Изобретение относится к автоматит зации монтажно-сборочных работ в про изводстве радиоаппаратуры на специальном технологическом оборудовании (сто) с шаговым приводом с числовым программным управлением (ЧПУ) и может быть использовано в радиопромышленности производства средств свя зи для монтажа объемных проводников на платы с навесными радиоэлементами в условиях серийного производства.. Известно вычислительное устройство для систем программного управлени двухкоординатными перемещениями, содержащее генератор тактовых импульсов, блок ввода программы с трансмиттером, линейный реверсивный интерполятор с реверсивным двоично-десятичным счетчиком, декадные переключатели, схемы совпадения, триггер переключения каналов, блок индикации и блок питания; а также згщатчик ско рости и узел стабилизации скорости перемещения координатного стола относительно сварочного электрода, узел работы и отвода координатного стола l . Недостатки этогр устройства состо ят в необходимости зещания контурной скорости на каждом участке отрабатываёмой программы, сложности обеспечения постоянства заданной контурной скорости и аппаратной сложности линейного реверсивного интерполятора. Кроме того, устройство- имеет ограниченное применение, так как не обеспечивает автоматически остановку после отработки заданного участка в момент перехода к обработке следующего участка. Известна также система числового программного управления металлорежущими станками Контур 2ПТ-71, са-держащая блок задания скорости, выходом соединенный со входами интеграторов, устройство ввода программы, выход которого подключен ко входу устройства памяти, первым выходом соединенного с блоком технологических команд, и по каждой координате управления последовательно соединенные блок управления, шаговый привод, датчик положения и блок сравнения, выход которого соединен с управляющим входом блока управления 5 . Однако эта система ЧПУ обладает существенными недостатками, так как необходимо программировать скорость подачи на каждом участке отрабатываемой программы, т.е. вводить
в программу код номера генератора блока задания скорости и код коэффициента деления частоты выбранного генератора с целью обеспечения одной из 32 скоростей подачи. Сложность поддержания равномерности И постоянства скорости подачи рабочего органа по ведущей координате, обусловленная нсшичием многочисленных счетчиков - делителей, триггеров,осуществляннцих память, схем введения различных коэффициентов, потенциально-импульсных элементов задержки и др.Аппаратурная сложность линейного интегратора, собранного на двоично-десятичных умножителях,содержащего блоки определения декад, декадные счетчики и потенциально-импульсные эле менты памяти отбора, а также большое количество структурных единиц системы значительно усложняет систему ЧПУ и понижает в свою очередь надежность работы СТО.
Цель изобретения - упрощение и повышение надежности системы ЧПУ.
