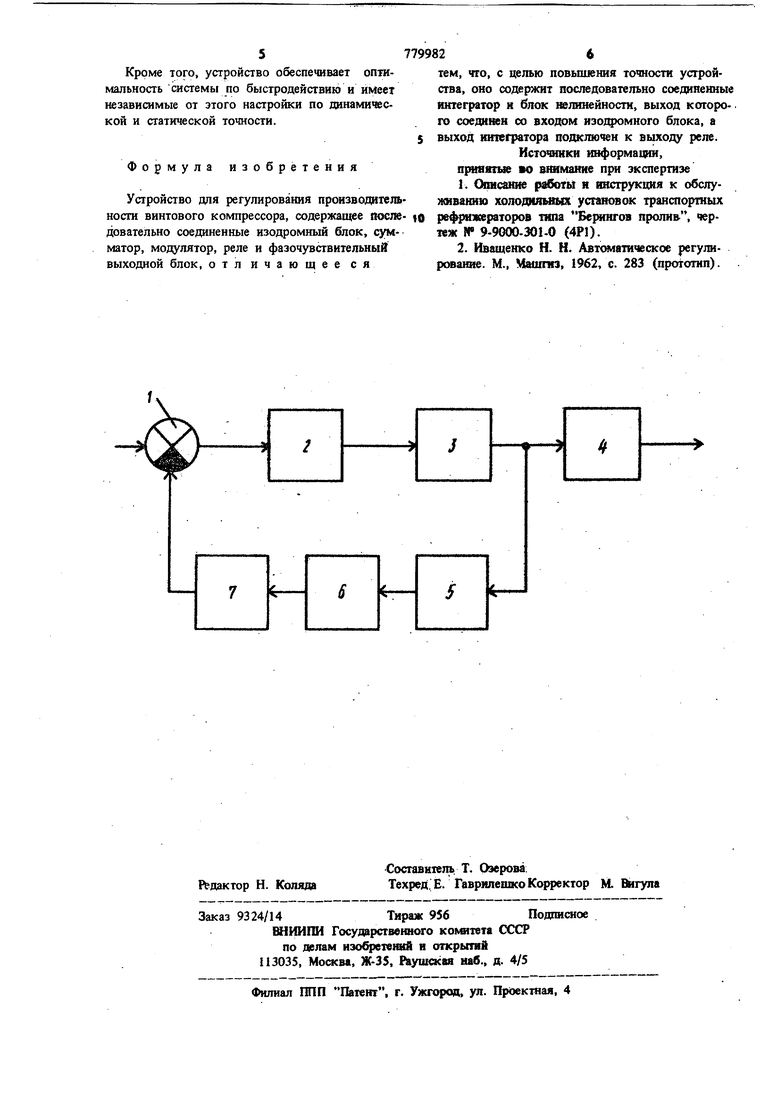
Изо тение относится к системам регулирования давления жидкостей и газов с нспользоваш1ем электрических средств и может быть использовано в холодильной технике, а также в судовой технике. Известны регуляторы производительности винтовых компрессоров для холодальных машин 1) выполненные на элементах дискретного действия и содержащие устройство ручного выбора режима движения сервопривода постоянной скорости. Устройство выбора режима движения преобразует сигнал управления сервоприводом в импульсы с дискретно регулируемой частотой, которая опре деляет время работы и остановки сервопривода. В соответствии с частотой импульсов изменяется средняя скорость сервопривода. Недостатками таких регуляторов являются: рупюй выбор скорости, колебательность сервопривода и недоиспользование его скоростных возмйжностей, а также небольшая статическая точность стабилизации температуры кипения холодильного агента. Наиболее близким по технической сущности к настоящему изобретению является регулятор производительности винтовых компрессоров для холодильных машин {2}, содержащий сумматор, модулятор, триггер, обладающий однозначной релейной характе жстикой и фазочувствительный выходной блок, соединенные последовательно и составляющие прямую цепь регулирования, а также изодро в{ый блок, подключенный через трансформатор обратной связи к выходу триггера. Корректирующий сигнал с выхода изодрошюго устройства подается на один из входов сумматора. На другой вход суммирующего устройства в противофазе с сигналом изощ)омного устройства приходит сигнал рассогласования, вырабатьшаемый датчиком давления кипеиия холодильного агента, включенным последовательно с измерительным усилителем и задающим устройством. При отклонении давления кипения от заданной величины появляется сигнал рассогласования, которьш поступает на вход сумматора. Выходной сигнал сумматора преобразуется модулятором в импульсы напряжения прямоугольной формы, фаза и амплитуда которых зависят от соотношения сигнала рассогласования и выхрдHoro сигнала изодромного блока. Серии импульсов затем поступают на триггер и перебрасьтают его в одно из устойчивых состояний. Сигналы с выхода триггера поступают на фазочувствительньш выходной каскад, который демодулирует и усиливает их по мощности для обеспечения управления работой сервопривода постоянной скорости. При срабатьгеании триггера сервопривод, вращаясь, перемещает золотник производительности винтового компрессора. Если амплитуда импульсов с выхода модулятора недостаточна, то триггер остается в устойчивом состоянии, при этом сервопривод останавливается. . Известн.ый регулятор реализует пропорциональ-5 но-интегральный закон регулирования при условии, что сервопривод и управляющий орган обладают интегрирующими свойствамиДанный регулятор малоэффективен при регулировании производительности винтовых ком- 20 прессоров, так как он работает со статической ошибкой. Появление статической ошибки связано с воздействием на золотник производительности силы, обусловленной перепадом давления 3 компрессоре. Это приводит к тому, что после 25 исчезновения управляющего импульса, золотник закрьшается, увеличивая тем самым производительность винтового компрессора, затраты электроэнергии увеличиваются. С зтим эффектом связано также возникновение автоколебаний серво- зо привода. Кроме того, в системе регулятор - объект существуют низкочастотные колебания давления кипения холодильного агента, связанные с тем, что сервопривод работает с постоянной скоростью при различных по ампли туде рассогласованиях. Недостатками данного регулятора, из-за присущих ему статистической ошибки и автоколебаний, являются пониженные значения КПД и ресурса работы винтового компрессора, а также его холодопроизводительности и показат лей энергетической эффективности. Цель данного изобретения - повышение точности регулирования С этой целью устройство содержит последов тельно соединенные интегратор и блок нелиней ности, выход которого соединен со входом изодромного блока, а вход интегратора подключен к выходу реле. На чертезюе показана блок-схема устройства для регулирования; производительности винтового компрессора дпя холодильных машин. Устройство содержит сумматор 1, модулятор 2, реле 3 с зоной нечувствительности, фазочувствительный выходной , блок 4, интегра тор 5, блок нелинейности 6, изодромный блок Устройство работает следуюшлм образом. Модулятор 2 формирует импульсы прямоугольной формы с амплитудой и фазой, зависящей от соотнощения сигналов рассогласования и вьиитаемого из него в сумматоре 1 выходного сигнала изодромного блока 7.
