Изобретение предназначено для использования в сейсморазведочных работах при поисках и разведке нефтяных и газовых месторождений.
Известно устройство для определения и ввода кинел1атических поправок. Это устройство позволяет производить коррекцию кинематических поправок при помощи программируемого переключения выходов криволинейного параллельного сумматора на обндий выход. Тем самым составляется одна общая сводная трасса из следующих друг за другом кусков трасс криволинейной суммоленты. На каждом отрезке времени в составную трассу входит отрезок той трассы суммоленты, который соответствует центру разрастания полезной волны. Это обеспечивает на составной трассе повсеместное синфазное суммирование полезных волн, т. е. коррекцию кинематических поправок и суммирование сигналов с ноправкамИ.
Однако, в этом устройстве не раскрыт блок программирования, управляющий переключением выходов криволинейного параллельного сумматора.
Цель изобретения - обеспечение переключения в требуемой последовательности вы.ходов криволинейного параллельного сумматора для коррекции кинематических поправок и суммирования сигналов с поправками.
Это особенно необходимо при обработке материалов ОГТ, где знание поправок а основе априорных данных не является достаточно точным, и для эффективного применения ОГТ
требуется коррекция поправок.
Это достигается тем, что носитель ирограммы и.меет два датчика, один )13 которых запоминает время необходимого очередного переключения выходов криволинейного нараллельного сумматора, а второй - необходимость изменения направления переключения. Выходы первого датчика подключе} ы к первой группе входов схемы сравнения, источник сигналов текущего времени через счетЧик подсоединен ко второй группе входов схемы сравнения, один из выходов схемы сравнения подсоединен к механизму перемещения иосителя программы, второй выход схемы сравнения подан на счетный вход реверсивного счетчика, к знаковому входу которого подсоединен второй датчик программы, выходы реверсивного счетчика через дещифратор подсоединены к управляющим входа. ключей, коммутирующих выходы.
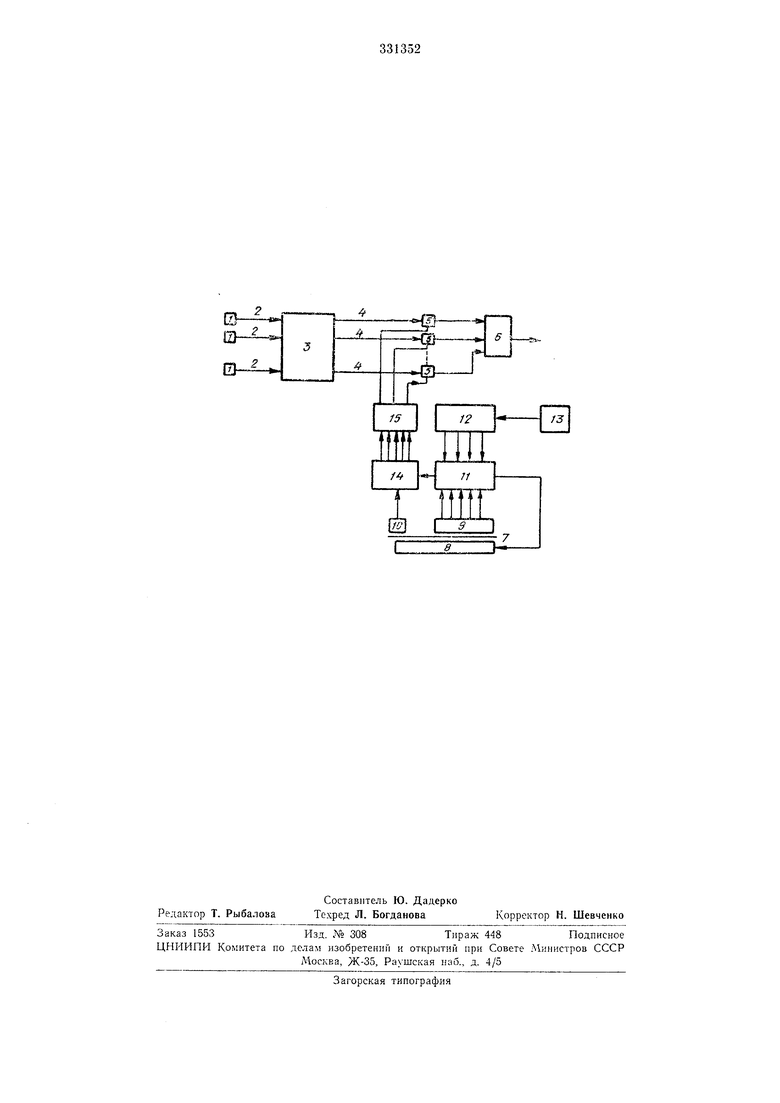
На чертеже представлена блок-схема устройства, где: 1 сточник сигналов /, входы криволинейного параллельного сумматора 2, криволинейный параллельный сумматор 3, выходы 4 криволинейного параллельного сумпроараммы, механизм 8 перемещения носителя программы, первый датчик 9 программы, второй датчик 10 программы, схема Л сравнения, счетчик 12 текущего времени, источник 13 сигналов текущего времени, реверсивный счетчик 14, дешифратор 15.
Устройство работает следующим о-бразом.
