы которого соединены с выходами второго счетчика, другой вход которого подключен к выходу элемента запрета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кодирования чертежей печатных плат | 1979 |
|
SU858029A1 |
| Устройство для контроля дефектов печатной платы | 1987 |
|
SU1406605A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1425738A1 |
| Устройство для контроля межслойных переходов печатной платы | 1980 |
|
SU947793A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Цифровой линейный интерполятор | 1986 |
|
SU1310779A1 |
| Устройство для управления считыванием графической информации | 1985 |
|
SU1357985A1 |
| Устройство для считывания графической информации | 1981 |
|
SU1013989A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1993 |
|
RU2069012C1 |

1. УСТРОЙСТВО ДЛЯ СЧИТЫВА-. НИЯ ИНФОРМАЦИИ С ПЕЧАТНЫХ ПЛАТ, содержащее планшет для крепления печатных плат, механически связанный с первьм координатным двигателем и первым датчиком положения, излучатель и фотоприемник, оптически связанные между собой и установленные на кронштейне, механически связанном с вторым координатным двигателем и вторьм датчиком положения, блоки преобразования координат, каждый из которых состоит из двух счетчиков, узла определения середины отрезка и формирователя импульсов перемещения, выходы которого подключены к входам первого счетчика и одному из входов узла определения середины отрезка вьКоды которого соединены с одними из входов второго счетчика, другие входы которого подключены к одним из разрядных выходов первого счетчика, другие разрядные выходы которого соединены с информационными входами, первой группы узла управления, выход которого подключен к входу соответствующего координатного двигателя, блок обмена информацией, первые информационные входы и выходы .которого соединены соответственно с выходами вторых счетчиков и информационными входами вторых групп узлов управления блоков преобразования координат, и блок управления, первый вход которого подключен к выходу Фотоприемника, первый выход - к первсму управляющему входу блока обмена информацией, второй, третий, четвертый и пять1й выходы - соответственно к входамчузлов определения середины отрезка и узлов управления блоков преобразования координат, от лличающееся тем, что, с целью повышения точности устройства, оно содержит блок умножения, сумматор и последовательно соединенные генератор импульсов, счетчик, дешифратор и формирователь импульсов сдйига и запрета, один из входов которого соединен с выходом генератора импуль-§ S сов, а первый выход - с первым входом блока умножения, второй - с первым входом сумматора, а третий - с вторьм управляющим входом блока обмена информацией, второй информацион-1 ный выход которого подключен к ин- S формационнетлу входу блока Умножения, выход которого соединен с вторым вхо дом сумматора, информационные выходы которого подключены соответственно к второму информационному входу блока обмена информацией, к третьим информационным входам узлов управления блоков преобразования координат, причем второй вход блока управления соединен с выходом дешифратора, а шестой выход лока управления подключен к управляющему входу счетчика, друго му входу формирователя импульсов сдвига и запрета, второму входу блока умножения и третьему входу сумматора. 2, Устройство по п. 1, о т л ич ющееся тем, что узел управления содержит первый сумматор, входы которого являются информационными входами первой и второй rpynrt узла, последовательно соединенные регистр, второй сумматор и третий сумматор.
Изобретение относится к автоматике и вычислительной технике и может быть использовано для автоматического базирования печатных плат при сверлении их на станках с числовым программным управлением (ЧПУ).
Известны устройства для кодирования чертежей печатных плат, содержащие блоки считывания меток, соединенные со счетчиками меток, блок управления, подключенный к координатному фотосчитывающему блоку, блочку установки нул.евых координат, блокам сравнения, входы которых соединены с соответствующими регистрами и счетчиками меток и через блок pe-i дактирования - с блоком памяти и Исполнительным блоком, механизм привода по двум координатам, соединенный со счетчиками меток, блок памяти и логические элементы И и ИЛИ ij .
Недостаток известного устройства состоит в том, что оно не обеспечивает автоматического считывания информации.
