Изобретение относится к области выделения (селекции ) динамических (движущихся) объектов из совокупности стационарных с помощью пассивной электронно-оптической техники (телевизионной, инфракрасной, оптикомеханической, фотоэлектрической и т. д.). Такие вопросы возникают при анализе заданной совокупности различных случайных объектов с целью исследования отдельных из них, имеющих определенные параметры (например, скорость перемещения ). В этом случае нет необходимости анализировать каждый объект совокупности, что затрудняет процесс обследова«ия, а достаточно выделить из имеющейся совокупности только динамические объекты, т. е. для которых .
Известны методы автоматического выделения динамических объектов. К ним можно отнести все способы, использующие донллеровский эффект; методы, основанные на изменении интенсивности облучения фотоэлемента, на использовании оригинальных траекторий сканирования, па модуляции светового потока, на анализе сейсмоколебаний при движении объекта на местности. Известен также ряд телевизионных систем, выделяющих движущиеся объекты на ярком фоне.
ботки электромагнитных или иных импульсов зондирования (например в допплеровских системах), что вскрывает работу систем обнаружения движущихся объектов;
низкая степень помехозащищен«ости;
использование очень сложных и малоэффективных способов селекции движущихся объектов из совокупности стационарных;
зависи.мость эффективности обнаружения от контрастности объекта и стационарности поля (фона);
трудности в одновременной селекции нескольких динамических объектов с разными скоростями движения;
невозможность визуального наблюдения только динамических объектов- без присущего им фона и стационарных объектов.
Для выделения динамических объектов, перемещающихся с различными скоростями, из совокупности стационарных или слабо флуктуирующих в широком диапазоне изменения скоростей перемещения, определение их геометрических и динамических параметров и визуальное наблюдение этих динамических объектов без стационарного фона по предлагаемому способу записанное на телевизионной трубке изображение оптически изолируют от реального изображения анализируемой совокупности объектов, хранят на этой трубке в течение времени, определяемого диапазоном возможных динамических характеристик объектов поиска, далее считывают в режиме шаговой развертки с одновременным стиранием, задерживают полученный видеосигнал на время развертки одного кадра изображения, повторяют запись и считывание следующего кадра изображения анализируемой совокупности, сравнивают по строкам и столбцам считываемые дискретные сигналы с задержанными и по величине временного рассогласования судят о параметрах перемещения динамических объектов, а по общему числу импульсов рассогласования- о их геомет1р.ических характеристиках.
Для индикации и визуального контроля ди нам,ических объектов разностные сигналы от ряда идентичных датчиков по каналам связи связывают в систему зонального обнаружения динамических объектов и подают на индикатор (сигнализатор) и видеоконтрольное устройство, индицирующее местонахождение динамического объекта.
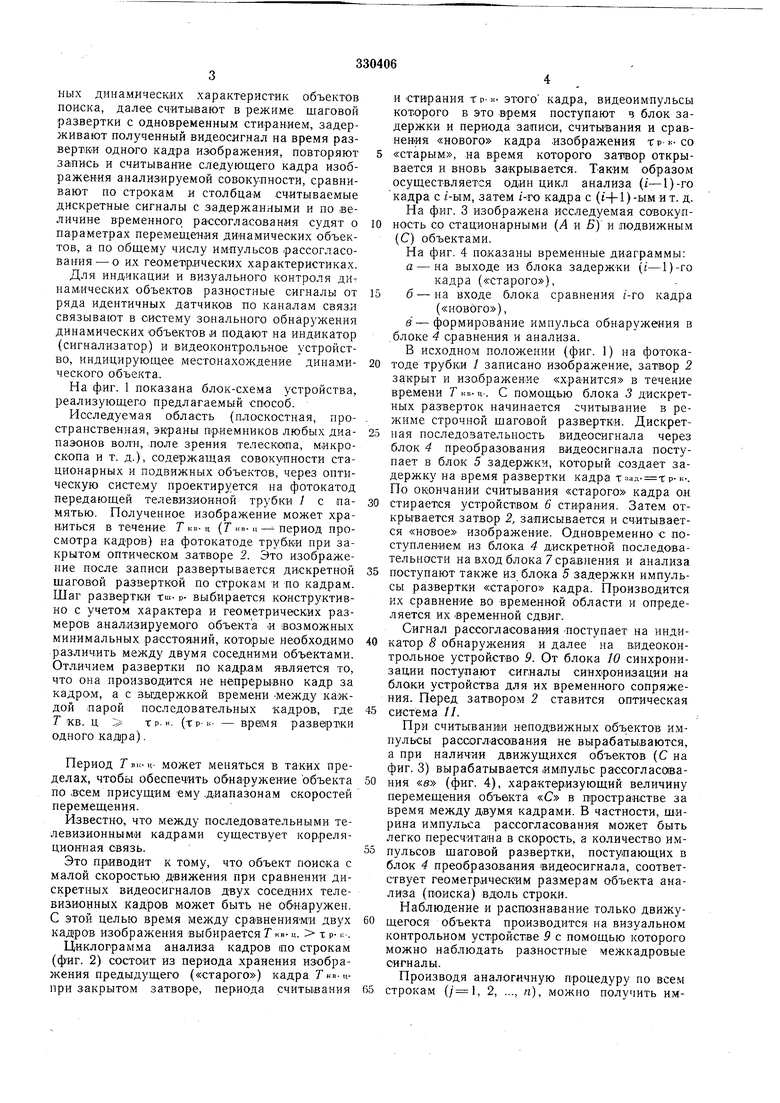
На ф.иг. 1 показана блок-схема устройства, реализующего предлагаемый способ.
