Изобретение относится к отрасли машиностроения, а именно к подшипникам качения.
Известны конструкции шарикоподшипников .в которых профиль дорожки качения внутреннего кольца очерчен двумя дугами окружности или эллипсом, симметричным относ тельно большей оси. Однако большая чувствительность радиально-упорныХ подшипников к отклонению угла контакта от номинальной величины увеличивает разброс до долговеч- ности и снижает их надежность.
Цель изобретения - повышение долговечности и грузоподъемности шарикоподшипника
Предлагаемый шарикоподшипник отЛ1гчает- ся тем, что профиль дорожки качения внутреннего кольца очерчен кривой четвертого порядка, а профиль кривой дорожки качения определяется уравнениями:
Х созр/-- 1 -гУ 411 VVcos p-sin /
где X и I - координаты кривой;
Э - угол наклона нормали в данной точке кривой к оси симметрии желоба;
Q,tH «С - постоянные, определяемые из радиусов кривизны желоба
OL cos с..- sin л
1Ж
«;
V(cos p-5in2d)
при заданных предельных углах контакта в шарикоподшипнике, исходя из условия сохранения постоянным максимальногоконтактного напряжения
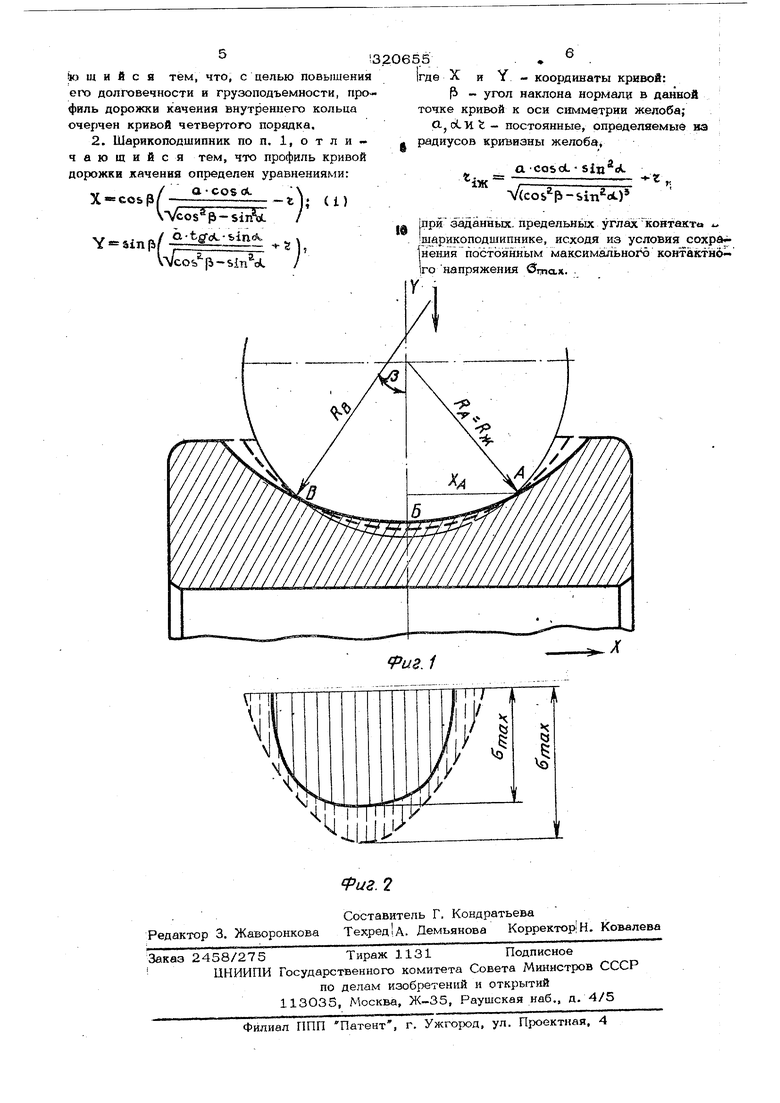
Геометрический смысл постоянных Л , OL и t заключается в следуюшем. Если лилиндр, ось которого находится на некото ром расстоянии от заданной линии в пространстве и наклонена к этой линии под некоторым углом, врашать вокруг этой линии, то поверхность цилиндра будет описывать поверхность вращения, радиальное сечение которой определяется уравнением (1), где % - радиус образующего цилиндра; Л расстояние оси цилиндра от линии врашениа ct угол наклона оси цилиндра к плоскости, перпендикулярной линии вращения. На фиг, 1 изображен профиль желоба внутреннего кольца радиальноп шарикоподшипника предлагаемой (сплошной линией) и н известной конструкции {пунктирной линией) с шариком, вдавленным в поверхность желоба под действием радиальной нагрузки; на фиг, 2 - эпюра контактных напряжений в радиальном сечении желоба для известной и предлагаемой конструкции ша{Яосойодшипника J В описьгоаемой конструкции шарикопод шипника радиус кривизны желоба внутреннего кольца в точке контакта и площадь контакта шарика с желобом являются независимыми величинами. Действительно, из уравнения (1) и соотношении для радиуса кривизны желоба в заданной точке g-cosqi-bin dk V(c08 p-bin dL видно, что параметры , CL j оС. и можно определить, задавшись тремя различными радиусами кривизны R при трех различных углах контакта в шарикоподшипнике или трех различных координатах X или V кри вой, очерчиваюшей профиль желоба. Это свойство предлагаемо IX) профиля желоба, которым не обладает ни один из желобов известных конструкций шарикоподшипников, поз воляет в точке контакта иметь радиус кривизны максимально приближенным к радиусу шариков, а плошадь контакта pei-улировать, , задаваясь радиусами кривизны в двух соседних точках желоба. Таким образом увели чивается грузоподъемность шарикоподшипника без опасности повышения сил трения и теплоБьщелений в шарикоподшипнике. Кроме того, повышение грузоподъемности радиального шарикоподшипника дает возможность воспринимать, помимо радиальных, некоторы осевые нагрузки. Исходя из минимальных контактных