Наиболее близким по технической сущности к предлагаемому является
известное устройство для считЕлвания информации с печатных плат, содержащее планшет для крепления печатных плат, механически связанный с первым координатнь1м двигателем и первым
Q датчиком положения, излучатель и фотоприемник, оптически связанные между собой и установленные на кронштейне, механически связанном с вторым координатным двигателем и вторым датчиком положения, блоки преобразо вания координат, каждый из которых состоит из двух счетчиков, узла определения середины отрезка и формирователя импульсов перемещения, выходы которого подключены к входам пер0 вого счетчика и одному из входов узла определения середины отрезка, выходы которого соединены с одними из входов второго счетчика, другие входы которого подключены к одним из разрядных выходов первого очетчика, другие разрядные выходы которого соединены с информационными входами первой группы узла управления, выход которого подключен к входу соответствующего координатного двигателя, блок обмена информацией, первые информационные входы и выходы которого соединены соответственно с выходами вторых блоков преобразования -координат, и блок управления, первый вход которого подключен к выходу фотоприемника, первый выход - к первому управляющему входу блока обмена информацией, второй, третий, четвертый и пятый выходы - соответственно ко входам узлов определения середины отрезка и узлов управления блоков преобразования координат 2J . Недостаток такого устройства заключается в низкой точности, обусловленной величиной шага перемещения шагового привода, который из соображений производительности не может быть сделан малым, например единицыдесятки микрон; При обработке печатных плат на станках с ЧПУ возникает необходимость в привязке координатной системы платы к координатной системе ка для исключения параллельного смещения и разворота координатных осей платы относительно координатных осей станка. Цель изобретения - повышение точности устройства. Поставленная цель достигается тем устройство для считывания информации с печатных плат, содержащее план шет для крепления печатных плат, механически связанный с первым координатным двигателем и первым датчиком положения, излучатель и фотоприемник оптически связанные между -собой и установленные на кронштейне, механически связанном с вторым координатным двигателем и вторым датчиком положения, блоки преобразования координат, каждый из Которых состоит из двух, счетчиков, узла определения середины отрезка и формирователя импульсов перемещения, выходы которого подключены к входам первого счетчика и одному из входов узла определения середины отрезка, выходы которого соединены с одними из входов второго счетчика, другие входы которого подключены к одним из разрядных выходов первого счетчика, другие разрядные выходы которого соединены с информационными входами первой группы узла управления, выход которого подключен к входу соответствующего координатного двигателя, блок обмена информацией, первые информационные входы и выходы которого соединены соответственно с выходами вторых счетчиков и информационными входами вторых групп узлов управления блоков преобразования координат, и блок управления, первый вход которого подключен к выходу фотоприемника, первый выход к первому управляющему входу блока обмена инфоЕ 1ацией, второй, -третий; четвертый и пятый выходы - соответственно к входам узлов определения середины отрезка и узлов управления блоков преобразования координат, содержит блок уг1ножения, сумматор и последовательно соединенные генератор импульсов, счетчик, дешифратор и формирователь импульсов сдвига и запрета, один из входов которого соединен с выходом генератора импульсов, а первый выход - первым входом блока умножения, второй - с первым входом сумматора, а третий - с вторым управляющим входом блока сэбмена информацией, второй информационный выход которого подключен к информационному входу блока умножения, выход которого соединен с вторым входом сумматора, информационные выходы которого подключены соответственно к второму информационному входу блока обмена информацией и третьим информационньм входам узлов управления блоков преобразования координат, причем второй вход блока управления соединен с вы ходом дешифратора, а шестой выход блока управления подключен к управляющему входу счетчика, другому, входу формирователя импульсов сдвига и запрета, второму входу блока умножения и третьему входу сумматора. Креме того, узел управления содержит первый сумматор, входы которого являются информационными входами первой и второй групп узла, последовательно соединенные регистр, второй сумматор и третий сумматор, два тригг.ера, реверсивный счетчик, четыре элемента И-НЕ, усилитель мощности и синхронизатор, вход которого является управляющим входом узла управления, первйй выход синхронизатора подключен к одному из входов регистра, другой вход которого и один из входов второго и третьего сумматоров соединены с одним из выходов первого сумматора, другой выход которого подключен к D-входу первого триггера, С-вход которого, соединенный с S-входсм второго триггера и входом записи реверсивного счетчика подключен к второму выходу синхронизатора, третий выход которого соединен Q первыми входами первого и второго элементов И-НЕ, вторые входы KOToptjxVcoeдийенные с первыми входами третьего и четвертого элементов И-НЕ,. подключены к выходу второго триггера. Свход которого соединен с выходом переполнения реверсивного счетчика,, счетный вход которого подключен к выходу третьего суьлматора, а управляющие входы - к выходам первого и второго элементов И-НЕ, третьи входы которых, соединенные с вторыми входами третьего и четвертого элементов И-НЕ, подключены к выходам первого триггера, причем .D-вход второго триггера соединен с шиной нулевого потенциала устройства, а-выходы третьего и четвертого элементов И-НЕ подключены к входам усилителя мощности, выход которого является выходом узла управления.