Поставленная цель достигается тем, что в систему введены последовательно соединенные общие блок сравнения, коммутатор и сумматор и по каждой координате управления - делитель частоты, выход которого подключен ко второму входу блока управления, информационный вход - к выходу интегратора, а управляющий вход к выходу общего сумматора, первые и вторые входаа общих блока сравнения и коммутатора соединены со вторым и третьим вьисодами устройства памяти соответственно.
На фиг.1 изображена схема системы ЧПУ;, на фиг.2 - схема делителя частоты; на фиг.З - временная диаграмма работы делителя частоты; на фиг.4 - схема общего блока сравнения на фиг.З --схема коммутатора, на фиг. б - схема сумматора; на фиг.7 и 8 - алгоритм работы системы ЧПУ сто; на фиг. - траектория перемещения рабочего органа СТО.
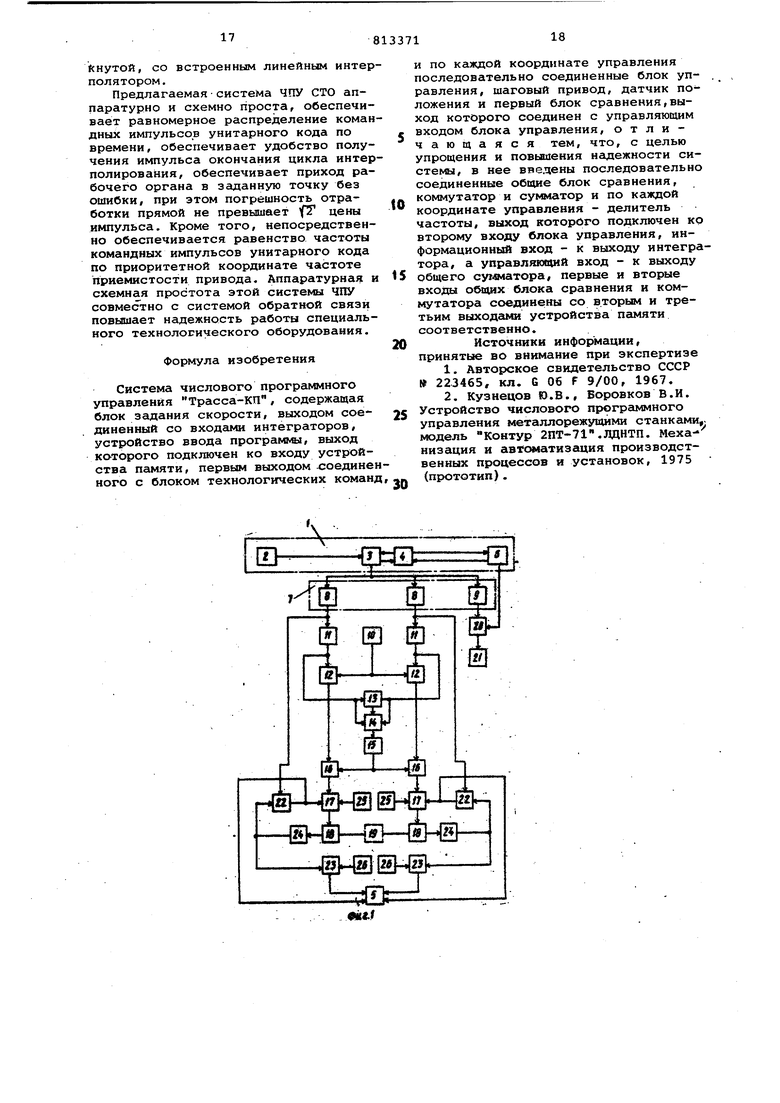
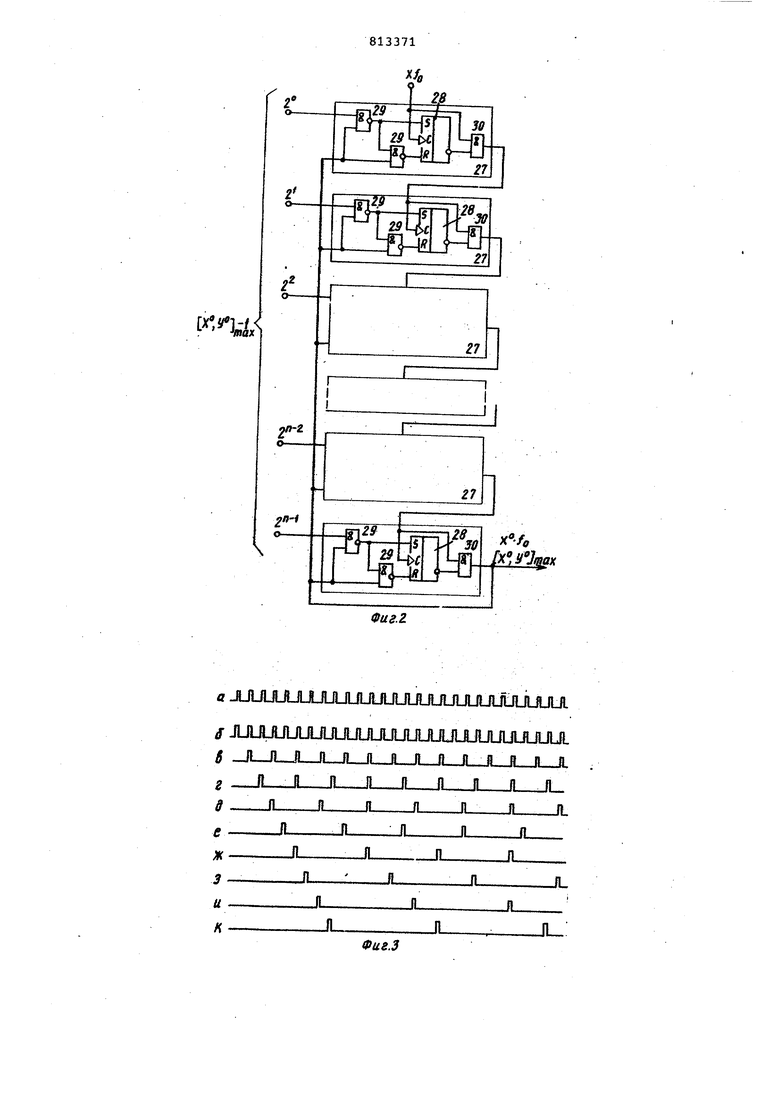
Система ЧПУ СТО включает устройство 1 ввода программы, содержащее программоноситель 2, блок 3 ввода, пульт .4 управления с блоком 5 Цифровой индикации и выносной пульт б управления, устройство 7 памяти, содержащее регистры 8 и 9 рабочей , блок 10 задания скорости, пр бразователи 11 двоично-десятичных кодов, интеграторы 12 по каждой координате, общие блок 13 сравнения, коммутатор 14 и сумматор 15, делители 16 частоты импульсов унитарных кодов интеграторов 12, блоки 17 управления перемещений по осям х и у, привода 1Е( перемещения рабочего органа 19 с шаговым электродвигателем, блок 20 тег нологических команд, ис полнительные элементы 21 СТО, вычитающие 22 и реверсивные 23 двои 1НОдесятичные счетчики, блоки питания (на фиг. не показан А а также фотоэлектрические импульсные датчики 24 обратной связи, установленные на валах шаговых электродвигателей приводов 18, и контактирующие с рабочим органом 19 датчики 25 исходного положения . и датчики 26 положения абсолютного начала координат, установ ленные на станине СТО на пути перемещения рабочего органа 19/ Делитель 16 импульсов унитарного кода интегратора 12 содержит (фиг.2) счетчикделитель частоты входных импульсов, включающий п ступеней 27 деления, причем выход т-ной ступени 27 подключен к первому входу .m+1-бй ступени 27 деления. Вторые информационные входы каждой ступени 27подключены к соответствующим первым входам делителя 16 частоты. Третий установочный вход каждой .ступени 27 подключен к выходу п-ой ступени 27, а первый счетный вход первой ступени 27 и выход последней ступени 27 подключены ко второму входу и к выходу делителя 16 частоты соответственно.При этом каждая ступень 27 счетчика-делителя 16 частоты включает триггер 2 два двухвходных элемента И-НЕ 29 и двухвходной элемент И 30.
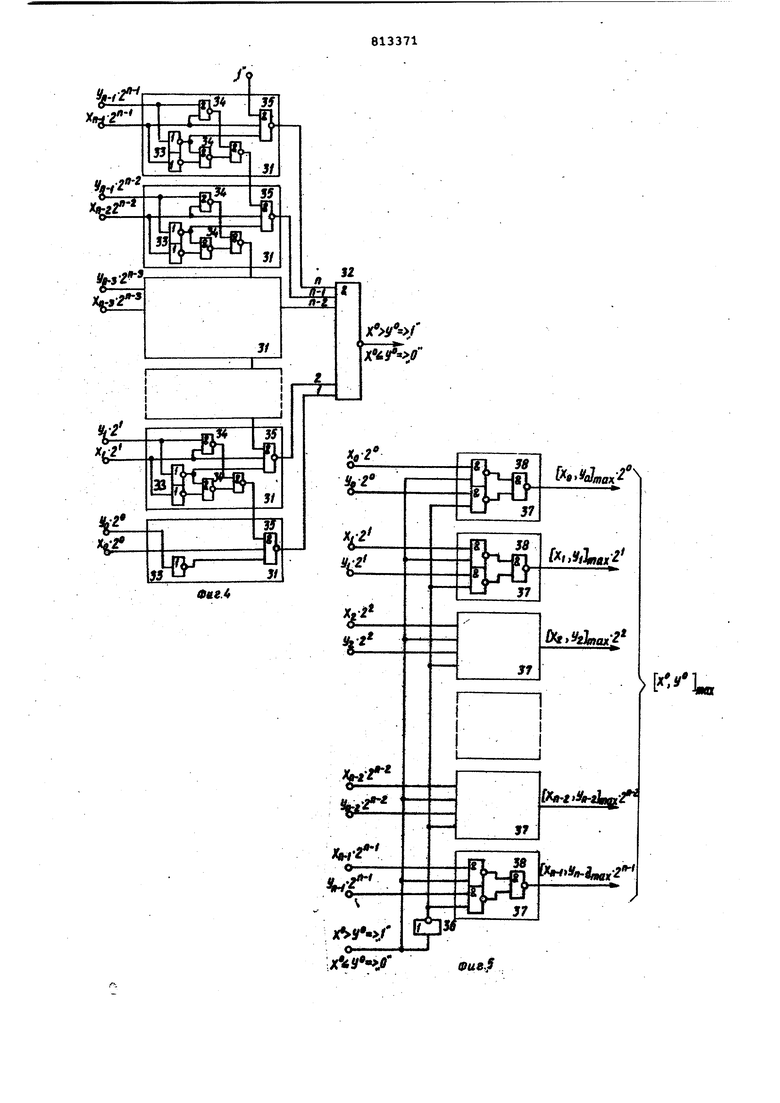
Блок 13 сравнения содержит (фиг.4 п блоков 31 равнозначности и п-входной элемент И-НЕ 32, причем первый и второй входы каждого блока 31 равнозначности подключены к соответствующим входам блока 13 сравнения, третий вход т-ого блока 31 подк.лючен к ,первому выходу m-1-oro блока 31 равнозначности, вторые выходы блоков 31 гЮдключены к входам элемента И-НЕ 32 выход которого подключен к выходу блока 13 сравнения. К третьему входу последнего п блока 31 равнозначности постоянно подключена логическая 1. При этом каждый блок 31 равнозначности, кроме первого, содержит два элемента НЕ 33, три элемента И-НЕ 34 и элемент И-НЕ 35.
