Регзлятор иредназначен для исиользования в системах автоматического регулирования различных технологических процессов на тепловых электростанциях, характеризующихся изменением величины запаздывания регулирующего воздействия в щироких пределах.
Известны регуляторы, содержащие фазочувствительный усилительный каскад, соединенный с модулятором, основной триггер, вход которого связан с одним из выходов модулятора, и выходной каскад, выход которого подключен к контуру инерционной обратной связи, соединенному со входом фазочувствительного усилительного каскада.
Предлагаемый регулятор отличается тем, что содержит дополнительный триггер, соединенный со вторым выходом модулятора, блок временной подзарядки контура инерционной обратной связи, который соединен с этим контуром, управляемый нелинейный элемент, включенный между дополнительным триггером и блоком временной подзарядки контура инерционной обратной связи, а также содержит второй управляемый нелинейный элемент, включенный между основным триггером и выходным каскадом, блок инерционной задержки, соединенный с выходом выходного каскада, и промежуточный каскад, выход которого связан с блоком инерционной задержки, а два выхода соединены с управляющими входами обоих иелиаейиых эле.моитов.
Такое построение регулятора позволяет улучшить качество переходных процессов для
объектов с запаздыванием, изменяющимся в щироком диапазоне.
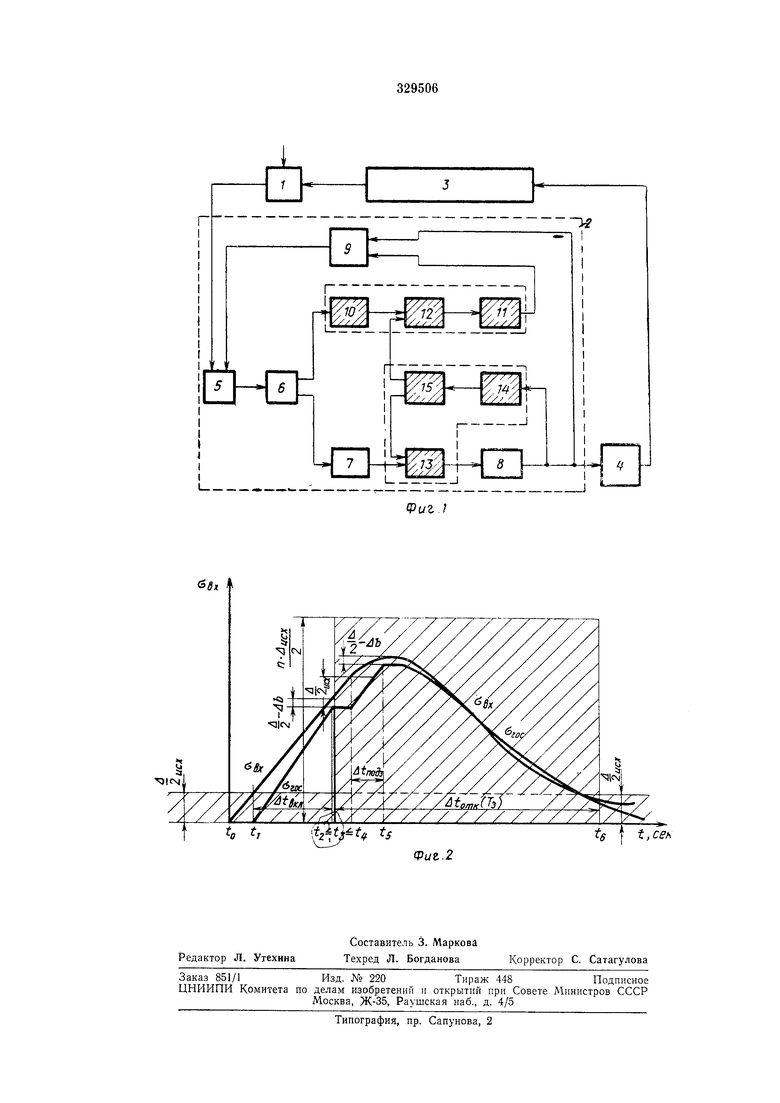
На фиг. 1 показана структурная схема системы автоматического регулирования с регулятором; на фиг. 2 - режим работы регулятора.