Блок управления содержит три счетчика, два элемента И, элемент запрета, элемент ИЛИ, одновибратор и фop Шpoвaтeль управляющих сигналов, выходы которого являются первым, ВТО рым, треть им, четвертым и пятым выходами блока, вход первого счетчика является первым входом блока, выход первого счетчика соединен через первый элемент И с одним из входов второго счетчика и с одним из входов элемента ИЛИ, выход которого является шестым выходом блока, а .другие входы подключены соответственно к выходу одновибратора и триггера, один из входов которого соединен с пятым выходом формирователя управляющих сигналов, а другой - с первым входом третьего счетчика и является установочным входом блока, второй вход третьего счетчика является вторым входом блока и подключен к первым входам одновибратора, формирователя управляющих сигналов и элемента запрета7 второй вход которого, соединенный с вторым входом формйрователя управляющих сигналов, с вторы входом одновибратора и третьим входом счетчика, подключен к выходу второго элемента И, входы которого соединены с выходами второго счетчика, другой Вход которого подключен к выходу элемента запрета.
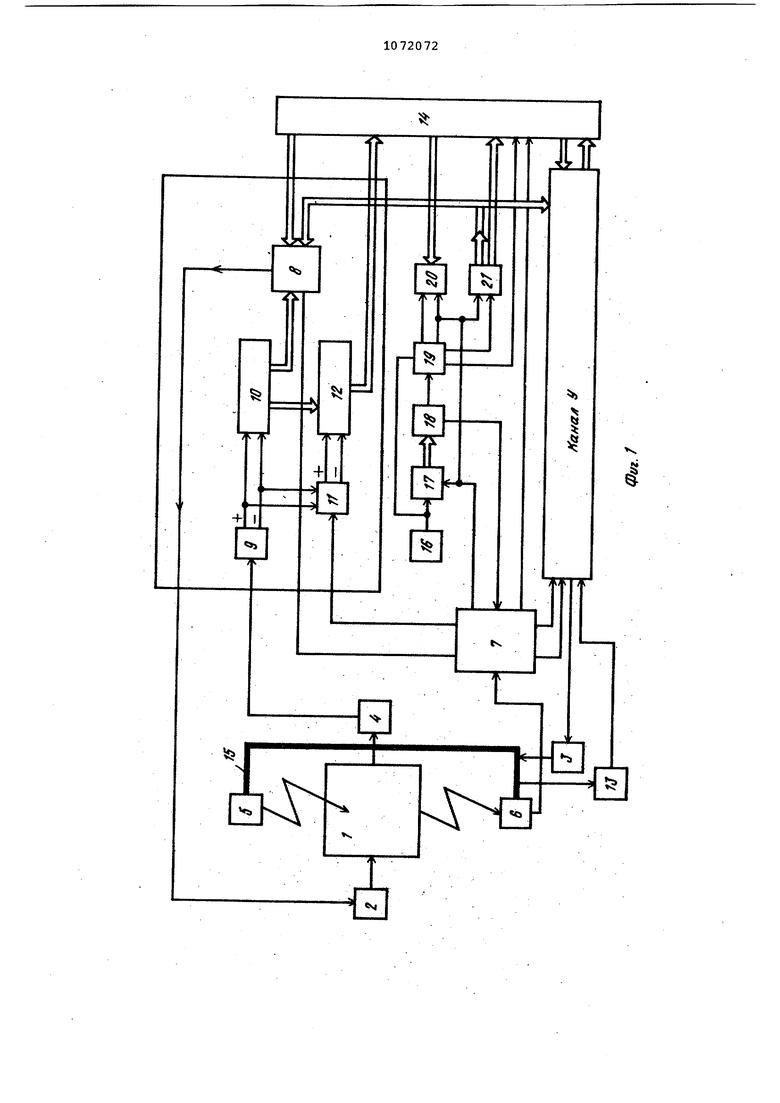
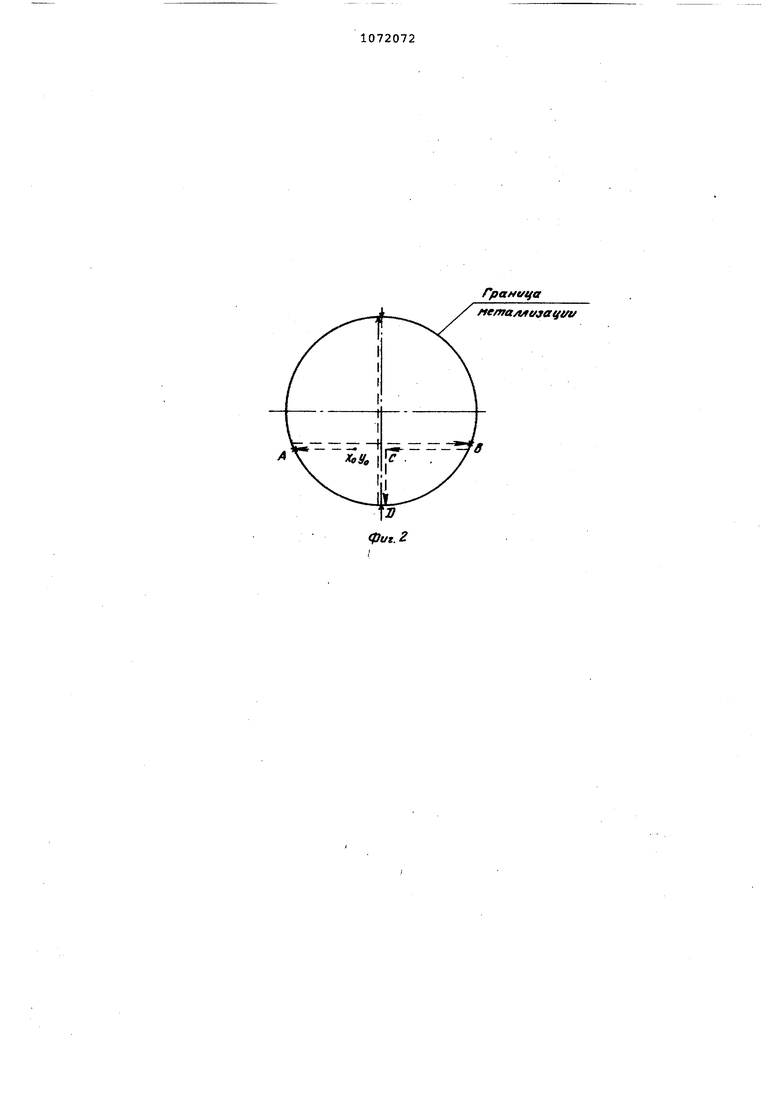
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - принцип определения центра контактной площадки на фиг. 3 - схема узла управления блока преобразования координат; на фиг. 4 - схема блока управления устройства.