Исследуемая область (плоскостная, пространственная, экраны приемников любых диапазонов волн, .поле зрения телескопа, микроскопа и т. д.), содержащая совокупности стационарных и подвижных объектов, через оптическую систему проектируется на фотокатод передающей телевизионной трубки I с памятью. Полученное изображение может храниться в течение Г кв. ц (Гкв. д- период просмотра кадров) на фотокатоде трубки при закрытом оптическом затворе 2. Это изображение после записи развертывается дискретной шаговой разверткой по строкам и по кадрам. Шаг развертки тш- р- выбирается конструктивно с учетом характера и геометрических размеров анализируемого объекта « возможных минимальных расстояний, которые необходимо различить между двумя соседними обьектами. Отлйчием развертки по кадрлм является то, что она производится не непрерывно кадр за кадром, а с зьгдержкой времени -между каждой парой последовательных кадров, где Т кв. ц т р. к. (ТР-К- - развертки одного кадра).
Период Т ви- и- может меняться в таких пределах, чтобы обеспечить обнаружение объекта по ,всем присущим «му .диапазонам скоростей перемещения.
Известно, что между последовательными телевизионными кадрами существует корреляционная связь.
Это приводит к тому, что объект поиска с малой скоростью движения при сравнении дискретных видеосигналов двух соседних телеБиаионных кадрОВ может быть не обнаружен. С этой целью время между сравнениями двух кадров изображения выбирается Т кв- ц. т р- к-.
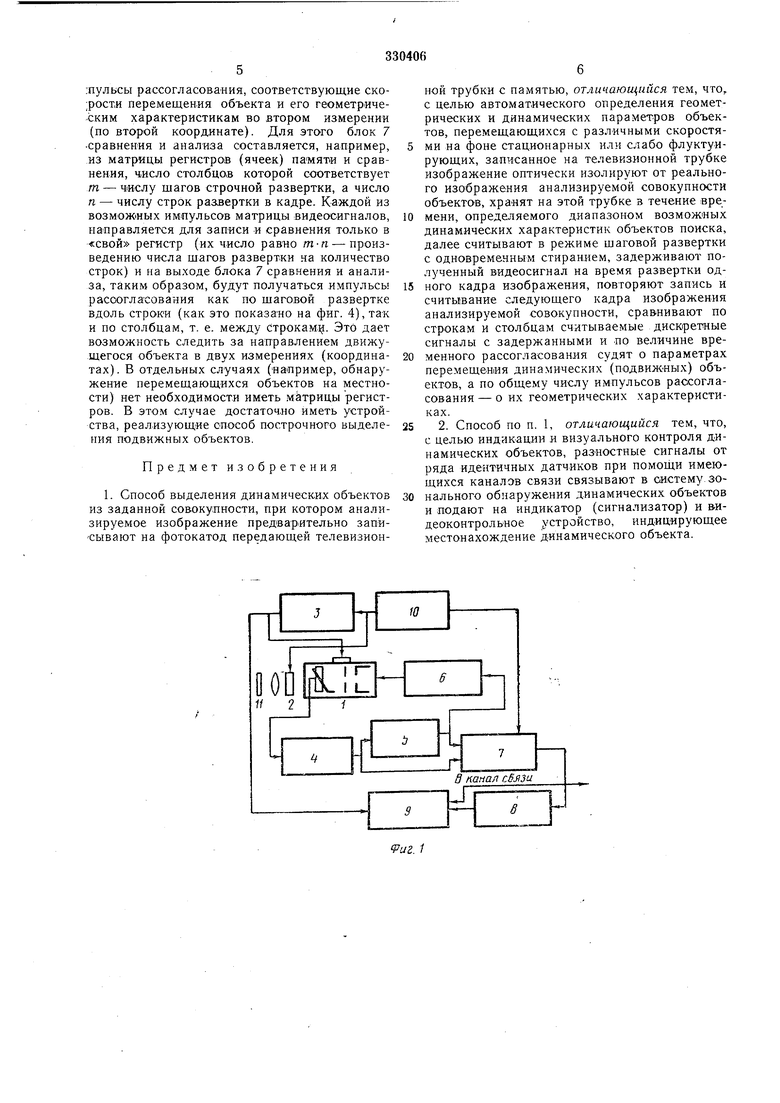
и стирания ТР-К- этого кадра, видеоимпульсы которого в это время поступают в блок задержки и периода записи, считывания и сравнения «нового кадра изображения -ГР-Ь--СО «старым, на время которого затвор открывается и вновь закрывается. Таким образом осуществляется один цикл анализа (f-1)-го кадра с /-ЫМ, затем ьго кадра с (1+1)-ыми т. д. На фиг. 3 изображена исследуемая совокупность со стационарными (А и Б) и подвижным (С) объектами.