Коммутатор 14 содержит (фиг.5) элемент НЕ 36 и п блоков 37 переключений, причем первый и второй входы каждого блока 37 подключены к соответствующим входам коммутатора 14, третий вход - непосредственно, а четвёртый вход - через элемент НЕ
36- к третьему входу коммутатора 14 Выход каждого блока 37 переключения подключен к соответствующим выходам коммутатора 14. При этом каждый блок
37переключений включает три элемента И-НЕ 38.
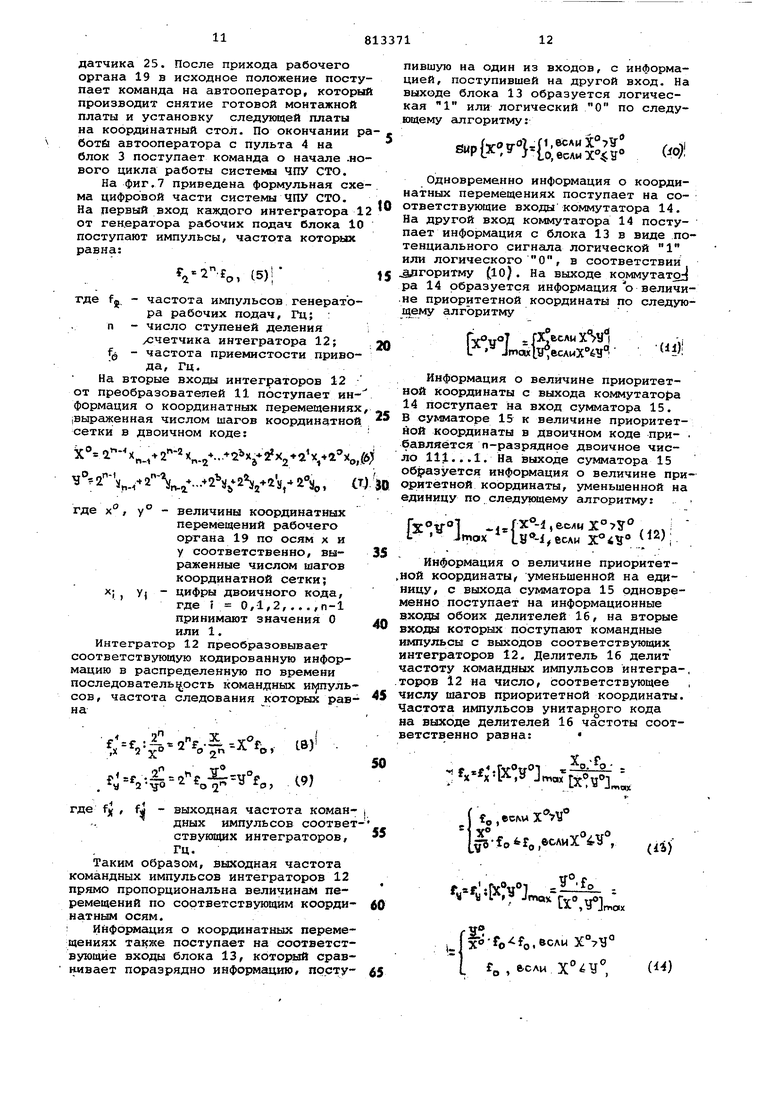
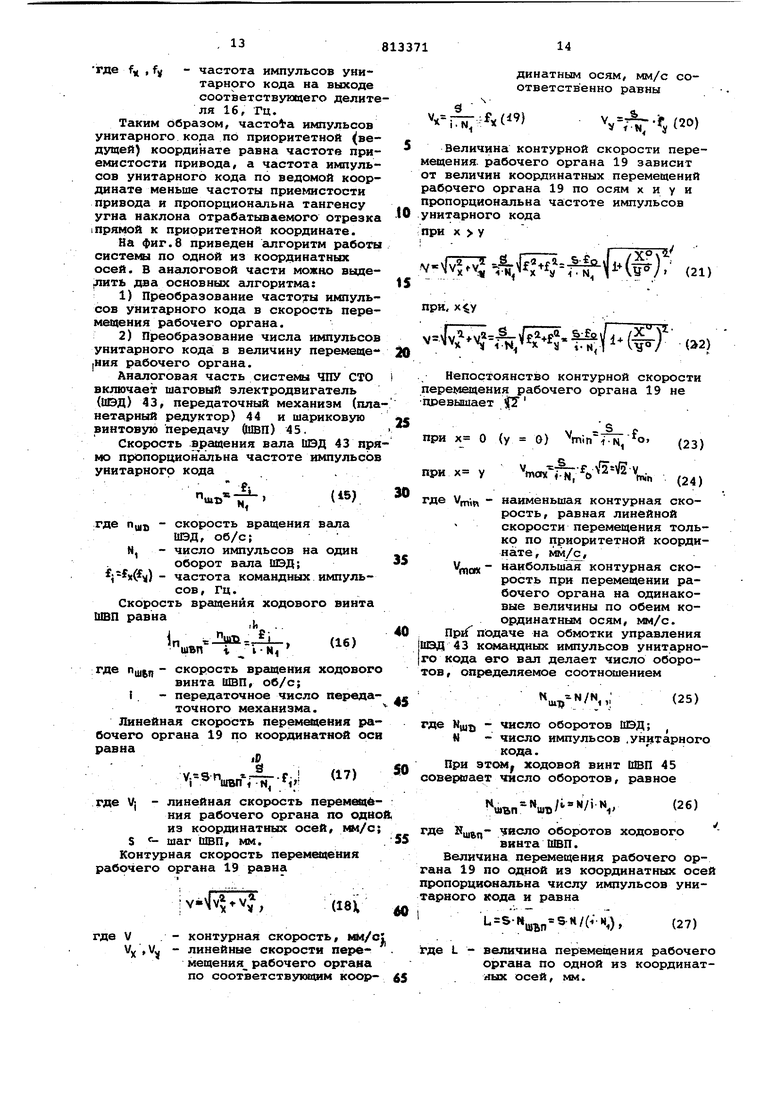
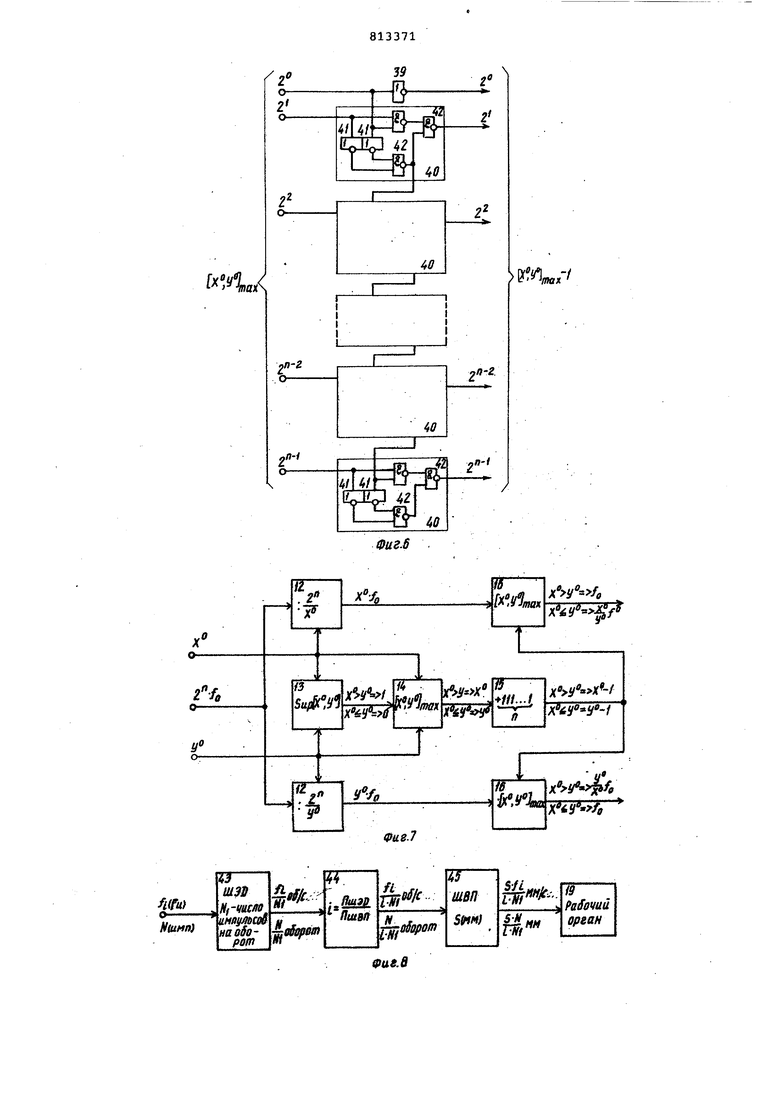
Сумматор 15 содержит (фиг.6) элемент НЕ 39 и п-1 блоков 40 сложения, причем вход элемента НЕ 39 и первый вход каждопо блока 40 подключены к соответс1гвукяцим входам сумматора 15. Первый выход.- т-ого блока 40 соединен со вторым входом m+1-oro блока 40 сложения, а второй вход первого блока 40 подключен к входу элемента НЕ 39, выход которого и вторые выходы блока 40 подключены к соответствукицим выходам сумматора 15. При это каждый блок 40 сложения включает по два элемента НЕ 41 и по три двухвходных элемента И-НЕ 42. , Предлагаемая система ЧПУ предназ начена для задания перемещений рабочему органу 19 СТО (координатному столу, на котором закреплена монтажная плата) относительно головки сварочного автомата СТО. Траектория дви жения рабочего органа 19 - прямой от резок, соединяющий две контактные токопроводящие площадки монтажной платы. Координаты контактных площадок различных плат заранее предопределены. В отличие от известных систем, величины координатных перемеще ний рабочего органа по осям X и У задают в каждом кадре программы не ЧИСЛОМ импульсов, определяемых в со ответствии с ценой импульса, а числом шагов координатной прямоугольной сетки. В предлагаемой системе ЧПУ СТО программа работы записывает ся на Программоносителе 2 двоичнодесятичным кодом в виде отдельных кадров. В кадре программы величины координатных перемещений задают чис лом шагов координатной сетки, опред ляемых в соответствии с размером ша га координатной сетки по формулам: где х°, величины координатных перемещений рабочего органа 19 по осям хну соответственно, выраженные число шагов координатной сетки; X,у - величины координатных перемещений рабочего органа 19 по осям хну соответственно, мм; Q - шаг прямоугольной координатной сетки, мм. Блок 3 осуществляет последовател ное считывание с программоносителя каждого кадра программы кодированно информации о перемещениях рабочего органа 19, усиливает и формирует фотосигналы, считанные фотосчитывателем, и направляет их в соответств ющие запоминакнцие элементы регистров 8 рабочей памяти Перемещение п оси х и Перемещение по оси у , проверяет правильность составления и правильность считывания кадра, ко тролирует правильность ввода информации. С выхода регистров 8 информа ции в двоично-десятичном коде посту пает непосредственно на информацион ные входы вычитающих счетчиков 22. В счетчиках 22 производится запись информации о перемещениях рабочего органа 19 по соответствующим координатным Осям. Одновременно с выходов регистров 8 информация о координатных перемещениях поступает в преобразователи 11. Преобразованная информация в двоичном коде поступает на соответствующие интеграторы 12. На ругой вход каждого интегратора 12 поступаиот импульсы от одного и того же генератора рабочих подач блока 10. Интегратор 12 преобразует соответствующую кодированную информацию, выраженную числом шагов координатной сетки в двоичном коде, в распределенную по времени последовательность командных импульсов. При этом частота их следования (по каждой координате) пропорциональна величинам перемещений по соответствующим координатным осям. Преобразованная информация с выхода преобразователей 11 кода также поступает на первый и второй входы блока 13. Блок 13 сравнивает информацию, поступившую на первый вход, с информацией, поступившей на второй вход, следующим образом (фиг.4). На первый и второй входы каждого блока 31 равнозначности подаются логичес: кие О или.Ч в соответствии со значениями двоичных чисел, выражающих перемещение рабочего органа 19 по осям X и у числом шагов координатной сетки. Сравнение чисел осуществляется поразрядно, начиная со старшего п-го разряда Если х 1 и Уп, О, то с выхода элемента И-НЕ 35 п-ого блока 31 равнозначности на вход элемента И-НЕ 32 поступает логический О. В этом случае на выходе блока 13 появляется логическая . В противном случае, при x.f,yf , с выхода элемента И-НЕ 35 п-ого блока 31 равнозначности на вход элемента И-НЕ 32 и на третий вход п-1-ого блока 31 равнозначности поступает логическая 1. Б n-1-OM блоке 31 равнозначности сравнивается n-l-ый разряд двоичных чисел таким же образом. Аналогично сравниваются последуницие разряды двоичных чисел В результате на выходе блока 13 при большем числе шагов перемещения по оси х появляется логическая 1, а в противном случае - логический О. Преобразованная информация о перемещениях органа 19 с выхода преобразователей 11 поступает на первый и второй-входы коммутатора 14,. на выходе которого, образуется информация о перемещении но приоритетной координате следующим образом (фиг.5). На первый и второй входы блока 37 подаются логические О или 1 в соответствии со значениями двоичных чисел, выражающих перемещение по осям X и у числом шагов координатной сеткл, а на третий и четвертый входы каждого блока 37 подаются логические О или 1 с выхода блока 13 в зависимости от величин перемещений рабочего органа 19 по осям х и у. Если число шагов перемещений по оси X больше числа шагов перемещений по оси у , т.