Изобретение относится к самонастраивающимся системам управления с переменной структурой и может быть использовано для автоматизации технологических процессов с изменяющимся запаздыванием, обусловленным переменным коэффициентом усиления объекта регулирования, в частности для автоматизации управления тепловыми процессами энергоблоков.
Цель изобретения - расширение области применения и повышение точности при отработке основных возмущений.
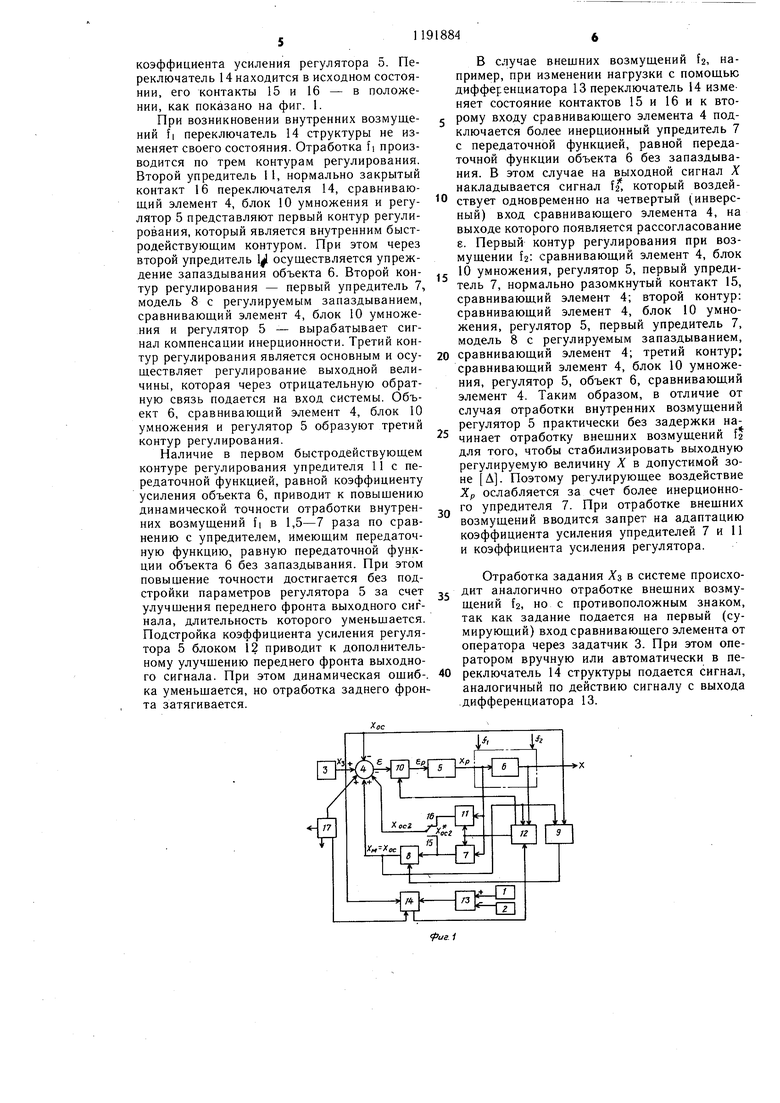
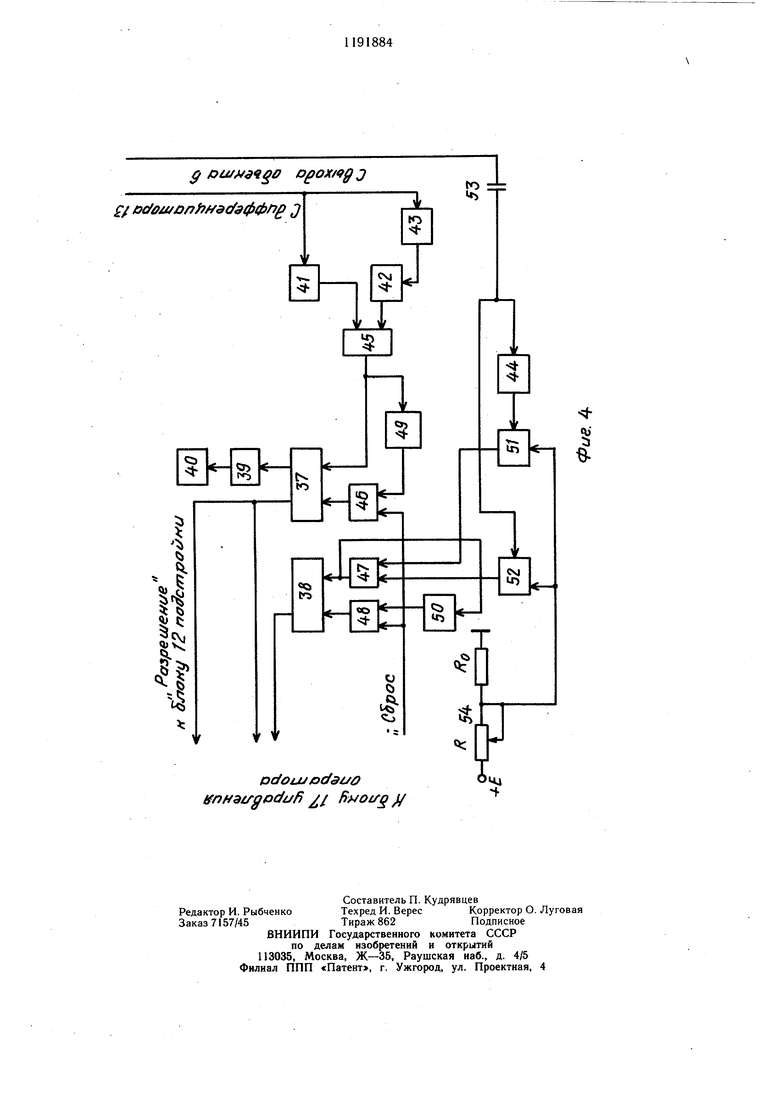
На фиг. 1 приведена структурная схема адаптивной системы управления для объектов с изменяющимся запаздыванием; на фиг. 2 - структурная схема блока подстройки запаздывания; на фиг. 3 - структурная схема блока подстройки кoэффициeнtoв; на фиг. 4 - функциональная схема переключателя структуры.
Система содержит датчик 1 нагрузки, датчик 2 расхода топлива, задатчик 3, сравнивающий элемент 4, регулятор 5, объект 6 управления, первый упредитель 7, модель 8 с регулируемым запаздыванием, блок 9 подстройки запаздывания, блок 10 умножения, второй упредитель 11, блок 12 подстройки коэффициентов, дифференциатор 13, переключатель 14 структуры с нормально разомкнутым и нормально замкнутым контактами 15 и 16, и пульт 17 управления оператора.
Первый упредитель 7 реализуется в виде последовательно соединенных нескольких инерционных звеньев и усилительного звена, а второй упредитель 11 - в виде усилительного звена.