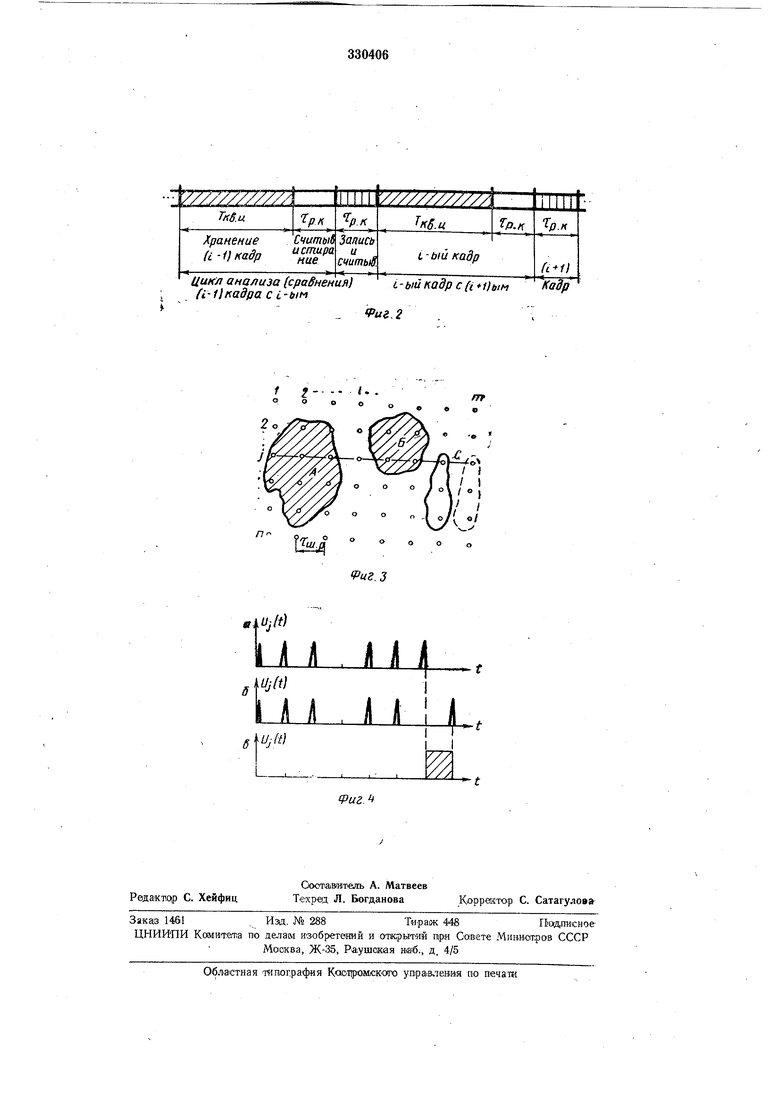
На фиг. 4 показаны временные диаграммы: а - на выходе из блока задержки (г-1)-го кадра («старого),
б - на входе блока сравнения г-го кадра
(«нового),
в - формирование импульса обнаружения в .блоке 4 сравнения и анализа.
