Из,весте« способ определения реактивностей X а -я X оинхронщой машины путем измерения количества электричества, накопле нного в группе катушек якаряой обмотки с «а., магничивающей силой по соответствующей оси при отключении их от источника постоянного тока и одновременном коротком замыкании.
Цель изобретения - повышение точности определения реакти;В1ностей при насыщенной магнитной цепи и «агрузке машины. Это достигается тем, что отключение от источника постоявного тока и короткое замыкание ука. заниой группы катушек производят при подключенной к источнику ПОСТОЯННОГО тока второй группе катущак, создающих намагничивающую силу по другой оси.
На фиг. 1 представлена приицкпиальная схема, реализук щая предложенный способ; на фиг. 2 - график определения сивхрояных реактивностей и угла сдвига ротора для задаинОГО режима.
Трехфазную статор-ную об-мотку 1 (см. фиг. 1) подразделяют на две группы , каждая из которых независимо друг от друга питается от источнико В 4 vi 5 постояниого тока соответственно. Ключ 6, регистрирующий прибор 7, шунт 8 и токоограиичивающее сопротивление 9 неО(бходимы для регистрации прОЦесса затухавдя тока в цепи измерений.
Обмотки 2 и 5 создают по-токи в перпендикулярных Направлениях. В зависимости от соотношения токов, арапускаемых лоэтим обмоткам, можно создать результирующий поток нужной величины под любым углом к оси d и тем самым определить синхронные реактивности в зависимости от насыщающего действия результирующего нотока в машиие. При
определении продольной реактивности Х,
ось ротора устанавливают по направлению равнодействующей обмотки 3 и закрепляют в этом положении. При определении поперечной, реактивности Ху ротор «необходимо повернуть на 90 эл. град. Закоротив ключом 6 обмотку 5, регистрирующим прибором 7 через шунт 8 записывают процесс затухания тока .в цепи.
Для предохранения источника 5 от токов короткого замыкания в схеме предусмотрено токоограничивающее сопротивлелие 9. Обмотка возбуждения 10 закорочена. При этом
R j
kdt
при /2 COnst,(1)
х
2/я
где W - синхронная угловая частота;
Если продольная ось рбтора (ось d) совпадает с напразлеНИем результирующего потока о-бмотки 3 (см. фиг. i), то Х - . Е-с-пи же прад-ольная ось ротора находится з положенин, п&рпендикуляр-НОм иаправлен-ию результирующего потока обмотки 3, то Х Х
/Переход от постоянных ток-ов /2 и /з к действующим значениям результирующего продольного .тока / и ПОперечйого тока /
трехфазной вращающейся машины можно осуществить согласно следующим выражаниЯм:
при определении X
/ /4/.
(2)
/,
При определен} X
/.
(3)
У/3.
Задаваясь различными значениями то«ов, ожио от1редел«ть семейства кривых Х f
Л-
(d .. ) (fd . ). позволяющие анализироватьсостояние машитопровода машииыпри тех или иных значениях составлиадих результирующего потока по продольной и поперечной осям. KaiK видно из выражения (1), для определения реактивностей Х К X
оо
еобходимо знать j idt-площадь, ограниценную кривой затухания тока и осью вре-мени. Обработка осциллограмм, особенно при олресцелении реактивностей в широком диапазоне значений, очень трудоемка, поэтому значение иитеграла определяют при помощи флюксметра или интегрирующего устройства.