Блок 9 подстройки запаздывания содержит второй усилитель 18, второй триггер 19, первый усилитель 20, первый триггер 21, дешифратор 22, счетчик 23, задатчик 24 запаздывания, управляемый генератор 25 опорной частоты (УГОЧ) и блок 26 управления.
В каждом цикле адаптации (либо при изменении задания с задатчика 3, либо при подаче единичного пробного скачка) на выходе объекта 6 и модели 8 с регулируемым запаздыванием появляется соответственно через время запаздывания TO и т,„ изменение сигналов. Начало изменения сигналов на выходах объекта 6 и модели 8 определяется соответственно с помощью усилителей 18 и 20, которые формируют пороговые потенциалы переключения для триггеров 19 и 21 практически без задержки. При этом, если первым в единичное состояние устанавливается триггер 21, то т TO. В первом случае сигналом с второго выхода дещ,ифратора 2.2 счетчик 23 устанавливается в режим сложения; с управляемого генератора 25 снимается запрет на генерацию и в счетчик 23 заносится дополнительное количество импульсов, пропорциональное разности То - т,„. Генерация УГОЧ 25 в рассматриваемом случае прекращается, когда триггер 19 также установится в единичное состоя1ие, так как при этом с четвертого выхода дещифратора на него постус пает запрещающий сигнал. Во втором случае счетчик 23 устанавливается в режим вычитания сигналом с третьего выхода дещиф ратора 22, при этом из содержимого счетчика 23 вычитаются импульсы, т. е. реализуется аналогичным образом зависимость 0 то-т„,.