Устройство содержит планшет 1 для крепления печатной платы, первый координатный двигатель 2 (перемещения по координате Х), второй координатный двигатель 3 (перемещения погкоординате У), датчик 4 положения X, излучатель 5, фотоприемник б, блок 7 управления, узел 8 управления приводом по координате X, формирователь 9 импульсов перемещения по координате х,Еэеверсивный счетчик 10,блок 11 опред
ления середины отрезка, дополнитель ный счетчик 12, датчик 13 положения по координате Y, блок 14 обмена информацией, кронштейн 15, генератор 16 импульсов, счетчик 17, дешифратор 18, формирователь 19 импульсов сдвига и запрета, блок 20 умножения и сумматор 21.
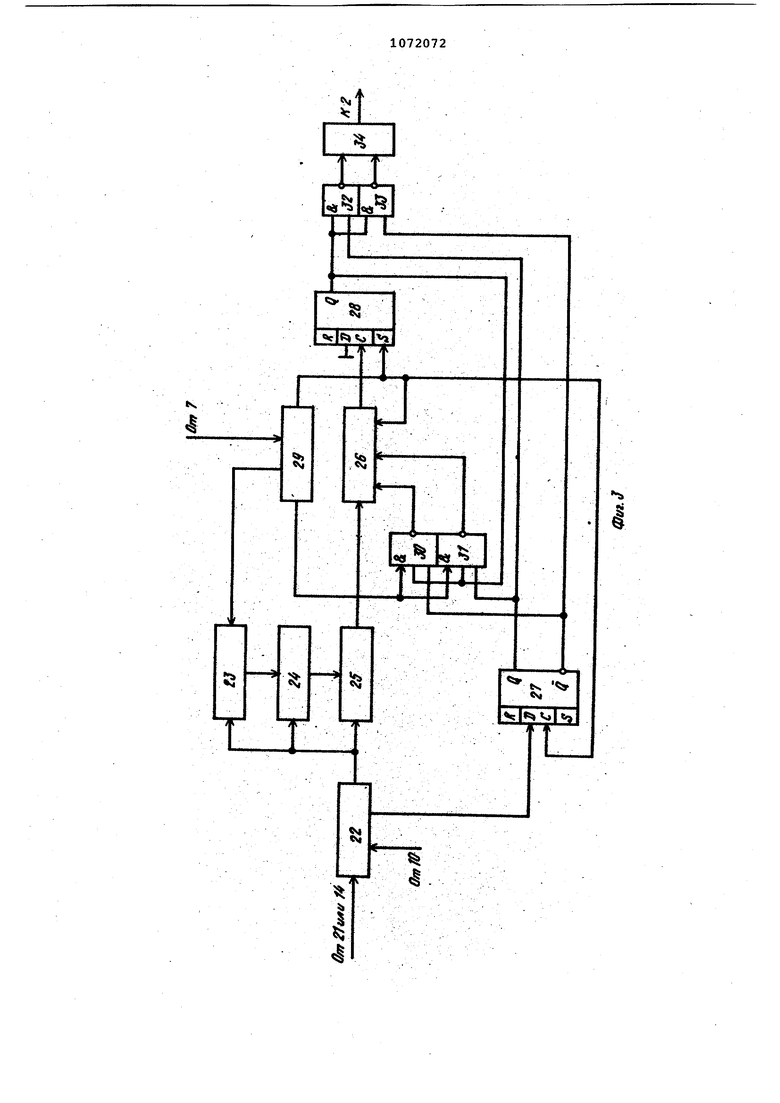
Узел В управления содержит первый сумматор 22, регистр 23, второй сумматор 24, третий сумматор 25, реверсивный счетчик 26, триггер 27 направления, выходной триггер 28., синхронизатор 29, элементы И-НЕ 30-1 33 и усилитель 34 мсвцности. Блок 7 управления содержит счетчик 35 числа координат центров реперов 35, элемент И 36, элемент запрета 37, счетчик 38, элемент И 39, элемент ИЛИ 40 однови.братор 41, двухразрядный счетчик 42, формирователь 43 управляюидах сигналов и триггер 44.
На печатной плате на стадии проектирования закладываются реперные отверстия, координаты центров которы 3 аданы.
Устройство работает следующим образом.
