Известны пропорциональные экстремальные регуляторы шагового типа, содержащие входной преобразователь, подключенный через переключатель к запоминающему устройству, и вычислитель производной регулируемой величины, связанный с устройством, учитывающим запаздывание объекта и устанавливающим длительность рабочего шага.
В предлол енном регуляторе для уменьшения амплитуды колебаний регулируемой величины в области экстремума к устройству установления длительности рабочего шага подключено устройство, учитывающее время переходного процесса в объекте.
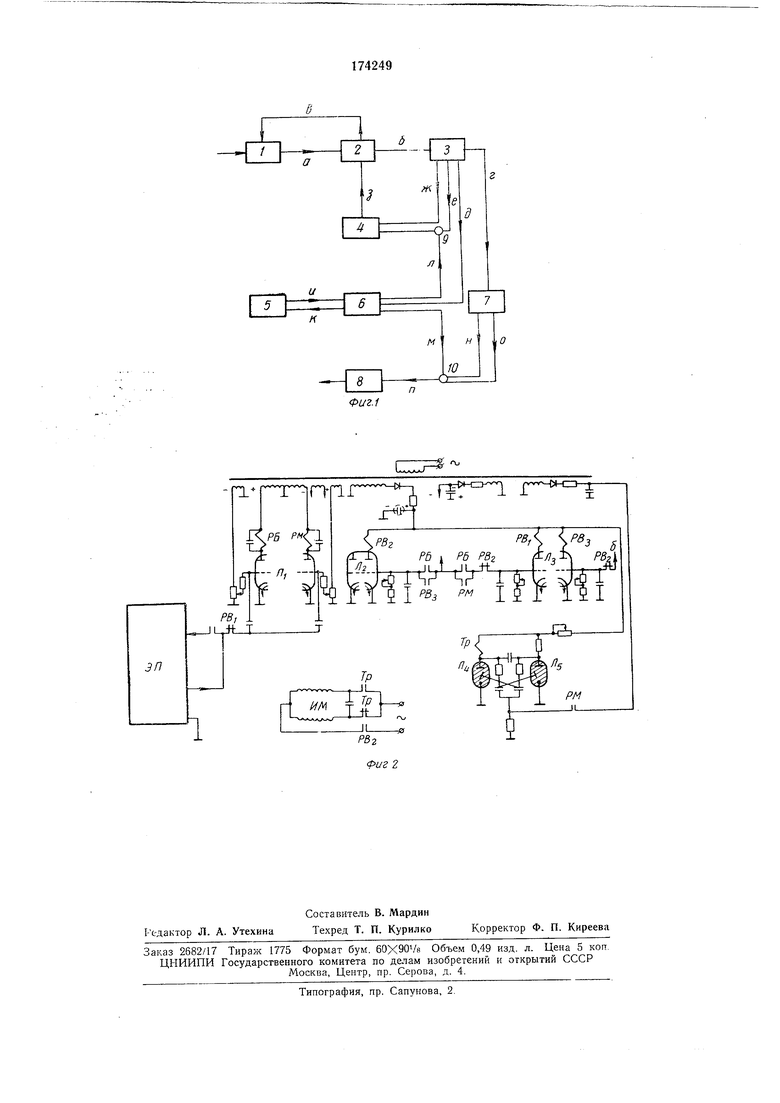
На фиг. 1 приведена блок-схема предложенного регулятора; на фиг. 2 - его принципиальная схема.
Регулятор содержит входное устройство /, включающее в себя блок памяти, преобразовательное и усилительное устройства; переключающее устройство 2; устройство 3 для определения скорости нарастания параметра и его знака; устройство 4, учитывающее запаздывание объекта и управляющее устройством 2; устройство 5, учитывающее врем.я переходного процесса объекта; устройство 6 для определения и установления необходимой длительности рабочего щага; устройство 7 для запоминания предыдущего направления регулирующего воздействия; исполнительный механизм 8; схемы 9 и 10 совпадения сигналов - логические ячейки типа «И.
Оптимальный экстремальный регулятор работает следующим образом.
Входной сигнал после преобразования и усиления в устройстве / поступает через переключающее устройство 2 на устройство 3. В зависимости от знака сигнала последнее выдаст кома-нды на устройства 4 и 6 (-в случае увеличения регулируемого параметра) и на устройства 7 и 5 (в случае уменьшения регулируемого параметра).
Если регулирование ведется на максимум, то имеют место первые две команды. Команда на устройство 4 (по связи ж) заставит его сработать и переключить сигнал на входное устройство, т. е. появится связь в и исчезнет связь б.
При поступлении сигнала на входное устройство последнее срабатывает и запоминает текущее значение регулируемого параметра.
