Изобретение относится к общему машиностроению, в частности конструкции кулачковых механизмов для взаимного нреобразования возвратно-ноступательного и вращательного движений.
Известны пространственные кулачковые механизмы для взаимного преобразования возвратно-ностунательного и вращательного движения, содер}кащие ведущий и ведомый цилиндрические соосные кулачки с торцовыми нрофнлями взаимодействующими друг с другом посредством тел качения, а один из кулачков взаимодействует со стойкой посредством пружины. Недостатком известных механизмов является сложиость копструкцпп п певозможность самоустановки одного из кулачков относительно другого.
С целью упрощения конструкции, улучшения динамических характеристик механизма и самоустановки одного из кулачков относительно другого в предложенном кулачковом механизме нодпружипенный кулачок снабжен упругими пальцами, а пространственные профили кулачков выполнены в виде кольцевых волнообразных поверхностей, характеризующихся следующими параметрами:
ности; п - число оборотов в минуту вращающейся кольцевой поверхности;
,
где L - минимальный радиус кривизны выпуклостей; / - минимальный радиус кривизны впадин.
При этом радиус R тел качения, например, шариков, характеризуется неравенством;
10
где /г - коэффицнент трения качения; - коэффициент трения скольжения.
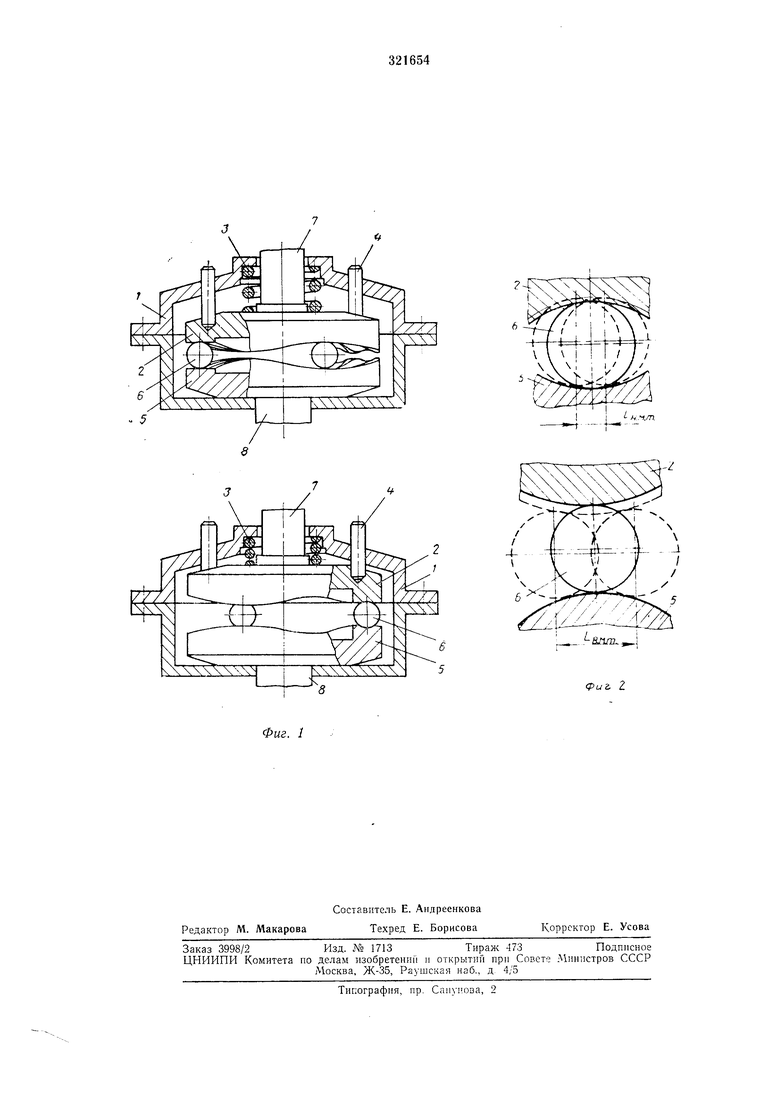
Иа фиг. 1 показан предложенный кулачковый механизм (кулачок, взаимодействующий со стойкой носредством пружины, находится в нижней мертвой точке н.м.т. и в верхней мертвой точке в.м.т.); на фиг. 2 - иоложенне
шарика в н.м.т и в в.м.т.