Печатная плата крепится на планшете 1 по технологической линии. Излучатель 5 и фотоприемник б устанавливаются в исходное положение. Затем определяются реальжге координаты центров реперов, которые вследствие параллельного смещения, разворота осей координат платы относительно координатных осей станка и усадки фотоматериалов отличаются от заданных при проектировании.. Зная идеальные (заданные при проектировании) и реальные (определенные при сканировании ) центры реперов, можно определить истинные центры отверстий с учетом параллельного смоцения и разворота платы относительно координатных осей станка и усадки фотоматериала, Для этого нужно опреде ть коэффициенты пересчета и затем координаты центров отверстий по формулам
Хр С к Хц + Са X Уц + С (,1)
fp С X Хц + Cj X YU + Cf
С2;
где индексы р и И соответствуют реальным и идеальным координатам;
С - С(, - коэффициенты пересчета.
Уравнения (1) и (2) определяют, v минимальное число реперов, необходикых для определения коэффициентов пересчета. Таких реперов должно быть три.
В исходном состояиии реверсивные счетчики 10 и 12 координат обнулены,, счетные входы счетчика 12 открыты, входы фотоприемника 6 и блока 7 управления заблокированы. По сигналу Пуск, из блока 14 обмена информацией в соответствующие узлы 8 управления приводами заносятся координаты YQ ТОЧКИ позиционирования в зот ну репера 1.фиг. 2) . После выхода в эту точку блок 7 управления разблокирует вход фотоприемника 6,и узел 8 (Управления включает координатный дви гатель 3 так, чтобы планшет 1 (платформа1 перемещался в направлении точ ки (фиг. 2). Как только сканирующий луч пересечет границу металлизации в точке А , изменится уровень сигнала на выходе фотоприемнийа б, что фиксируется блоком 7, который выдает команду узлу 8 на останов в точке А координата X которой зафиксирована в реверсивном счетчике 10. После останова планшета 1 прекращается передача импульсов с выход;(а формировател 9 на счетный вход счетчика 12/ блок 11 переводится в режим деления на 2, прямая связь между блоками 10 и 12 заблокируется. Затем 8 управления приводом по координате X ..снова включает двигатель, изменив знак перемещения на противоположный. В стет чике 10 продолжает регистрироваться .текущее положение платформы, и двигатель остановиться, когда сканирую щий луч пересечет границу металлизации в точке В (фиг. 2). Координата X этой точки находится в счетчике 10. В счетчике 12 будет рёгистр ироваться только йоловина пройденного отрезка пути, так как код перемещения поступает на Вход счетчика 12 с коэффициентом делешя 2. Таким образом, при достижении точки В в счетчике 12 хра нится координата точки, определяемой выражением Хр - Хд где Хд - координата X точки А; Ag - длина отрезка, ограниченног точками А и Bf Хр - реальная координата отверстия . Истинная координата Хр центра репера записывается в соответствующий регистр блока 14 обмена информацией. Затем узел 8 выводит планшет 1 (плат форму) в координату Хр и начинается измерение координаты Yp, которое осуществляется аналогично определению Хр После этого узел 11 переводится в исходный режим работы. Затем осуществляется сканирование 2-го и Это реперов, реальные координаты центров которых заносятся в соответствукедие регистры блока 14, Реальные и идеальные координаты центров реперов связаны соответствующими линейными уравнениями. В блоке 14 обмена информацией содержатся заданные при проектировании печатной платы постоянные величины (кристанты) с учетом знака. По управляющим импульсам, поступающим с формирователя 19, в блоке умножения (фиг. 1) начинается процесс вычисления соответствующих компонент линейных уравнений и коэффициентов, которые заносятся в соответствующие регистры блока 14 обмена инфор мацией. После определения всех коэффициентов из блока 14 загружается в блок 20 идеальная X координата первого обрабатываемого отверстия и код соответствукщего коэффициента. Реальные координаты центра отверстия определяются аналогично определению коэффициентов, а затем переписываются из сумматора 21 в соответствующие узлы 8 управления приводами по координатам V и Y . Узлы 8 управления прквода vai выдают команды на пози1Д1онирование планшета 1 (платформа станка) в заданную точку, а затем выдают сиг,нап Разрешение сверления. По статусному сигналу конца перемещения формирователя 19 блок 7 управления снимает сигнал блокировки и разрешает пересчет координат следукяцего отверстия. Координаты следующего отвер-т стия должны быть записаны в соответствуклцие регистры блока 14 из фотрсчитывающего устройства или из памяти ЭВМ (не показаны) за время обработки предыдущего отверстия. Узел 8 управления приводом . 