Установка прогнозируемого первоначально времени запаздывания Тто в счетчике 23 производится задатчиком 24 запаздывания. Блок 26 управления осуществляет подстройку запаздывания в модели 8. На его входы поступает код т„, ± Ат TO. Этот код преобразуется с помощью блока 26 в аналоговый сигнал, который воздействует на модель 8 и изменяет ее запаздывание так,
Q чтобы оно стало равным запаздыванию объекта 6.
Блок 12 подстройки коэффициентов содержит блок 27 подстройки коэффициентов упредителей, который состоит из блока 28 аналого-цифрового преобразователя, блока
5 29 деления, блока 30 умножения, задатчика 31 коэффициентов, первого регистра 32 и первого цифроаналогового преобразователя 33, задатчик 34, второй регистр 35 и второй цифроаналоговый преобразователь 36.
Переключатель 14 структуры содержит триггеры 37 и 38 внещних и внутренних возмущений соответственно, усилитель 39, герконовое реле 40, первый и второй формирователи 41 и 42, первый и второй инвертирующие усилители 43 и 44, элементы ИЛИ 45--48, элементы НЕ 49 и 50, первый и второй компараторы 51 и 52, разделительный конденсатор 53, делитель 54 напряжения источника Е.
Пульт 17 управления оператором, соединенный первым выходом с пятым входом сравнивающего элемента 4, а вторым выходом - с первым входом переключателя 14 структуры, служит для управления всеми блоками системы управления, для формирования единичного пробного (калиброванного) скачка и контроля состояния системы.
В основу построения адаптивной системы управления для объектов с изменяющимся запаздыванием положен принцип упреждения запаздывания и компенсации инерционности при адаптивной подстройке коэффициентов усиления первого и второго упредителей и коэффициента усиления регулятора с переключением структуры упредителей в зависимости от вида возмущения.
Известно, что сложный объект, содержащий опережающий и инерционный участки, с достаточной степенью точности 1ожет быть
аппроксимирован следующей передаточной функцией:
-pto
Книв
И/ИИ - .
(Гор + 1)(аор +1)Тор + 1
(1)
где Кин, То, Оо и То - коэффициент усиления, больщая и меньщая постоянные времени,эквивалентная постоянная времени объекта 6; То- время запаздывания
объекта;
- передаточная функция объекта 6 без запаздывания.
Исходя из структурной схемы системы можно записать изображение сигналов в виде Х WHH;(2)
-рт«.
(3)
Xocj Хм Хр- Wyje
(4)
ХоСг ХоС г, Хр W;y2,Q
ИЛИ
Xocj, Хосг XpW,/j Q(5)
где Wjj и Wj/j, - соответственно передаточные функции первого и второго упредителей 7 и 11; Тц - величина времени запаздывания модели 8. Q- переключающая функция, которая согласно структурной схеме, в частности, принимает два значения: Q 1, если f2 О и 0; , если или (6)
Передаточная функция первого упредителя 7 выбирается равной передаточной функции объекта 6 без запаздывания, т. е.
Wy ГГн,(7)
где м обозначает модель.
Передаточная функция второго упредителя 11 выбирается равной коэффициенту усиления объекта б, т. е. Wy (8)
Основными параметрами объекта, определяющими работоспособность систем управления для объектов с изменяющимся запаздыванием, являются его время запаздывания и коэффициент усиления.
