Известны устройства для измерения угла наклона объектов, например, монтажных мачт, в двух взаимно перпендикулярных вертикальных плоскостях, содержащие два маятника, зубчатые -секторы и шестерни.
Предлагаемое устройство позволяет расширить диапазон измеряемых углов, уменьшить габариты и вес по сравнению с известными.
Для этого маятник выполнен из двух идентичных частей, смонтированных попарно на одной оси с возможностью качания в параллельных плоскостях в противоположных направлениях от оси симметрии навстречу друг другу, а груз каждой из частей маятников выполнен в виде зубчатого сектора. Устройство снабжено механизмом дистанционной передачи показаний, который состоит из переменного сопротивления, смонтированного на каждом из валов зубчатых шестерен, и конечных выключателей, установленных на переставных кронштейнах на траектории колебания маятника. Кроме того, устройство имеет интегрируюш,ую приставку, например электроннолучевую трубку.
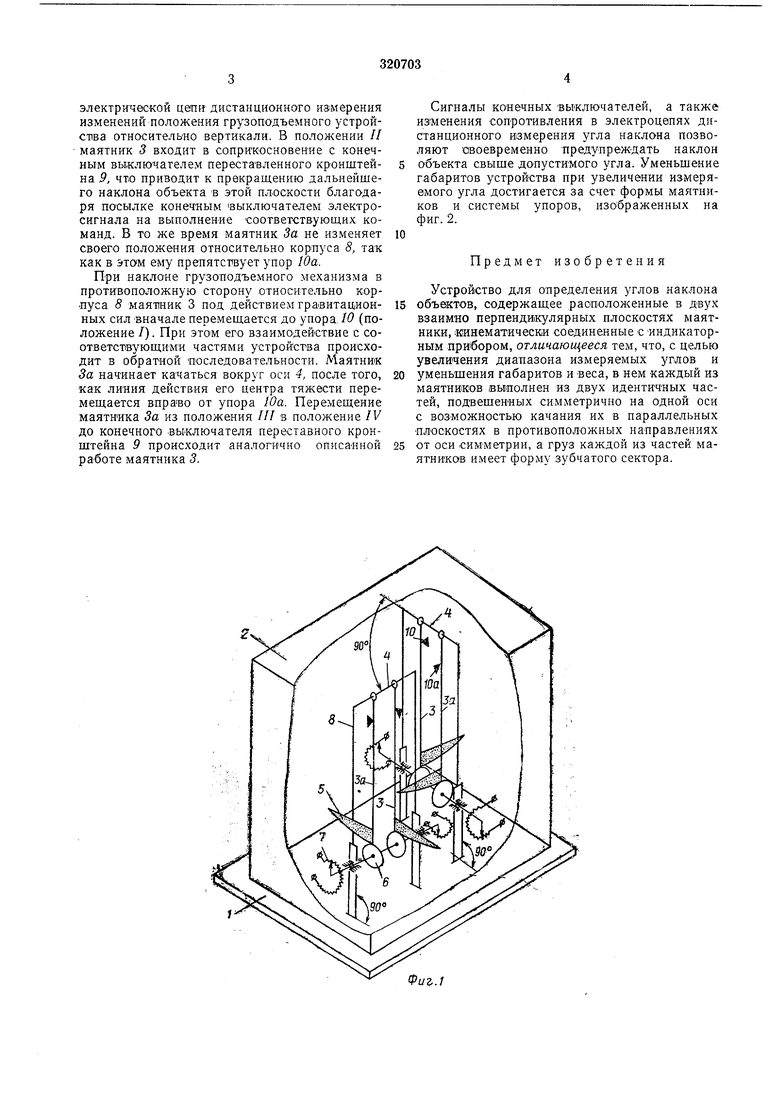
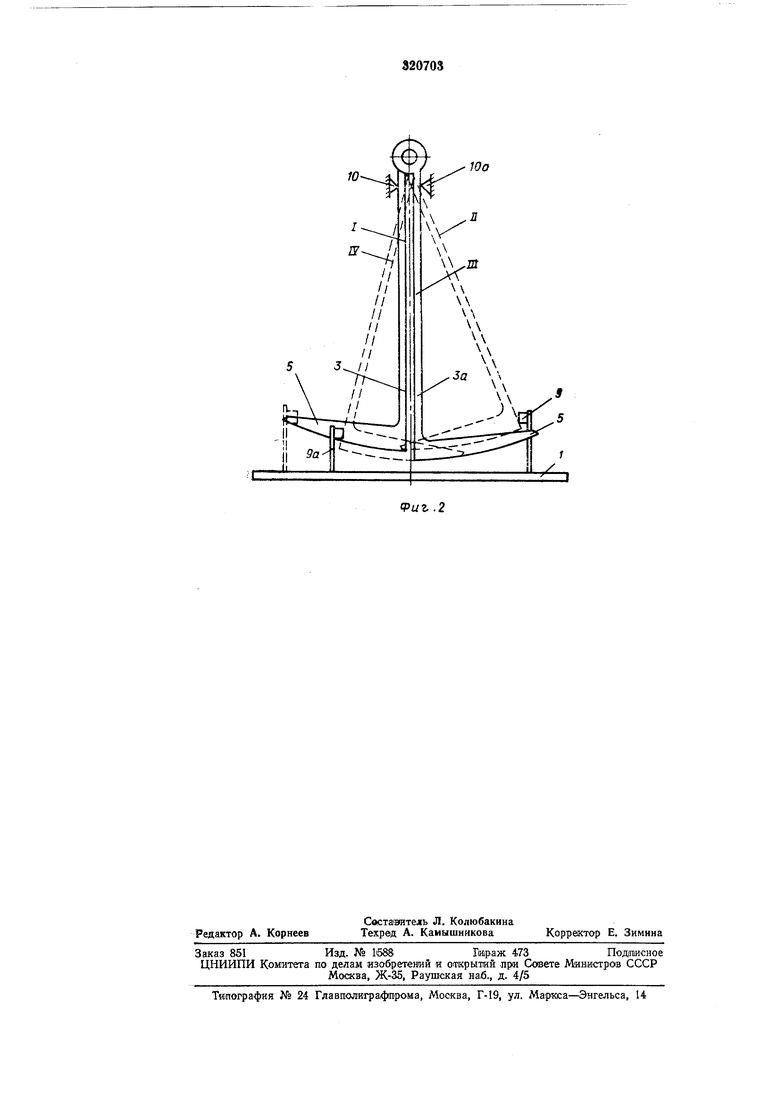
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - схема работы двух маятников, смонтированных на одной оси.