3) работает следующим образом. На вход первого сумматора 22 поступает прямой код из сумматора 21 или блока 14 обмена информацией 14 и проинвертированный код с вьосода реверсивного счетчика 10 координаты. Первый cyivttiaTop 22 определяет разность меясду заданной и фактической координатой , которая поступает на входы второго 24 и третьего 25 сумматоров и регистра 23, перезапись из регистра 23 осуществляется по импульсу с выхода синхронизатора 29. Во втором сумматоре 24 из кода, поступающего с вцхода сумматора 22 вычитается код, записанный в.регистр 23 впредыда щем такте,,т.е. определяется пераая разность от ошибки, которая поступ ает на вход третьего сумматора 25. В последнем код ошибки складывается с кодом первой разности от сжшб-, ки, и результат постурает на вход реверсивного счетчика 26. Запись кода в реверсивный счетчик 26 осущестт вляется по импульсу с выхода синхронизатора 29. Этим ж1е импульсом устанавливается тригг 27, который определяет направление перемещения по значению старшего разряда сумматора 22, и триггер 28. На выходе одного из элементов и 33 в зависимости от направление появляется сигнал, который поступает на вход усигштеля 34 мощности и на выход узла 8. Высокий уровень с выхода триггера 28 поступает на входы элементов И-НЕ 30 и 31, открывая тем самым доступ высокочастотным импульсам с выхода синхронизатора 29 ка входы реверсивного счетчика, которые, если код положительный, поступают на шину вычитания, а если отрицательный - на шину сложения. При возникновении переполнения в счетчике 26 импульс поступает на вход синхронизации триг гера 28 и сбрасывает его, сигнал высокого уровня на выходе снимается Таким образом, на шлходе узла 8 управления формируется импульсный сигнал, длительность которого пропорциональна разнице заданного и истинного кодов с учетом первой разности от ошибки.
Блок 7 управления (фиг. 4) работает следующим образом, после определения координаты О 3-го репера, сигналом выхода элемента 26 снимается сигнал блокировки и разрешается счет в счетчике 38 числа определенных коэффициентов. Сигнал блок}5ровки при этом формируется одновибратором 41 после определения каждого коэффициента по импульсу от дш1ифратора 18, После определения последнего коэффициента сигнал с выхода элемента 39
запрещает работу одновибратора 41 и счет импульсов счетчиком 38, а также разраиает счет импульсов счетчиком 42. При определении координаты X центра отверстия на разрядных
5 выходах счетчика 42 устанавливается код 01, который разрешает формирование на выходе формирователя 43 импульса загрузки координаты X , для узла 8 управления приводом. Затем
0 формируется импульс загрузки для канала Y , ко±орый по установочному входу устанавливает триггер 44 и сиг нал блокировки на входе элемента ИЛИ 40. Этот сигнал снимается по кон5 ЦУ перемещения, разрешая пересчет следующей пары координат. При этом сбрасывается также счетчик 42..
Таким образом, в предлагаемом уст0 ройстве отпадает необходимость в
сканировании зоны каждого отверстия. Достаточно просканировать только 3 репера, определить аппаратурным путем коэффициенты пересчета C;j-C6 и 5 затем в процессе автоматизированного сверления на станке с ЧПУ определять каждую пару координат перед началом позиционирования к данному отверстию. Отказ от шагового привода позволяет Q повысить точность измерения, что особенно важно при обработке многослойных плат.
;и
$i
+
Nk
It
п
Ш15|
«telRt T
ILJL
ЕЭ
t4
M
,, i ж
cl
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для кодирования чертежей печатных плат | 1975 |
|
SU531172A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для считывания графической информации | 1974 |
|
SU670943A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