е. если , то с выхода блока 13 на третий вход каждого блока 37 поступает логическая 1, а на четвертый вход логический О. В этом случае на выходеПког мутатора 14 записывается число в двоичном коде, соответствующее перемещению рабочего органа 19 по оси X. В противном случае, т.е. если , то с выхода блока 13 на третий вход каждого блока 37 пост;упает логический О, а на четвертый вход логическая 1. В этом случае на выходе коммутатора 14 записывается чис ло в двоичном коде, соответствующее перемещению рабочего органа 19 по оси у . Таким образом, на выходе коммутатора 14 всегда образуется информация о перемещении рабочего орга на 19 по приоритетной координате, С выхода коммутатора 14 информация кода приоритетной координаты поступает на вход сумматора 15, который прибавляет к двоичному коду п разрядное двоичное число 111...11 следующим образом (фиг.б). К каждому разряду прибавляют единицу и единицу переноса, если она возникает при прибавлении единицы к младшему разряду. Это обеспечивается для первого разряда элементом НЕ 39, а для следующих разрядов - блоками 40 сложений . С выхода сумматора 15 информация выраженная числом шагов координатной сетки наибольшего координатного перемещения, уменьшенная на единицу в двоичном коде, поступает на первые информационные входы делителя 16 час тоты, на вторые управляющие входы которых поступают от соответствующих интеграторов 12, распределенные по времени пocлe JOвaтeльнocти командных импульсов, частота которых пропорциональна величинам перемещений по соответствующим координатным осям. Делитель 16 делит частоту командных импульсов, поступающих с интеграторов 12 на число, которое подано с выхода сумматора 15 следующим образом (фиг. 2). Элемент И 30 каждой ступени 27 деления обеспечивает подсче,у входных импульсов в обратном порядке. Когда очередной входной командный импульс на втором входе делителя 16 должен перевести его из состояния 000...О в состояние 111.. выходной импульс с последней ступени 27 деления поступает на третий вход каждой ступени 27 деления и вновь устанавливает делитель 16 в состояние, соответствующее информации, поступающей на первые входы делителя 16 частоты. При этом коэффициент ;еления составляет значение, которое на единицу больше числа, поступающего на первые входы делителя 16.Триггер 28 каждой ступени 27 деления обеспечивает деление частоты командных импульсов на два, а элементы И-НЕ 29 обеспечивают запись в делитель 16 информации, поступающей на его первые входы. В результате многократного деления частоты импульсов, поступающих с выхода интегратора 12, которые распределены по времени неравномерно, на выходе Делителя 16 неравномерность частоты импульсов ничтожно мала и не обнаруживается при перемещениях рабочего органа 19. На фиг.З приведены временные диаграммы работы делителя 16. На диаграмме а показаны входные импульсы, поступающие с выхода интегратора 12. Частота импульсов условно показана равномерной. На диаграммах б,в,...к в качестве примера показаны импульсы, выделенные на выходе делителя 16 при подаче логической 1 на первые входы делителя 16 соответствующим значимым разрядом чисел 1, 2 , 3 . . .,9 в двоичном коде соответственно. В результате деления частоты командных импульсов с выхода делителя 16 частоты по приоритетной координате на вход соответствующего блока 17 управления приводом перемещения рабочего органа 19 поступают импульсы унитарного кода, частота которых рав- на частоте приемистости шагового электродвигателя, не зависящая от величины перемещения,по приоритетной координате, А в результате деления частоты командных импульсов с входа делителя 16 по другой координате на вход блока 17 перемещения рабочего органа 19 поступают импульсы, частота которых меньше частоты приемистости шагового электродвигателя во столько раз, во сколько величина перемещения по ведущей координате больше величины перемещения по ведомой координате, т.е. пропорциональна тангенсу угла наклона отрабатываемого отрезка прямой к приоритетной координате. Таким образом, на вход блоков 17 поступают равномерно распределенные по времени командные имгГульсы, частоты которых связаны соотношением: ik.,/«4 f уО у « где fy ,fJ -.частота импульсов соот. ветствующих унитарных кодов, Гц. Причем, частота импульсов унитарного кода по приоритетной координате равна частоте приемистости привода, т.е. то f.