В исходном положении (фиг. 1) на фотокатоде трубки / записано изображение, затвор 2 закрыт и изображение «хранится в течение времени Г ив. ц.. С помощью блока 3 дискретных разверток начинается считывание в режиме строчной щаговой развертки. Дискретная последовательность видеосигнала через блок 4 преобразования видеосигнала поступает в блок 5 задержки, который создает задержку на время развертки кадра р-н-. По окончании считывания «старого кадра он
стирается устройством 6 стирания. Затем открывается затвор 2, записывается и считывается «новое изображение. Одновременно с поступлением из блока 4 дискретной последовательности на вход блока/сравнения и анализа
поступают также из блока 5 задержки импульсы развертки «старого кадра. Производится их сравнение во временной области и определяется их временной сдвиг. Сигнал рассогласования -поступает на индикатор 8 обнаружения и далее на видеоконтрольное устройство 9. От блока W синхронизации поступают сигналы синхронизации на блоки устройства для их временного сопряжения. Перед затвором 2 ставится оптическая
система //.
При считывании неподвижных объектов импульсы рассогл-асования не вырабатываются, а при наличии движущихся объектов (С на фиг. 3) вырабатывается импульс рассогласования «в (фиг. 4), характеризующий величину перемещения объекта «С в пространстве за время между двумя кадрами. В частности, ширина импульса рассогласования может быть легко пересчитана в скорость, а количество импульсов щаговой развертки, поступающих в блок 4 преобразования видеосигнала, соответствует гео.метрическим размерам объекта анализа (поиска) вдоль строки. Наблюдение и распознавание только движущегося объекта производится на визуальном
контрольном устройстве 9 с помощью которого
;пульсы рассогласования, соответствующие ско:pocTiH перемещения объекта и его геометрическим характеристикам во втором измерении (по второй координате). Для этого блок 7 сравнения и анализа составляется, например, из матрицы регистров (ячеек) памяти и сравнения, число столбцов которой соответствует т - числу щагов строчной развертки, а число п - числу строк развертки в кадре. Каждой из возможных импульсов матрицы видеосигналов, направляется для записи и сравнения только в «свой регистр (их число равно т-п - произведению числа шагов развертки на количество строк) и на выходе блока 7 сравнения и анализа, таким образом, будут получаться импульсы рассогласования как по щаговой развертке вдоль строки (как это показано на фиг. 4), так и по столбцам, т. е. между строкам.. Это дает возможность следить за направлением движущегося объекта в двух измерениях (координатах). В отдельных случаях (например, обнаружение перемещающихся объектов на местности) нет необходимости иметь .мйтрицы регистров. В этом случае достаточно иметь устройства, реализующие способ построчного выделения подвижных объектов.
Предмет изобретения
1. Способ выделения динамических объектов из заданной совокупности, при котором анализируемое изображение предварительно записывают на фотокатод передающей телевизионной трубки с памятью, отличающийся тем, что, с целью автоматического определения геометрических и динамических параметров объектов, перемещающихся с различными скоростями на фоне стационарных или слабо флуктуирующих, записанное на телевизионной трубке изображение оптически изолируют от реального изо-бражбния анализируемой совокупности объектов, хранят на этой трубке в течение времени, определяемого диапазоном возможных динамических характеристик объектов поиска, далее считывают в режиме щаговой развертки с одновременным стиранием, задерживают полученный видеосигнал на время развертки одного кадра изображения, повторяют запись и считывание следующего кадра изображения анализируемой -совокупности, сравнивают по строкам и столбцам считывае.мые дискретные сигналы с задержанными и по величине временного рассогласования судят о параметрах перемещения динамических (подвижных) объектов, а по общему числу импульсов рассогласования - о их геометрических характеристиках.
2. Способ по п. 1, отличающийся тем, что, с целью индикации и визуального контроля динамических объектов, разностные сигналы от ряда идентичных датчиков при помош,и имеющихся каналов связи связывают в систему зонального обнаружения динамических объектов и подают на индикатор (сигнализатор) и видеоконтрольное устройство, индицирующее местонахождение динамического объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОБСЛЕДОВАНИЯ НАРАМЕТРОВ СОВОКУПНОСТИОБЪЕКТОВ | 1971 |
|
SU322861A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ КОМПЕНСАТОРА СКОРОСТНОГО СМАЗА ИЗОБРАЖЕНИЯ | 1973 |
|
SU373630A1 |
| Устройство для считывания и определения параметров движения констрастного изображения | 1976 |
|
SU717796A1 |
| Устройство для считывания информации | 1984 |
|
SU1183995A1 |
| Селектор сигналов движущихся объектов | 1975 |
|
SU555357A1 |
| Способ фотоэлектрического преобразования и устройство для его осуществления | 1981 |
|
SU1092754A1 |
| Способ опознавания изображений объектов | 1971 |
|
SU446087A1 |
| Способ преобразования оптического изображения в видеосигнал | 1984 |
|
SU1285622A1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ | 1971 |
|
SU311423A1 |
| Блок регистрации рентгено-телевизионного устройства | 1974 |
|
SU534675A1 |
«iUj/t)