Если амплитуда сигналов с выхода модуля-, тора 2 больше зоны нечувствительности реле 3 с зоной нечувствительности, то они, усиливаясь и демодулируясь в фазочувствительном выходном блоке 4, поступают на сервопривод золот,щка производительности. Золотник производительности движется с максимальной скоростью до тех пор, пока накапливаемый в интеграторе 5 сигнал не достигнет значения, равного зоне нечувствительности блока 6 с двузначной нелинейностью гистерезисного вида. После этого, ««большой задержкой во времени, создававмой изодромным блоком 7, сигнал на вь1ходе сумматора 1 становится меньше зоны нечув.. ствительности реле 3 с зоной нечувствительности. Это поведет за собой остановку сервопривода золотника производительности. Повторные частые включения и выключения сервопривода не происходят, каковы бы ни были величины зоны нечувствительности реле 3 с зоной нечувствительности и настройка изодромного блока 7, т.е. его постоянная времени и коэффициент передачи. Это связано с тем, что вследствие гистерезисной характеристики блока 6, его выходной сигнал, отключающий сервопривод, остается неизменным в течении времени, пока выходной сигнал интегратора 5 не уменьшится (по абсолютной велишне) на величину зонь возврата блока 6 с двузначной нелинейностью гистерезисного вида. Лишь после зтого возможно повторное включение сервопривода в ту или иную сторону, при условии, что сигнал рассогласования отклонился за пределы требуемой точности, задаваемой зоной нечувствительности реле 3. Следовательно, в устройстве отсутствуют автоколебания, при этом выбором зон нечувствй- . тельности и возврата блока 6 с двузначной нелинейностью гистерезисного вида достигается высокое быстродействие, а выборо зоны нечувствительности реле 3 и настроек изодромного блока 7 - требуемая точность стабилизации давления кипения. Эффективность устройства для регулирования производительности винтового компрессора для холодильных машин выражается в значительной экономии потребляемой приводом компрессора электроэнергии (до 4%), увеличении холодопроизводительности и КПД холодильной машины на 2,5-3%, повьпиении точности стабилизаиии давления кипения хладагента, а, следовательно, температуры воздуха в охлаждаемых помещениях, температуры хранящихся продуктов, повышении износостойкости узлов винтового компрессора.
Кроме того, устройство обеспечивает оптимальность системы по быстродействию и имеет независимые от этого настройки по дииамической и статической точности.
Формула изобретения
Устройство для регулирования производитель ности винтового компрессора, содержащее пюсле довательно соединенные изодромный блок, сумматор, модулятор, реле и фазочувствительный выходной блок, отл ичающее ся
7799826
тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные интегратор и блок нелинейности, выход которо-. го соедннеи со входом изощюмного блока, а 5 выход нитегратора подключен к вьисоду реле.
Истошгаки информащш, прияяхые во внимание при экспертизе
1.(Угасание работы я шсструкция к обслуживанию ХОЛОДНЯЫ1Ш установок транспортных
«е ре жжераторов пша Бе яшгов пролив, чертеж И 9-9000-301-0 (4Р1).
2.Иваодешсо Н. Н. Автоматическое регулиравааак. М., Машгнэ, 1962, с. 283 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования производительности винтового компрессора | 1980 |
|
SU864260A1 |
| Устройство для регулирования производительности винтового компрессора | 1980 |
|
SU890372A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ ГИДРОТУРБИНЫ | 1969 |
|
SU258164A1 |
| Устройство для управления холодопроизводительностью компрессора холодильной машины | 1982 |
|
SU1062198A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КРАНОМ-РЕГУЛЯТОРОМ | 2007 |
|
RU2382392C2 |
| Следящая система | 1981 |
|
SU962847A1 |
| Регулятор относительного обжатия прокатываемой полосы | 1981 |
|
SU944696A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