( fви , (3) если X у -- (4) fy foИ fy f, если f0 - частота приемистостис привода, Гц. Блок 17 осуществляет формирование и усиление управляющих сигналов, пре назначенных для исполнительных т-фаз ных шаговых электродвигателей, работающих по 2т-тактной системе коммутации фаз. Управляющие сигналы с выхода блока 17 поступают на приводы 18. Вращение вала шагового электродвигателя посредством передаточного механизма (планетарного редуктора) и шариковой винтовой передачи преобразуется в поступательное перемещени рабочего органа 19 по каждой координатной оси. После перемещения рабочего органа 19 по одной из координатных- осей на величину, равную одному шагу координатной сетки, с выхода датчика 24 на счетный вход соответствующего счетчика 22 поступает импульс, который уменьшает записанную в нем ранее информацию на единицу. При отработке рабочим органом 19 заданного перемещения счетчик 22 обнуляется. Одновременно с этим с выхода счетчика 22 на блок 17 поступает сигнал, запрещающий вход импульсов унитарного кода с выхода делителя 16. Таким образом, обеспечивается приход рабочего органа 19 в заданную без ошибки с точностью шага квантования/т.е величины перемещения, соответствующей одному импульсу. С выхода счетчика 22 информация о перемещениях рабочего органа 19, вырсшсенная числом шагов координатной сетки в двоично-десятичном коде, в относительной системе отсчета по соответствующей координатной оси поступает на первый вход блока 5 пульта 4. С выхода датчика 24 на счетный вход соответствующего счетчика 23 также поступают командные импульсы после перемещения рабочего органа 19 по данной координатной.оси на величи ну, равную одному шагу координатной сетки. Если орган 19 перемещается в направлении, совпадающем с положител ным направлением координатной оси, то ранее записанная в счетчике 23 информация увеличивается. При проти воположном нап| авлении перемещения уменьшается. Причем счет импульсов счетчик 23 начинает только по коман де с датчика 26 после прохождения рабочим органом 19 абсолютного на.Чошо координат по данной оси. С вы;хода счетчика 23 информсщия о rtepe:мещениях органа 19, выраженная числом шагов координатной сетки в двоично-десятичном коде в абсолютной системе отсчета, по соответствуювдей координатной оси поступает на второ вхол блока 5 пульта 4. Запись команды в кадре технологи ческого процесса управляющей програ мы на программоносителе 2 осуществл ется в виде символа названия) адреса и номера команды. Считанная с программ, моносителя 2 блоком 3 команда технологического процесса записывается в регистры 9. После отработки органом 19 перемещений по осям х или у на величины, записанные в данном кадре, программоносителя 2 с пульта 4 в блок 20 поступает команда на выполнение технологических команд. Информация о командах технологическо-го процесса с выхода регистров 9 поступает на соответствующие входы блока 20. Маломощные сигналы регистров 9 усипиваются в блоке 20 и поступают непосредственно на исполнительные элементы: промежуточные реле, пускатели и т.п. Контакты исполнительных элементов включают требуемые по технологическому процессу исполнительные механизмы, аппараты, устройства и т.п. - электромагнитные муфты, электродвигатели, ультразвуковой сварочный генератор и пр. Технологические команды систеглл ЧПУ, подаваемые в цепи управления цикловой автоматикой СТО, выполняют следующие функции: поворот головки сварочного аппарата в направлении уклгщки объемного монтажного проводника ; подачу конца объемного монтажного проводника в рабочую зону головки сварочного аппарата, подвод и отвод головки сварочного аппарата от контактных площадок монтажной платы j; включение и выключение ультра-звукового сварочного генератораJ отрезку объемного монтажного проводника, после приварки второго конца проводника; снятие монтажной платы после окончания объемного монтажа проводников и установку следующей монтг1Жной платы на координатный стол. Во время выполнения технологических команд с пульта 4 поступает команда на блок 3 на считывание следующего кадра программы кодирования информации о перемещениях рабочего органа 19. После выполнения всех технологических команд с пульта 4 поступает команда в блок 17 на отработку считанной с программоносителя 2 командаа. Одновременно в блок 3 с пульта 4 поступает ксяланда. на считыва;ние следующего кадра программы кодированной информации о командах технологического процесса. Автоматический цикл работы системы ЧПУ повторяется. После окончания объемного монтажа в блок 17 поступает считанная с прогрс1ммоносителя 2 команда о перемещении органа 19 в исходное положение. П1Ж достижении органом 19 исходного положения по одной из координатных осей срабатывает соответствующий датчик 25 и подает командный импульс Стоп на вход соответствующего блока 17. По другой координатной оси рабочий орган 19 перемещается до срабатывания датчика 25. После прихода рабочего органа 19 в исходное положение пост пает команда на автооператор, котор производит снятие готовой монтёикной платы и установку следующей платы на координатный стол. По окончании ботй автооператора с пульта 4 на блок 3 поступает команда о начале .н вого цикла работы система ЧПУ СТО. На фиг.7 приведена формульная сх ма цифровой части системы ЧПУ СТО. На первый вход каждого интегратора от генератора рабочих подач блока 1 поступают импульсы, частота которых равна: ,, (5) где f -частота импульсов генерато ра рабочих подач, Гц; : -число ступеней деления хзчетчика интегратора 12; -частота приемистости приво да, Гц. На вторые входы интеграторов 12 от преобразователей 11 поступает ин формация о координатных перемещения (Выраженная числом шагов координатно сетки в двоичном коде: °- ,. «п-г - °. ., ,...