Устройство 6 по связи д выдает команду установленной длительности через схему }0 совпадения на исполнительный механизм, подавая регулирующее воздействие (рабочий щаг) на объект регулирования. Через выбранное время выдерл ки устройство 4 вместе с устройством 2 возвратится в исходное положение. Связь а будет подключена
к связи б и отключена от связи в. Время выдержки устройства 4 определяется временем запаздывания объекта. Через некоторое время после подачи на объект регулирующего воздействия (рабочего шага) начнет изменяться регулируемый параметр, и на устройство 3 начнет поступать разность между текущим и запомненным значениями регулируемого параметра. Когда эта разность достигнет величины, равной величине срабатывания устройства 3, последнее сработает, и цикл запоминания текущего значения регулируемого параметра и выдачи регулирующего воздействия повторится. Частота повторения циклов зависит от крутизны экстремальной характеристики и от выбранных величин настроечных параметров экстремального регулятора (времени выдержки устройства 4 и длительности рабочего шага). Настроечные параметры экстремального регулятора в процессе регулирования остаются постоянными, поэтому частота циклов зависит только от крутизны экстремальной характеристики.
Поскольку экстремальная характеристика имеет переменную крутизну, то частота циклов или скорость движения Системы к экстремуму будет переменной. Переменная скорость движения, уменьшающаяся но мере приближения к экстремуму, обеспечивает хорощее согласование таких критериев качества экстремального регулирования, как максимальная скорость выхода системы на экстремум п минимальная амплитуда колебаний системы на экстремуме.
Достигнув экстремума, система продолжает двигаться за счет импульсов устройства 5, в котором устанавливается выдержка времени, равная времени переходного процесса объекта. Устройство 5 может работать или в самом начале работы экстремального регулятора, или на очень пологих участках экстремальной характеристики, в остальное время этому препятствует работа устройства 6, срабатывающего от команд устройства 3. Временное исключение из работы устройства 5, когда система движется к экстремуму за счет срабатывания устройства 3 (иначе, за счет крутизны экстремальной характеристики), улучшает работу экстремального регулятора в целом.
На пологих участках экстремальной характеристики устройства 5 и 6 работают совместно. Эта работа представляет собой работу генератора импульсов, длительность паузы которого обеспечивается выдержкой времени устройства 5, а длительность выходного импульса (рабочий шаг) - выдержкой времени устройства 6. Наличие генератора импульсов исключает остановку экстремального регулятора на пологих участках экстремальной характеристики, расположенных далеко от экстремума и делает регулятор работоспособным практически для лю
бых видов экстремальных зависимостей (кривых) .
В процессе движения си,стема переходит через экстремум, 3|Нак разности запомненного и текущего значений регулируемого параметра меняется на обратный. Когда разность достигает заданной величины, срабатывает устройство 3. Его команды поступают по связям е, г на устройство 7 и схе му .9. Поступление команды на устройство 7 изменяет его внутреннее состояние таким образом, что одна из выходных связей (например, связь Hj), существовавшая до этого, исчезает и появляется связь о. Это приводит к изменению направления движения исполнительного механизма, т. е. к изменению знака регулирующего воздействия. Очередной цикл запоминания текущего значения регулируемого параметра и подачи регулирующего воздействия происходит после срабатывания устройств 5 н 6. Команды устройства 6 поступят в этом случае ;на схемы 9 w W совпадения. На схему 9 также поступает команда устройства 3 по связи е, вследствие чего эта схема выдает команду на устройство 4, и происходит переключение сигнала на связь б, что приводит к срабатыванию элементов входного устройства и запоминанию текущего значения регулируемого параметра.
Процесс запоминания производится через определенное время, равное времени переходного процесса с момента срабатывания устройства 3. Эта задержка необходима,-так как позволяет устранить вредное влияние инерционности процесса, вызывающего ложные срабатывания системы, которые, в свою очередь, приводят к значительной амплитуде колебаний на экстремуме, а зачастую нарушают нормальное ведение процесса экстремального регулирования.