Механизм содержит корпус /, ведущий цилиндрический кулачок 2, подпружиненный пружиной 3 и снабженный упругими пальцами 4, ведомый цилиндрический кулачок 5,
выполненный так же, как и ведущий, с торцовыми профилями, расположенный соосно с ведущим кyлaчкo 2, тела качения, например шарики 6, с номощью которых может осуществляться взаимодействие ведущего 2 и вес которой с помощью пружины 5 может взаимодействовать ведущий цр лиыдрический кулачок 2, и вал 8. Пространственные профили цилиндрических кулачков 2 и 5 выполнены в виде кольцевых волнообразных поверхностей, характеризующихся следующими параметрами; V га , где V - частота колебаний ведущего цилиндрического кулачка 2; Z - число выпуклостей на кольцевой поверхности; п - число оборотов в минуту вращающейся кольцевой поверхности;где L - минимальный радиус кривизны выпуклостей; /-минимальный радиус кривизны впадин. При этом радиус К тел качеиия, например, шариков, характеризуется следующим неравенством:у, где k - коэффициент трения качения; f - коэффициент трения скольжения. Ведущий цилиндрический кулачок 2 может соверщать возвратно-поступательное движение. Его вращение вокруг общей оси устройства предотвращается пальцами 4, входящими в отверстия корпуса L Ведомый цилиндрический кулачок 5, посаженный на вал 8, лищен возможности перемещаться поступательно и может только вращаться в подщипниках корпуса. Механизм работает следующим образом. При вращении ведомого цилиндрического кулачка 5 щарики 6 под действием момента сил трения, катятся но профилироваииым поверхностям кулачков. Центры шариков при этом описывают эквидистанты профилей одновременно обоих кулачков, а это возможно только при условии одновременного изменения углового положения кулачков и осевого расстояния между ними. Поэтому нри вращении ведомого цилиндрического кулачка 5 ведущий цилиндрический кулачок 2 соверщает возвратно-поступательное движение с величиной хода в одном нанравлеиии, равной удвоенной высоте кулачка и частотой V гц., где V-частота колебаний кулачка; Z- число выпуклостей на кольцевой поверхности; п--число оборотов в минуту вращающейся кольцевой поверхности. Существует критическая зона /п.м.т., зависящая от кривизны контактирующих поверхностей и величины коэффициента и не зависящая от сил, действующих со стороны кулачков на щарики. Внутри зоны /и.м.т. шарик находится в состоянии безразличного равновесия i-i может нотерять устойчивость только при смещении на некоторую критиверхней мертвой ческуго величину точке шарик находится в метастабильном состоянии и может потерять устойчивость только при смещении на некоторую критическую величину- -. С каким бы сдвигом фаз в своем движении щарики не приходили в Н.М.Т., выйти из нее они могут только с ошибкой в положении, не превыщающей -- , а так как во всех остальных точка.х профиля кулачков критическая зона больше, чем в Н.М.Т., то щарик не может потерять устойчивость, пока накапливаемая в нроцессе движения ошибка в его положении не превысит разности ifl.M.T./н.м.т. Задаваясь выщеуказанным сопоставлением минимальных радиусов кривизны впадин и выпуклостей нрофиля кулачков, добиваются того, что ошибка всегда будет меньше вели/-В.М.Т.tn.M.r, и, следовательно. 22 устойчивой работы механизма. Предмет изобретения Пространственный кулачковый механизм для взаимного преобразования возвратно-поступательного и вращательного движений, содержащий ведущий и ведомый цил П1дрические соосные кулачки с торцовыми профиля:.1г, взаимодействующими друг с другом посредством тел качения, а один из кулачков взаимодействует со стойкой посредством прулсины, отличающийся тем, что, с целью упрощения конструкции, улучшения динамических характеристик механизма и самоустановки одного из кулачков относительно другого, иодирлокиненный кулачок снабжен упругими пальцами, а простраиственпые профили кулачков выполнены в виде кольцевых волнообразных поверхностей, характеризуюшихся следуюш.ими параметрами: Z-n V -гц , 120 где V - частота колебаии кулачка; Z - число выпуклостей на кольцевой поверхности; п - число оборотов в минуту вращающейся кольцевой поверхности; , где / - минимальный радиус кривизны впадин, L - минимальный радиус кривизны выпуклостей. При этом радиус К тел качения, например, шариков, характеризуется неравенством:
5
.
i I
t / // / .