+2,,-2%+2(/ i. у - величины координатных перемещений рабочего органа 19 по осям х и у соответственно, выраженные числом шагов координатной сетки; у - цифры двоичного кода, где i 0,1,2,...,п-1 принимают значения О или 1. Интегратор 12 преобразовывает соответствующую кодированную информацию в распределенную по времени последователы.ость командных сов, частота следования которых рав на- ., о 2 - fl.f .f r y S-Tjo о Чгде fj| , fj - выходная частота командных импульсов соответ ствующих интеграторов, Гц. Таким образом, выходная частота командных импульсов интеграторов 12 прямо пропорциональна величинам перемещений по соответствующим координатным осям. : Информация о координатных перемещениях также поступает на соответствующие вхо}щ блока 13, который сравнивает поразрядно информацию, поступившую на один из входов, с информацией, поступившей на другой вход. На выходе блока 13 образуется логическая 1 или логический О по следуницему алгоритму: йи„1уОп-о.р,есАмХ°79 f 1 . J - to, если Х° ° °/ Одновременно информация о координатных перемещениях поступает на соответствующие входы коммутатора 14. На другой вход коммутатора 14 поступает информация с блока 13 в виде потенциального сигнала логической 1 или логического О, в соответствии алгоритму (lOj. На выходе коммутатор ра 14 образуется информация Ъ величи.не приоритетной координаты по следующему алгоритму ( f./v F- Jma«ly ecAMX6V : Информация о величине приоритетной координаты с выхода коммутато за 14 поступает на вход сумматора 15. В сумматоре 15 к величине приоритетной координаты в двоичном коде при- . бавляётся п-разрядное двоичное число 111...1. На выходе сумматора 15 образуется информация о величине приоритетной координаты, уменьшенной на единицу по следующему алгоритму: fVotro-j .1,(,ес/1мХ°7У°..„. i 1 Jmox ,ecAH X°iV° j. Информация о величине приоритетной координаты уменьшенной на единицу, с выхода сумматора 15 одновременно поступает на информационные входы обоих делителей 16, на вторые входы которых поступают командные импульсы с выходов соответствующих интеграторов 12. Делитель 16 делит частоту командных импульсов йнтегра-, торов 12 на число, соответствующее числу шагов приоритетной координаты. Частота импульсов унитарного кода на выходе делителей 16 частоты соответственно равна: , . tx yj« f.ecNMX y ., Ч JmQ4 цол L. , у Ji .ecAu X°7-g o, ftcAM , где f , f - частота импульсов унитарного кода на выходе соответствующего делите ля 16, Гц. Таким образом, частота импульсов унитарного кода по приоритетной ведущей) координате равна частоте приемистости привода, а частота импульсов унитарного кода по ведомой координате меньше частоты пpиe шcтocти привода и пропорциональна тангенсу угна наклона отрабатываемого отрезка Iпрямой к приоритетной координате. На фиг.8 приведен алгоритм работы системы по одной из координатных осей, в аналоговой части можно выде,лить два основных алгоритма; 1)Преобразование частоты импульсов унитарного кода в скорость перемещения рабочего органа. 2)Преобразование числа импульсов унитарного кода: в величину перемеще |Ния рабочего органа. Ансшоговая часть системы ЧПУ СТО включает шаговый электродвигатель (шэд) 43, передаточный механизм (пла нетдрный редуктор) 44 и шариковую винтовую передачу ОИВП) 45. Скорость аргалеакя вала ШЭД 43 пря мо пропорциональна частоте импульсов унитарного кода. , (iS/ . V где Пщд - скорость вращения вала ШЭД, об/cf N, - число импульсов на один оборот вала ШЭД; (f) - частота командных импульсов, Гц. Скорость вращения ходового винта ШВП равна швп - /Г-м7 где - скорость вращения ходового винта ШВП, об/с; I - передаточное число передаточного механизма. Линейная скорость перемещения рабочего органа 19 по координатной оси равна V u«rfni:;f,fi где Vj - линейная скорость перемещения рабочего органа по одво из координатных осей, мм/с S шаг ШВП, мм. Контурная скорость перемещения рабочего органа 19 равна контурная скорость, мм/о линейные скорости перемещения рабочего органа по соответствующим координатным осям, мм/с соответственно равны ) Vnr(9) Величина контурной скорости перемещения, рабочего органа 19 зависит от величин координатных перемещений рабочего органа 19 по осям х и у и пропорциональна частоте импульсов унитарного кода при X у (21) при, ,() (щ Непостоянство контурной скорости перемещения рабочего органа 19 не превышает V - - f при х О (у 0) min -N, О при х у v.-.f.AaVSv. mofx -N, о где Vfnit - наименьшая контурная скорость, равная линейной скорости перемещения только по приоритетной координате, мм/с, Чпох наибольшая контурная скорость при перемещении рабочего органа на одинаковые величины по обеим координатным осям, мм/с. npiT подаче на обмотки управления ШЭД 4 3 командных импульсов унитарного кода его вал делает число оборотов, сяхределяемое соотношением ,,; где Мц, - число оборотов ШЭД; , N - число импульсов ,уни1тарного При эт(М4| ходовой винт ШВП 45 совершает число оборотов, равное швп ш / где число оборотов ходового винта ШВП. Величина перемещения рабочего органа 19 по одной из координатных осей пропорциональна числу импульсов унитарного кода и равна 1- -«ШЪП 5 / -) где L - величина перемещения рабочего органа по одной из координатных осей, мм.