На чертежах обозначено: 1 - измерительный блок, 2 - нелинейный регулятор, 3 - объект регулирования н 4 - исиолнительньи механизм-сервомотор.
Регулятор содержит фазочувствительный усилительный каскад 5, модулятор 6, основной триггер 7, выходной каскад 8, контур инерционной обратной связи 9, дополнительный триггер JO, блок // временной подзарядки контура инерционной обратной связи, управляемый ключ - нелинейный элемент 12, второй управляемый ключ-нелинейный элемент 13, блок инерционной задержки 14 и промежуточный каскад 15.
Регулятор работает следующим образом.
када 5 модулятором 6 преобразуется в прямоугольное, затем оно подается на вход основного 7 и дополнительного W триггеров.
При амплптуде HJMпyльcoв, достаточных для управления, основной триггер 7 опрокидывается два раза за период, и на выходе каскада 8 появляется напряжение. При этом напряжение контура инерционной обратной связи 9 агос начинает увеличиваться. В момент t- (см. фнг. 2), когда разность ствх-сп-ос станет равной (где А& - зона нечувствительности по отпусканию) сервомотор 4 выключается. Процесс изменения (увеличения) регулируемой величины Ствх продолжается (особенно при наличии запаздывания) в первоначальном направлении (см. фиг. 2).
Однако при этом не происходит последующих кратковременных срабатываний регулятора. Это достигается за счет того, что в момент времени tz t происходит временное «загрубление регулятора путем увеличения исходной зоны нечувствительности.
Через время предварительной задержки, определяемое блоком 14, сигнал с выходного каскада 8 поступает также на промежуточный каскад 15, который подает сигнал на нелинейный элемент 13 для изменения его проводимости. Таким образом происходит увеличение исходпой зоны нечувствительности регулятора.
Предварительная задержка сигнала необходима, чтобы регулятор выключался сигналом с контура инерционной обратной связи ,9 прежде, чем произойдет его временное «загрубление.
Ёремя, в течение которого происходит «загрубление регулятора также устанавливается блоком 14.
Е момент времени , когда сигнал CTiix-cTj-oc становится равным или больше половины исходной зоны нечувствительности-,
происходит включение блока // (см. фиг. 2
пслз) .
При ЭТОМ ио сигналу с промежуточного каскада 15 сигнал триггера 10 через нелинсйпый элемент поступает на блок 11. В это время изменение как бы следует за изменением: Ствх.
В момент времени 5, когда Овх-Стгос
--- - А&, действие блока // прекращается.
i
Наличие блока временной подзарядки контура инерционной обратной связи обеспечивает все последующие включения при исходной зоне гечувствительности в соответствии с основным ПИД - законом регулирования.
Предмет изобретения
Нелинейный регулятор, содержащий фазочувствительный усилительный каскад, соединенный с модулятором, основной триггер, вход которого связан с одним из выходом модулятора, и выходной каскад, выход которого нодключен к контуру инерционной обратной связи, еоеди11енному со входом фазочувствительного усилительного каскада, отличающийся тем, что, с целью повыщения качества регулирования, регулятор содержит донолнительiiiiiii триггер, соединенный со вторым выхоло.м модулятора, блок временной подзарядки контура инерционной обратной связи, когорый связан с этим контуром, управляел1ый нелинейный элемент, включенный между
дополнительным триггером н блоком временпол подзарядки контура инерционной обратной связи, второй управляе.мый нелинейный элемент, включенный между основным триггером и выходным каскадом, блок инерционной задержки, соединенный с выходо.м выходного каскада, и нpOJмeжyтoчный каскад, вход которого связан е блоком инерционной задержки, а два выхода соединены с управляющими входами пелипейных элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЛИНЕЙНЫЙ РЕГУЛЯТОР | 1969 |
|
SU233772A1 |
| Трехкомпонентный акселерометр | 1981 |
|
SU1049432A1 |
| Устройство для регулирования производительности винтового компрессора | 1979 |
|
SU779982A1 |
| ПРОПОРЦИОНАЛЬНЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1965 |
|
SU174249A1 |
| Устройство для регулирования производительности винтового компрессора | 1980 |
|
SU864260A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 1994 |
|
RU2112927C1 |
| Устройство для регулирования термодинамических параметров воздуха | 1981 |
|
SU960761A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
Фиг..2