механизм устройства от внешних воздействий, герметично соединен с базовой плитой 1. Внутренний механизм его состоит из двух пар маятников 3 и За, смонтированных на взаимно
перпендикулярных осях 4. Груз маятников 5 и За представляет собой зубчатый сектор 5, находящийся в зацеплении с зубчатой шестерней 6, на валу которой закреплено переменное электрическое сопротивление 7. Подщипники
осей маятников 3 и За и валов шестерен 6 смонтированы в конструкциях кор-пусов 8, которые закреплены на базовой плите L На этой же плите укреплены переставные кронштейны 5 и 9а с конечными выключателями. В конструкции корпусов 8 предусмотрены также упоры 10 и 10а маятникав 3 и За. Устройство работает следующим образом. Перед началом работы устанавливают конечные выключатели на переставных кронштеинах 9 в зависимости от допустимого угла наклона объекта в каждой из взаимно перпендикулярных и параллельных плоскостей качания маятника.
При наклоне базовой плиты 1 происходит
также наклон корпуса 8. При этом маятник , который при совпадении оси симметрии с вертикалью занимал положение /, перемешается в положение //. Зубчатый сектор 5 поворачивает находящуюся с ним в зацеплении шестерню
электрической цепи дистанционного измерения изменений положения грузоподъемного устройспва относительно вертикали. В положении // маятник 5 входит в соприк-основение с конечным выключателем переставленного кронштейна 9, что приводит к прекращению дальнейшего наклона объекта в этой плоскости благодаря посылке конечным выключателем электросигнала на выполнение соответствующих команд. В то же время маятник За не изменяет своего положения относительно корпуса 8, так как в STOiM ему препятствует упор 10а.
При наклоне грузоподъемного механизма в противоположную сторону относительно корпуса 8 маят|ник 3 под действием гравитационных сил Вначале перемещается до упора 10 (положение /). При этом его взаимодействие с соответствующими частями устройства происходит в обратной последовательности. Маятник За начинает качаться вокруг оси 4, после того, как линия действия его центра тяжести перемещается вправо от упора 10а. Перемещение маятника За из положения /Я в положение /V до конечного выключателя переставного кронштейна 9 происходит аналогично описанной работе маятника 3.
Сигналы конечных выключателей, а также изменения сопротивления в электроцепях дистанционного измерения угла наклона позволяют своевременно предупреждать наклон объекта свыще допустимого угла. Уменьшение габаритов устройства при увеличении измеряемого угла достигается за счет формы маятников и системы упоров, изображенных на фиг. 2.
Предмет изобретения
Устройство для определения углов наклона объектов, содержащее расположенные в двух взаимно перпенди1кулярных плоскостях маятники, кинематически соединенные с индикаторным прибором, отличающееся тем, что, с целью увеличения диапазона измеряемых углов и уменьшения габаритов и веса, в нем каждый из маятников выполнен из двух идентичных частей, подвещенных симметрично на одной оси с возможностью качания их в параллельных плоскостях в противоположных направлениях от оси симметрии, а груз каждой из частей маятников имеет форму зубчатого сектора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ВОСПРОИЗВОДСТВА ЦЕЛОГО ЧИС-ПА | 1970 |
|
SU284189A1 |
| Устройство для стабилизации положения кузова транспортного средства | 1979 |
|
SU1111679A3 |
| РЕГУЛЯТОР СКОРОСТИ ОПЛАВЛЕНИЯ ДЛЯ МАШИН КОНТАКТНОЙ СТЫКОВОЙ СВАРКИ | 1967 |
|
SU192309A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ УГЛОВ УСТАНОВКИ КОЛЕС ПЕРЕДНЕЙ ПОДВЕСКИ | 2000 |
|
RU2177147C1 |
| СЧИТЫВАЮЩЕЕ УСТРОЙСТВО | 1970 |
|
SU263463A1 |
| Упор для остановки длинномерного твердого тела | 1990 |
|
SU1761326A1 |
| Устройство для сигнализации о перегрузке стрелового крана | 1941 |
|
SU68333A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВОЛН | 2016 |
|
RU2655418C2 |
| УСТРОЙСТВО для РЕМОНТА МЕТАЛЛУРГИЧЕСКИХ ПЕЧЕЙ | 1972 |
|
SU354246A1 |
| МАГАЗИННЫЙ БУНКЕР | 1970 |
|
SU281883A1 |
Юо
Фиг .2