Таким образом, аналоговая часть системы ЧПУ СТО преобразует цифровую информацию - частоту и количество импульсов унитарного кода, соответственно, в скорость и величину перемещения рабочего органа 19. Причем, скорость перемещения рабочего органа 19 пропорциональна частоте импульсрв унитарного кода, а величина перемещения - количеству импульсов унитарного кода.
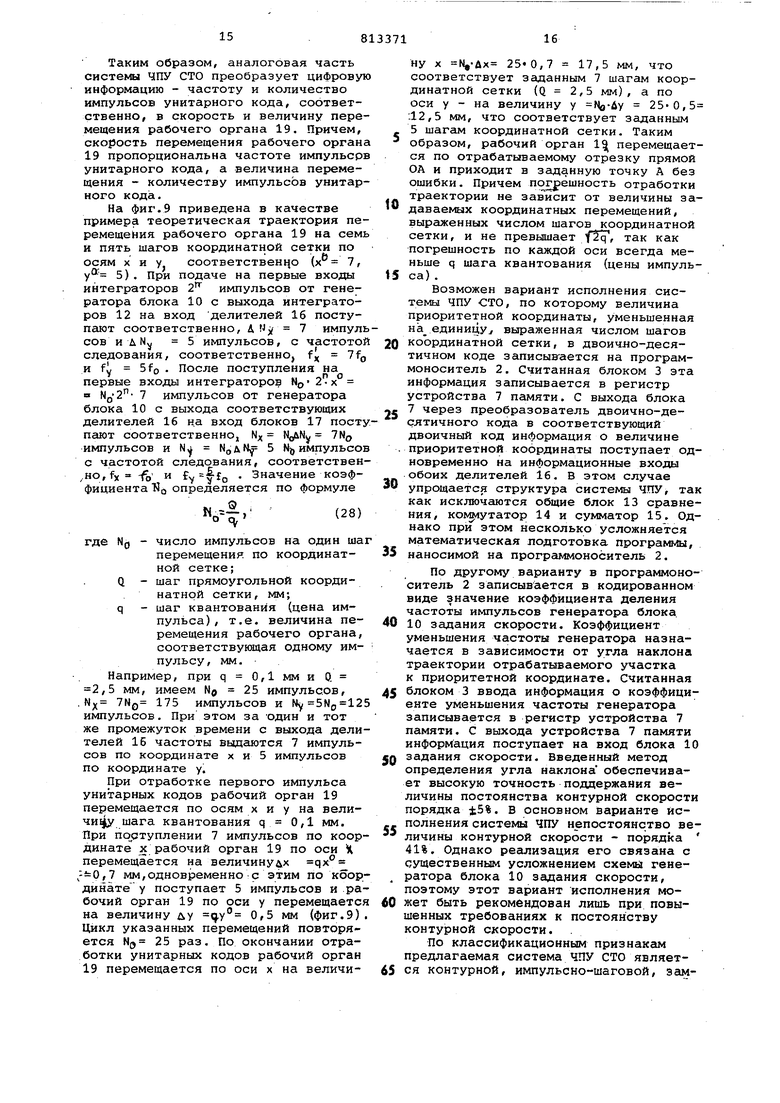
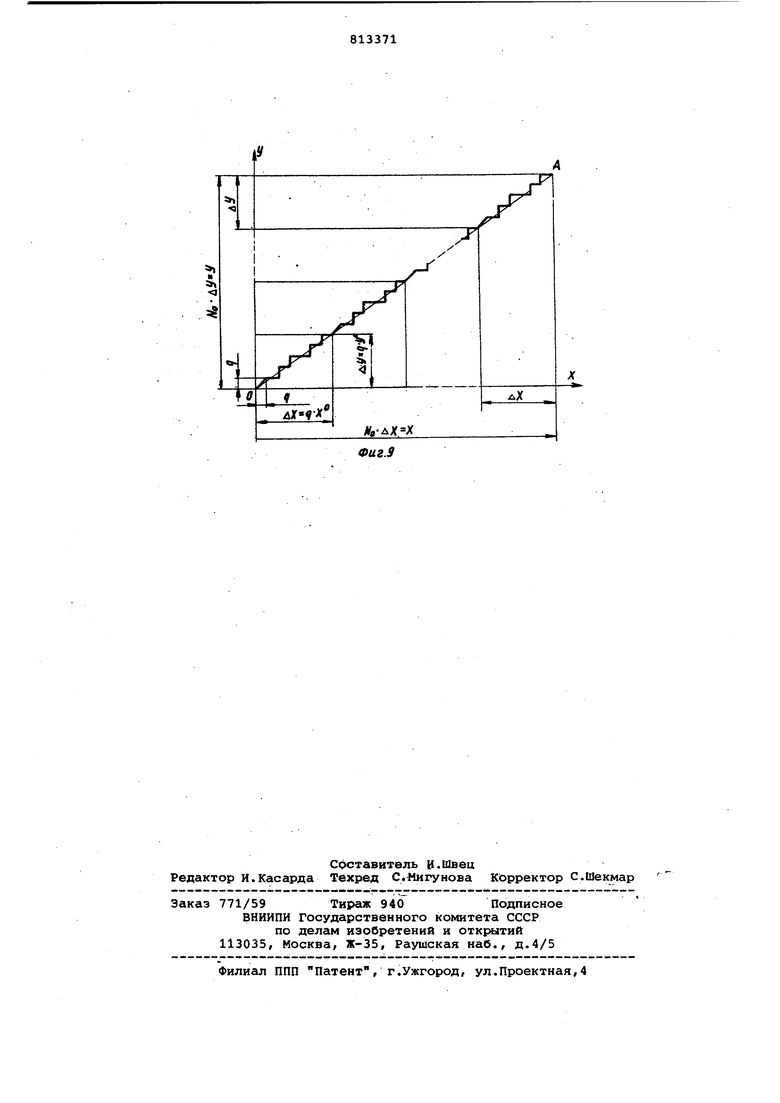
На фиг.9 приведена в качестве примера теоретическая траектория перемещения рабочего органа 19 на семь и пять шагов координатной сетки по осям X и у соответственно (х 7, у 5) . При подаче на первые входы интеграторов 2 импульсов от генератора блока 10 с выхода интеграторов 12 на вход делителей 16 поступают соответственно, Л Nj 7 импуль 5 импульсов, с частотой сов и л N
7fn
соответственно,
следования,
После поступления на
И I W - Г(5 ..- - -- первые входы интеграторов я 7 импульсов от генератора блока 10 с выхода соответствующих делителей 16 на вход блоков 17 поступают соответственно, N;, NouNy 7N, импульсов и N No&Ny 5 М„ импульсов с частотой следования, соответствен.Ho,, и Значение коэффициента NO определяется по формуле
Я - ®.