Команда устройства 6, поступающая на схему 10, дает рабочий шаг или регулирующее воздействие на объект. В данном случае, регулирующее воздействие направлено к экстремуму. В дальнейшем, система опять перейдет через экстремум, и процесс повторится. Система будет поддерживать экстремальное значение регулируемого параметра. Оптимальное ведение процесса поиска в данном регуляторе обеспечивается, с одной стороны, переменной скоростью движения к экстремуму и, с другой, - применением логически взаимосвязанных устройств 4, 5 ц 6. Устройство 4, учитывающее время запаздывания объекта, позволяет рационально скомпенсировать влияние остаточного сигнала от предыдущего регулирующего воздействия (рабочего шага), что вместе с выбором необходимой длительности рабочего шага позволяет получить наибольшую скорость движения системы к экстремуму при наименьшей величине регулирования. 5 /ройством 6 обеспечивает минимальную амплитуду колебаний системы на экстремуме. Электрическая схема экстремального регулятора, состоит из следующих узлов: электронного потенциометра, выполняющего роль5 преобразовательного, усилительного и запоминающего устройства; фазочувствительного ка.скада (ФЧК), определяющего знак и скорость нарастания регулируемого параметpa; трех реле времени, при пОлМощи которых10 учитываются динамические свойства объекта (iHa функциональной схеме им соответствуют устройства 4, 5 6); триггера, запоминающего предыдущее направление движения исполнительного ме-15 ханизма; исполнительного механизма; блока питания. Фазочувствительный каскад и реле времени собраны на лампах Л, Л, Л-л (фиг. 2). Триггер собран на лампах Л4, и Л(тиратронах с холодным катодом).20 Реле времени обозначены через РВ, РВ, РВз. Реле фазочувствительного каскада обозначены через РБ (реле, соответствующее увеличению регулируемого параметра) и РМ (соответствующее уменьшению пара-25 метра). Реле времени PBi соответствует , устройство 4 блок-схемы, реле времени РВ - устройство 6 и реле времени РВ - устройство 5. Экстремальный регулятор работает еле-30 дующим образом. После включения регулятора в работу реле PBg дает первый импульс, поступающий «а РВ. Реле времени РВ вырабатывает команды постоянной длительности и35 подает их на исполнительный механизм ИМ. Первая команда поступает после, первого импульса от РВ. Если полученное приращение регулируемого параметра имеет положительный знак, то после преобразования и40 усиления, оно вызовет срабатывание реле РВ фазочувствительного каскада. Реле РБ подает команды на сетки ламп Ло и Лз реле РВ и PBz, что приводит к срабатыванию этих реле. Реле PBj переключается, и сигнал45 перестает поступать на ФЧК и начинает поступать на усилитель мощности электронного потенциометра ЭП. Двигатель потенциометра начинает вводить компенсационную э. д. с., сводя полученное- приращение пара-50 метра к нулю. После установленной выдержки времени реле РВ возвращается в исходное состояние и поступающий сигнал снова может поступать на вход фазочувствительного каскада. Реле РВ дает очеред-55 ную команду на исполнительный механизм ИМ. Экстремальный регулятор получает новое приращение регулируемого параметра. Такие циклы повторяются до тех пор, пока система не выйдет в область экстремума. В60 6 этом месте экстремальная характеристика имеет крутизну, при которой один шаг не дает необходимой величины приращения, достаточной для срабатывания реле фазочувствительного каскада. В этом случае в работу включается реле РВ, которое было отключено воздействием первого импульса. Отрицательный импульс, поданный на сетку Л реле РВ из реле РВ включает реле PBg. Если паузы между срабатываниями реле PBz (срабатывания РВ происходят от реле РБ фазочувствительного каскада) меньше, чем паузы между срабатываниями реле Pfig, то РВ- каждый раз подзаряжается отрицательным импульсом, не успев сработать. Когда паузы между срабатываниями реле РВ-2 становятся больше пауз РВ, последнее включается и система переходит через зкстремум. При этом сигнал меняет фазу на противоположную. Полученное приращение вызывает срабатывание реле РМ фазочувствительного каскада, которое подает команду на переключение триггера. Новое положение триггера соответствует обратному направлению вращения исполнительного механизма ИМ. Система снова начинает приближаться к экстремуму. Для учета инерционности объекта и неключения ложных срабатываний регулятора в схеме предусмотрена временная задержка ввода компенсирующей э. д. с. Это осуществляется последовательным включением контактов РМ и РВ в цепи сетки лампы i реле РВ. На сетку этой лампы сигнал подается только после срабатывания реле РМ и реле РВ. Контакт реле РМ после срабатывания замкнут до тех пор, пока сигнал, вызвавший его срабатывание, не станет равным нулю. Это происходит после ввода компенсирующей э. д. с. Реле PBz срабатывает от реле РВ, которое определяет необходимое время выдержки, Предмет изобретения Пропорциональный экстремальный регулятор шагового типа, содержащий входной преобразователь, подключенный через переключатель к запоминающему устройству и вычислитель производной регулируемой величины, связанный с устройством, учитывающим запаздывание объекта и устанавливающим длительность рабочего шага, отличающийся тем, что, с целью уменьшения амплитуды колебаний регулируемой величины в области экстремума, в нем установлено устройство учета времени переходного процесса. в объекте, подключенное к устройству уста-. новления длительности рабочего шага. р МЯ-СЭРВ, Рвз Р6 1 Р6 РВг rt PBs РМ X 5
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1973 |
|
SU374578A1 |
| Способ экстремального регулирования инерционных объектов с транспортным запаздыванием | 1975 |
|
SU1125601A1 |
| НЕЛИНЕЙНЫЙ РЕГУЛЯТОР | 1969 |
|
SU233772A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1969 |
|
SU241137A1 |
| Регулятор | 1987 |
|
SU1425599A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ГИДРОТРАНСПОРТИРОВАНИЯ | 1973 |
|
SU383798A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| ЦИФРОВОЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР | 1968 |
|
SU212356A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1439530A1 |
| ЭЛЕКТРОННЫЙ УСИЛИТЕЛЬ | 1970 |
|
SU288056A1 |