напряжений, задаются радиусом в точке Б р кривизны при (фиг, 1), при заданной плошади контакта ша рика с желобом-радиусом кривизны R д в точке А при X X д . Значения R и Хд рекомендуется выбирать равными соответственно радиусу желоба и соответствующей по луосиэллипса контакта, рассчитанными для обычного, очерченного дугой окружности, профиля желоба, а значение R - приближе ным к радиусу шарика. Тогда плошадь контакта шарика с желобом оудет меньше, а ко тактные напряжения по линии контакта в ип сываемой конструкции шариоподш1шника рас пределяется более равномерно (фиг. 2), в р зультате снизятся макси.шЛьные контактны напряжения тах ) задаются р диусом кривизны в тичкс В при заданных у 3 5. грузоподъемности шарикоподшипника и комбинированных нагрузках, которыми бывает нагружен радиальный шарикоподшипник, В случае радиально-упорного шарикоподшипника предлагаемой конструкции, появляется возможность уменьшать чувствительность шарикоподшипника к отклонению угла контакта в нем от номинальной величины. Для Зтого при каждом допустимом крайнем значении угла Р контакта в шарикоподшипнике необходимо задаться радиусами кривизны TfiK, чтобы при всех возможных углах контакта максимальное контактное напряжение б . , которое, как известно, выражается зависимостью1 1 max v x-sin(iVd;; i; i, j сб5фанйлось( постоянным. Если учесть, что kOHTaKTHoe напряжение Q оказывает решающее влияние на долговечность h шарикоподшипника:1А / iQ ь.(. то становится очевидной возможность уменьшить разброс по долговечности и повысить надежность шарикоподшипника. С целью уменьшения сил трения в шарикоподшипнике при минимальном допустимом угле контакта в нем, когда радиус желоба приближен к радиусу шарика, следует задаться определенным радиусом кривизны в третьей точке профиля желоба при f , меньшем максимально допустимого угла контакта в шарикоподшипнике. Решая уравнения (1) и {2), нетрудно определить, что осевые зазоры в радиально-упорном шарикоподшипнике меньше, чем в обычном шарикоподшипнике. Это особенно ценно для радиально-упорных шарикоподшипников с двухтрчечным контактом, которые могут быть нагружены осевыми усилиями в двух противоположных на- правлениях. Причем, выбирая различные параметры кривой, очерчивающей профиль желоба шарикоподшйпника,: осевые зазоры при заданных угле контакта и радиусе кривизнь желоба в точке контакта можно регулировать в нужных пределах и даже сводить их к минимуму, в результате, чего подучается шарикоподшипник с многоточечным контактом, щ и fl с я тем, что, с целью повышен его долговечности и грузоподъемности, пр филь дорожки качения внутреннего кольца очерчен кривой четвертого порядка. 2. Шарикоподшипник по п. 1, о т л и чающийся тем, что профиль криво дорожки качения определен уравнениями: а -cosoL Х соьр XvSos p-sinV Y sinfi/Algg Jlin,, COb ji-Sin ol.
иВ. i 5 и Y - координаты кривой: fi - угол наклона нормали в данной точке кривой к оси симметрии желоба; CljOlKt - постоянные, определяемые иа радиусов кривизны желоба aCosoL- . VCcos p-sin oL) |лрй заданных, предельньщ углах контакта шарикоподшипнике, исходя из условия сохра«|1неш я посто внным максимал1зног6 контактно го напряжения ..