V(28)
где NO - число импульсов на один шаг перемещения по координатной сетке;
Q - шаг прямоугольной координатной сетки, мм; q - шаг квантования (цена импульса) , т.е. величина перемещения рабочего органа, соответствующая одному импульсу, мм.
Например, при q 0,1мми 0. 2,5 мм, имеем N 25 импульсов, . Мд 7М0 175 импульсов и импульсов. При этом за один и тот же промежуток времени с выхода делителей 16 частоты выдаются 7 импульсов по координате х и 5 импульсов по координате у.
При отработке первого импульса унитарных кодов рабочий орган 19 перемещается по осям х и у на величи шага квантования q 0,1 мм. При портуплении 7 импульсов по координате X рабочий орган 19 по оси Ч перемещается на величинудх qx --0,7 мм,одновременно с этим по координате у поступает 5 импульсов и рабочий орган 19 по оси у перемещается на величину лу «j.y 0,5 мм (фиг.9) . Цикл указанных перемещений повторяется N(j 25 раз. По окончании отработки унитарных кодов рабочий орган 19 перемещается по оси х на величину X N,-ux 25«0,7 17,5 мм, что соответствует заданным 7 шагам координатной сетки (Q 2,5 мм), а по оси у - на величину у Мо-Ду 25-0,5 -12,5 мм, что соответствует заданным 5 шагам координатной сетки. Таким образом, рабочий орган 1 перемещается по отрабатываемому отрезку прямой ОА и приходит в заданную точку А без ошибки. Причем погрешность отработки траектории не зависит от величины задаваемых координатных перемещений, выраженных числом шагов координатной сетки, и не превышает 0q, так как погрешность по каждой оси всегда меньше q шага квантования (цены импульса) .
Возможен вариант исполнения системы ЧПУ СТО, по которому величина приоритетной координаты, уменьшенная иа единицуу выраженная числом шагов координатной сетки, в двоично-десятичном коде записыв-ается на программоноситель 2. Считанная блоком 3 эта информация записывается в регистр устройства 7 памяти. С выхода блока 7 через преобразователь двоично-деСятичного кода в соответствующий двоичный код информация о величине приоритетной координаты поступает одновременно на информационные входы обоих делителей 16. В этом случае упрощается структура системы ЧПУ, та как исключаются общие блок 13 сравнения , колсяутатор 14 и сумматор 15, Однако при этом несколько усложняется математическая лодготовка программы, наносимой на программоноситель 2.
По другому варианту в программоноситель 2 записывается в кодированном виде значение коэффициента деления частоты импульсов генератора блока. 10 задания скорости. Коэффициент уменьшения частоты генератора назначается в зависимости от угла наклона траектории отрабатываемого участка к приоритетной координате. Считанная блоком 3 ввода информация о коэффициенте уменьшения частоты генератора записывается в регистр устройства 7 памяти. С выхода устройства 7 памяти информация поступает на вход блока 10 задания скорости. Введенный метод определения угла наклона обеспечивает высокую точность поддержания величины постоянства контурной скорости порядка ±5%. В основном варианте исполнения системы ЧПУ непостоянство величины контурной скорости - порядка 41%. Однако реализация его связана с существенным усложнением схема генератора блока 10 задания скорости, поэтому этот вариант исполнения может быть рекомендован лишь при повышенных требованиях к постоянству контурной скорости.
По классификационным признакгш предлагаемая система ЧПУ СТО является контурной, импульсно-шаговой, Эс1мЛнутой, со встроенным линейным интер полятором. Предлагаемая система ЧПУ СТО аппаратурно и схемно проста, обеспечивает равномерное распределение коман дных импульсо в унитарного кода по времени, обеспечивает удобство получения импульса окончания цикла интер полирования, обеспечивает приход рабочего органа в заданную точку без ошибки, при этом погрешность отработки прямой не превышает f7 цены импульса. Кроме того, непосредственно обеспечивается равенство частоты командных импульсов унитарного кода по приоритетной координате частоте приемистости привода. Аппаратурная схемная простота этой системы ЧПУ совместно с системой обратной связи повышает надежность работы специаль ного технологического оборудования, Формула изобретения Система числового программного управления Трасса-КП, содержащая блок задания скорости, выходом соединенный со входами интеграторов, устройство ввода программа, выход которого подключен ко входу устройства памяти, первым выходом х:оедине ного с блоком технологических коман и по каждой координате управления последовательно соединенные блок управления, шаговый привод, датчик положения и первый блок сравнения,выход которого соединен с управляющим входом блока управления, отличающаяся тем, что, с целью упрощения и повьваения надежности системы, в нее введены последовательно соединенные общие блок сравнения, коммутатор и сумматор и по каждой координате управления - делитель частоты, выход которого подключен ко второму входу блока управления, информационный вход - к выходу интегратора, а управляющий вход - к выходу общего суглматора, первые и вторые входы оадих блока сравнения и коммутатора соединены со вторым и третьим выходами устройства памяти соответственно. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 223465, кл. G 06 F 9/00, 1967. 2.Кузнецов Ю.В., Боровков В.И. Устройство числового программного управления металлорежущими станками,модель Контур 2ПТ-71.ЛДНТП. Механизация и ав оматизгщия производственных процессов и установок, 1975 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Линейный интерполятор | 1979 |
|
SU819796A1 |
| Устройство контроля для систем программного управления | 1990 |
|
SU1775716A1 |
| Устройство для контроля программ на координатографе | 1983 |
|
SU1149219A1 |
| Система автоматической настройки инструмента на станках с ЧПУ | 1982 |
|
SU1065091A1 |
| Устройство для управления многокоординатным оборудованием | 1987 |
|
SU1427334A1 |
| Устройство для отображенияиНфОРМАции | 1976 |
|
SU798961A1 |
| ИНТЕРПОЛЯТОР | 1970 |
|
SU272415A1 |
| Интерполятор для шагового графопостроителя | 1974 |
|
SU528588A1 |
| Устройство для коррекции эквидистанты | 1979 |
|
SU830309A2 |
в JUUUUUULJULJULJULaJ
JULAlJIJULiJULIUJ
5 (I Я
2 fl fl ПJftfl Ul
a fl я flлЛ--
-Пnлn
JL
)K 3
JL
и к
JL
JL
Jl
Фиг.З
Фиг,/
.-f
Фиг.6
i
5
м,-дх.х