Источиик 1 сигналов, выдающий колебания, в которые уже введены предварительные грубые кинематические поправки, подключен к входам 2 криволинейного параллельного су.мматора 3. На выходах 4 этого сумматора одновременно появляются в виде электрических напряжений су.ммотрассы, соответствующие различным направлениям суммирования, т. е. трассы криволинейной суммоленты. Направлениями суммирования в криволинейном нараллельном сумматоре при коррекции поправок ОГТ лучше всего выбирать пучок парабол положительной и отрицательной кривизны с разными стрелами прогибов. Выходы 4 сумматора 3 поочередно в необходимой последовательности подсоединяют к выходному блоку 6 через ключи 5, тем самым обеспечивая получение составной трассы и отрезков трасс криволинейной суммоленты.
Блок программирования управляет переключением ключей 5.
В него входит носитель 7 программы (например, перфолента), который может перемещаться при помощи механизма 5 перемещения. Датчики 9 и 10 программы при неподвижном носителе программы запоминают содержащуюся в носителе информацию. Первый датчик 9 запоминает время, когда необходимо сделать очередное переключение выходов сумматоров, второй датчик 10 запоминает, нужно ли при очередном переключенш изменить его направление по сравнению с предыдущим. В качестве датчиков могут быть использованы, например, фотосопротивления, освещаемые источником света через отверстия в перфоленте. В этом случае система отверстий для первого датчика дает время ожидаемого переключения, записанное, например, в двоичном коде. Для второго датчика необходимо одно отверстие каждый раз, когда следует из енить направление переключения выходов сумматора (от больших номеров к меньшим и наоборот).
Как только носитель 7 программы (например, парфолента) перемещается механизмом 8 в очередную позицию, второй датчик W при наличии отверстия подает на знаковый вход реверсивного счетчика 14 импульс и меняет наиравление счета этого счетчика (вперед или назад); но при этом число, стоящее на счетчике 14, еще не изменяется. Датчик 9 запоминает, например, в двоичном коде, ожидаемое время очередного переключения в виде кода числа; этот код поступает в схему 11 сравнения, которая может
представлять сойой систему схем совпадения. В схеме совпадения И код числа ожидаемого времени переключения сравнивается с кодом текуп его времени, поступающим из счетчика 12 текущего времени, к входу которого подсоединен датчик 13 текущего времени; этот датчик может образовывать импульсы текущего времени от стабилизированного генератора или от марок времени, имеюихихся
иа носителе сейсмической информации (марки времени на магнитной ленте).
Когда текущее время равно ожидаемому, схема 11 сравнения выдает импульс на механизм 8 перемещения носителя 7 программы и перем.ещает носитель в следчющую позицию. В.месте с тем импульс с выхода схемы 11 поступает на счетный вход реверсизного счетчика 14 и изменяет на едииицу храиящееся в нем число. Выходы реверсивного
счетчика 14 поданы на дешифратор 15, который всегда имеет сигнал только на одном выходе, по номеру соответствующему числу, записанному в счетчике.
Выходы дешифратора соединены с управляющими входами ключей 5. Поскольку сигнал есть только на одиом выходе, следовательно, всегда из всех ключей 5 открыт только один. При изменении числа, заиисаниого в реверсивном счетчике 14 на единицу, которое происходит каждый раз, когда ожидаемое по программе время переключения совпадает с текущим времене.м, открытый ключ 5 закрывается и открывается соседний, с большим или меньшим номером.
Предмет и з о б ) е т е и и и
Устройство для коррекции кинематических иопра1вок, содержащее параллельный сумматор ио криволииейным осям, ключ-и, выходной блок и блок ирограммирования с двумя датчиками программы, отличающееся тем, что, с целью повышения быстродействия ири переключе.нии выходов параллельного сумматора в требуемой последовательности, в нем выходы первого датчика программы, запоминающего очередное требуемое время переключения, иодключены к первой группе входов схемы сравиения, ко второй группе входов которой через счетчик иодключен источник сигналов текущего времени, при этом один из выходов схемы сравнения включен на счет, ный вход реверсивного счетчика, к знаковому входу которого подсоединен второй датчик программы, хранящий информацию о необходимости перемены направления счета, а вы.ходы реверсивного счетчика через дешифратор соединены с управляющими входами ключей, коммутирующих выходы параллельного сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ КИНЕМАТИЧЕСКИХ ПОПРАВОК | 1972 |
|
SU332401A1 |
| УСТРОЙСТВО для ПАРАЛЛЕЛЬНОГО ВВОДА КИНЕМАТИЧЕСКИХ ПОПРАВОК | 1970 |
|
SU283615A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1965 |
|
SU171171A1 |
| УСТРОЙСТВО СЧИТЫВАНИЯ и ПРЕОБРАЗОВАНИЯ | 1964 |
|
SU164718A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯДЛЯ ВНУТРИХОЗЯЙСТВЕННОГО УЧАСТКААВТОМАТИЗИРОВАННОЙ ОРОСИТЕЛЬНОЙ СИСТЕМЫ | 1971 |
|
SU424536A1 |
| Позиционный электропривод | 1983 |
|
SU1124255A1 |
| СПОСОБ ОБРАБОТКИ СЕЙСМИЧЕСКОЙ ИНФОРМАЦИИ ПО ДАННЫМ ОДНОКРАТНОГО ПРОСЛЕЖИВАНИЯ | 1972 |
|
SU342155A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЕ ЧАСЫ | 2003 |
|
RU2244953C1 |
| Система автоматической стабилизации градиента температур при прокатке узких полос на реверсивном стане | 1980 |
|
SU969346A1 |