В предлагаемой системе так же, как и в прототипе, время запаздывания, объекта считается переменным, что характерно, например, для систем теплоэнергетических объектов, работающих при переменной нагрузке. При этом время запаздывания объекта с достаточной точностью моделируется с помощью модели 8 с регулируемым запаздыванием, т. е. выполняется следующее соотношение после адаптации: TO.(9)
Условием компенсации инерционности является равенство W« е-Р W 6-, (10)
а условия упреждения запаздывания мают вид
Wy, W«« или
W7.,, КГн ..(12)
При выполнении условий (10) -(12) имеет место компенсация инерционности и упреждение запаздывания. При этом сигнал с упредителя является по существу предска занием значения выходного сигнала на временном
0 интервале ю. Он информирует регулятор о влиянииоказанного или управляющего воздействия на регулируемую переменную, и, следовательно, регулятор не вызывает перерегулирования при заданном значении сигнала рассогласования. Обратная связь по ре гулируемой переменной необходима для того, чтобы чувствовать влияние возмущений, действующих на объект.
Фактически реакция замкнутой системы X является в этом случае «задержанной верQ сией реакции системы без запаздывания. Система при этом работает с максимальной скоростью и имеет лучщую реакцию (при той же передаточной функции регулятора), чем в случае без использования метода компенсации и упреждения.
5 Недостатки метода компенсации и упреждения запаздывания при неадекватности модели и объекта устраняются с помощью адаптивных подстроек.
Переключение структуры упредителей 7 и 11 позволяет повысить точность при отработке как внутренних, так и внещних возмущений.
Параметры динамической настройки регулятора 5 могут быть определены с помощью известного компенсационного метода, J обеспечиЁающего минимум среднеквадратичной ощибки регулирования.
КР
(13)
н боКин о
T TO ,(14)
причем время изодрома регулятора устанавливается при максимальной нагрузке объекта, тогда То имеет минимальное значение. Адаптивная система управления работает следующим образом.
В исходном состоянии системой производится отработка задания, поступающего с задатчика 3. Регулируемая величина X находится в допустимой зоне регулирования Д.Ошибка рассогласования е О и ошибка регулирования ер 0. В блоке 9 подстройки хранится код запаздывания: при первоначальном включении системы - прогнозируемое значение Тм, а после адаптивной подстройки - тл То. Модель 8 с регулируемым запаздыванием настроена. В блоке 12 подстройки коэффициентов хранятся коды усиления упредителей 7 и 11 (при первоначальном включении - прогнозируемые значения Км Кисх, а после адаптивной подстройки - Ki К2 Ко) и код подстройки
коэффициента усиления регулятора 5. Переключатель 14 находится в исходном состоянии, его контакты 15 и 16 - в положении, как показано на фиг. 1.
При возникновении внутренних возмущений f| переключатель 14 структуры не изменяет своего состояния. Отработка f i производится по трем контурам регулирования. Второй упредитель 11, нормально закрытый контакт 16 переключателя 14, сравнивающий элемент 4, блок 10 умножения и регулятор 5 представляют первый контур регулирования, который является внутренним быстродействующим контуром. При этом через второй упредитель 1 осуществляется упреждение запаздывания объекта 6. Второй контур регулирования - первый упредитель 7, модель 8 с регулируемым запаздыванием, сравнивающий элемент 4, блок 10 умножения и регулятор 5 - вырабатывает сигнал компенсации инерционности. Третий контур регулирования является основным и осуществляет регулирование выходной величины, которая через отрицательную обратную связь подается на вход системы. Объект 6, сравнивающий элемент 4, блок 10 умножения и регулятор 5 образуют третий контур регулирования.
Наличие в первом быстродействующем контуре регулирования упредителя 11 с передаточной функцией, равной коэффициенту усиления объекта 6, приводит к повыщению динамической точности отработки внутренних возмущений fi в 1,5-7 раза по сравнению с упредителем, имеющим передаточную функцию, равную передаточной функции объекта 6 без запаздывания. При этом повышение точности достигается без подстройки параметров регулятора 5 за счет улучшения переднего фронта выходного сигнала, длительность которого уменьшается. Подстройка коэффициента усиления регулятора 5 блоком 12 приводит к дополнительному улучшению переднего фронта выходного сигнала. При этом динамическая ошиб-. ка уменьшается, но отработка заднего фронта затягивается.