,.
Фиг, 2.
Фиг. 1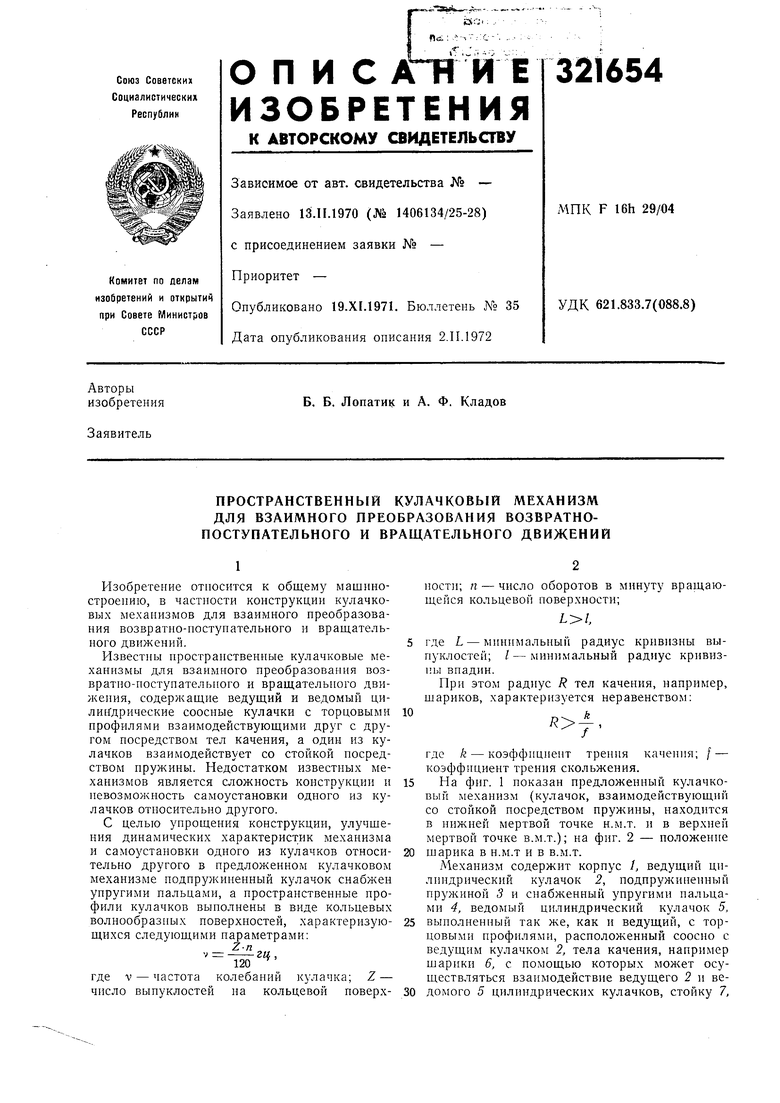
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКРИВОШИПНЫЙ ДВУХТАКТНЫЙ ДИЗЕЛЬ | 1997 |
|
RU2128774C1 |
| Механизм для преобразования вращательного движения в винтовое | 1977 |
|
SU734467A1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2211344C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2115810C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2182241C2 |
| Предохранительная муфта | 1978 |
|
SU670753A1 |
| ПЕРЕНОСНОЙ РЕЛЬСОСВЕРЛИЛЬНЫЙ СТАНОК | 1995 |
|
RU2092648C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С ТЕЛАМИ КАЧЕНИЯ | 2010 |
|
RU2438055C1 |
| МУФТА ДЛЯ ПЕРЕДАЧИ ВРАЩЕНИЯ В ГЕРМЕТИЧНЫЙ ОБЪЕМ | 2003 |
|
RU2252346C2 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2206479C2 |