В случае внешних возмущений f2, например, при изменении нагрузки с помощью дифференциатора 13 переключатель 14 изменяет состояние контактов 15 и 16 и к второму входу сравнивающего элемента 4 подключается более инерционный упредитель 7 с передаточной функцией, равной передаточной функции объекта 6 без запаздывания. В этом случае на выходной сигнал X накладывается сигнал fit который воздействует одновременно на четвертый (инверсный) вход сравнивающего элемента 4, на выходе которого появляется рассогласование е. Первый контур регулирования при возмущении f2: сравнивающий элемент 4, блок
10 умножения, регулятор 5, первый упредитель 7, нормально разомкнутый контакт 15, сравнивающий элемент 4; второй контур: сравнивающий элемент 4, блок 10 умножения, регулятор 5, первый упредитель 7, модель 8 с регулируемым запаздыванием,
0 сравнивающий элемент 4; третий контур; сравнивающий элемент 4, блок 10 умножения, регулятор 5, объект 6, сравнивающий элемент 4. Таким образом, в отличие от случая отработки внутренних возмущений регулятор 5 практически без задержки на чинает отработку внещних возмущений ff для того, чтобы стабилизировать выходную регулируемую величину X в допустимой зоне Л. Поэтому регулирующее воздействие Хр ослабляется за счет более инерционного упредителя 7. При отработке внешних возмущений вводится запрет на адаптацию коэффициента усиления упредителей 7 и 11 и коэффициента усиления регулятора.
Отработка задания Хз в системе происхо5 дит аналогично отработке внешних возмущений f2, но с противоположным знаком, так как задание подается на первый (сумирующий) вход сравнивающего элемента от оператора через задатчик 3. При этом оператором вручную или автоматически в пе0 реключатель 14 структуры подается сигнал, аналогичный по действию сигналу с выхода .дифференциатора 13.
фиг. 2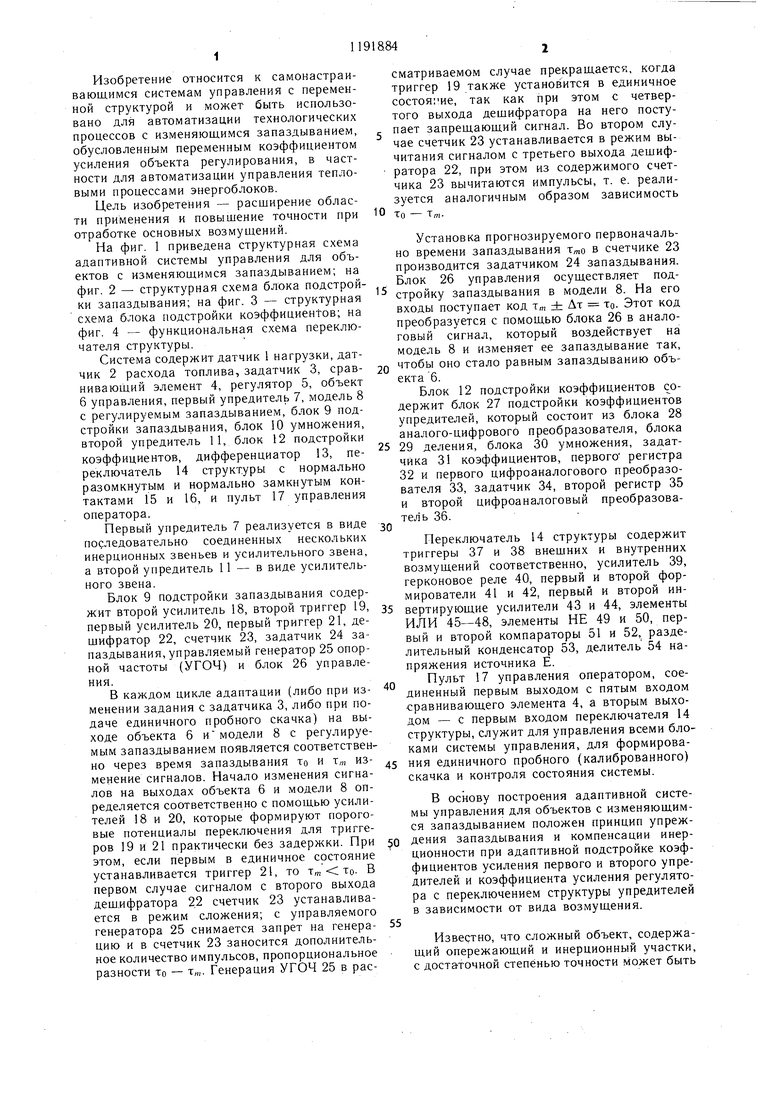

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Адаптивная система управления | 1983 |
|
SU1174902A1 |
| Адаптивная система управления для объектов с запаздыванием | 1980 |
|
SU1015336A1 |
| Адаптивная система регулирования для объектов с изменяющимся запаздыванием | 1980 |
|
SU968788A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ПЕРЕМЕННЫМ ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ | 2003 |
|
RU2258950C2 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |

АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ИЗМЕНЯЮЩИМСЯ ЗАПАЗДЫВАНИЕМ, содержащая датчики нагрузки и расхода топлива, последовательно соединенные задатчик и сравнивающий элемент, регулятор, подключенный выходом к входу объекта управления, и последовательно соединенные первый упредитель и модель с регулируемым запаздыванием, подключенную выходом к третьему входу сравнивающего элемента, четвертый вход которого соединен с выходом объекта, а также блок подстройки зап.аздывания, подключенный первым входом к выходу объекта управления, а вторым входом и выходом - соответственно к выходу и второму входу модели с регулируемым запаздыванием, отличающаяся тем, что, с целью расширения области применения и повышения точности при отработке основных возмущений, она дополнительно содержит блок умножения, второй упредитель, блок подстройки коэффициентов, дифференциатор, переключатель структуры с нормально открытым и нормально замкнутым контактами и блок управления оператора, причем первый, второй и третий входы блока подстройки коэффициентов подключены соответственно к выходу объекта управления, выходу модели с регулируемым запаздыванием и выходу переключателя структуры, первый выход блока подстройки коэффициентов подключен к второму входу блока умножения, включенному между выходом сравнивающего элемента и входом регулятора, а второй выход блока подстройки коэффициентов - к второму входу первого упре & дителя, соединенного выходом с нормально открытым контактом переключателя структуры, и к второму входу второго упредителя соединенного первым входом с входом объекта управления, а выходом через нормально закрытый контакт переключателя - с вторым входом сравнивающего элемента, пятый вход которого подключен к первому вылоду пульта управления оператора, подключенного вторым выходом к первому входу переключателя структуры, второй и треСО тий входы которого соединены соответственно с выходами объекта управления и диф00 00 ференциатора, суммирующий и инверсный входы которого подключены соответственно к выходам датчиков нагрузки и расхоN да топлива.
с Выхода
Н §лону fO
i/MHO e/ ujf
/f t/rrpedi/me fi/
X - с Выхода
модели 6
„ fiyzpetjt/effae с 5j7Offa /
фаг. 3
о ох/9д
f oe/OJu/oл ff/дcfэффn J
su
,
I
pdOUJ OC/3L/O
ynHBirgod /i l finoif
| Дралюк Б | |||
| Н., Синайский Г | |||
| В | |||
| Системы автоматического регулирования объектов с транспортным запаздыванием | |||
| М.: Энергия, 1969, с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Адаптивная система регулирования для объектов с изменяющимся запаздыванием | 1980 |
|
SU968788A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