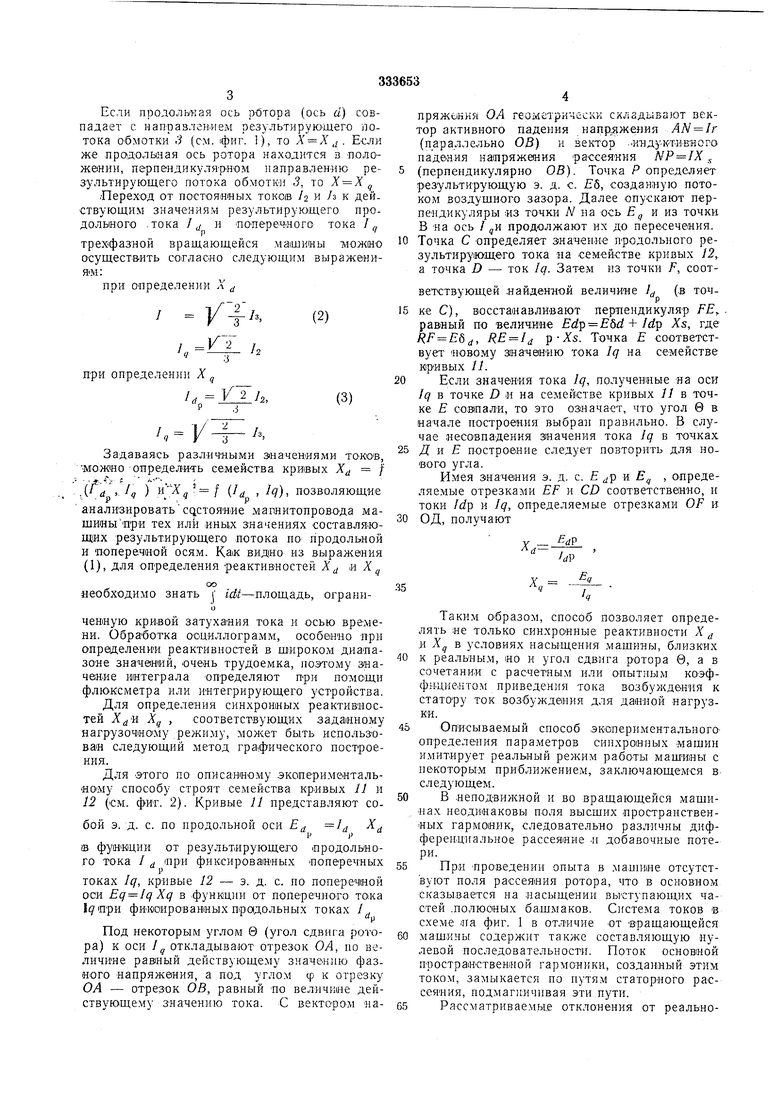
Для определения синхронных реактивиостей и Хд , соответствующих заданному нагрузочному режиму, может быть использован следующий метод графического построения.
ЭТОГО по описанному зкопериментальнаму способу строят семейства кривых 11 и 12 (см. фит. 2). Кривые 11 представляют собой э. д. с. по продольной оси Е -1 Х
рJ
IB функции от результирующего продольного тока / при фиксированных поперечных
токах Iq, кривые 12 - э. д. с. по поперечной оси Eq IqXq в функции от поцеречного то:ка 1(7При фшссированных продольных токах /
Под некоторым углом в (угол сдвига ротора) к оси Iд откладывают отрезок ОА, но величине равный действующему значению фазного напряжения, а под углом ф к отрезку О А - отрезок ОВ, равный по величине действующему значению тока. С вектором напряжонкя ОА геометрически складывают вектор активного падения напр яжения AN Ir (параллельно OS) и вектор ..индуктивного падения напряжения рассеяния NP - JX
(перпендикулярно ОВ). Точка Р определяет результирующую э. д. с. 6, созданную потоком воздушного зазора. Далее опускают перпендикуляры «3 точки Л/ на ось f и из точки В на ось дМ продолжают их до пересечения.
Точка С определяет значен.ие продольного результиру1К щего тока на семействе кривых /2,. а точка D - ток Iq. Затем из точки F, соответствующей .найденной величине / (.в точке С), восстанавливают перпендикуляр FE равный по величине Edp-E5d + dp Xs, где , E d pXs. Точка E соответствует Новому значению тока Iq на се-мействе кривых 11.
Если значения тока Iq, полученные на оси Iq в точке D и на семействе кривых // в точке Е совпали, то это означает, что угол в в начале построения выбран правильно. В случае несовпадения з)начения тока Iq в точках
Д и построение следует повторить для нового угла.
Имея значения э. д. с. Е р и Е , определяемые отрезками EF и CD соответственно, и токи Idp и Iq, определяемые отрезками OF в
ОД, получают
аР
X,
IdV
- -7,
Таким Образом, спосо-б позволяет определять не только синхронные реактивности X И Хд в условиях насыщения ма.щины, близких
к реальным, но и угол сдвига ротора в, а в сочетании с расчетным или опытным коэффя.цие.нтом приведения тока возбуждения к статору ток возбуждения для данной нагрузки.
Описываемый способ экспериментальногоопределения параметров синхронных -машин имитирует реальный режим работы машины с некоторым приближением, заключающемся в следующем.
В .неподвижной и во вращающейся машинах неодинаковы поля высших пространственных гармоник, следовательно различны дифференциальное рассеяние .и добавочные потери.
При проведении опыта в .л аи1И1не отсутствуют ноля рассеяния ротора, что в основном сказывается на насыщении выступаю1цих частей .полюсных башмаков. Система токов в схеме «га фиг. 1 в отличие от вращающейся
машины содержит также составляющую нулевой последовательности. Поток основной Пространственной гармоники, созданный этим током, замыкается по путям статорного рассеяния, иодмагничивая эти пути.
го режима «евелики, и полученной погрешностью практически можно- .пренебречь.
Предмет и з о б р е т е в и я
Способ определения реактивностей Х я X д синхронной машины путем измерения количества электричества, нажопленного в группе катушек якорной обмотки с навдагаичивающей силой по соответствуюш,ей оси при отключе«ии их от источника постоянного тока и одновременном коротком замыкании, отличающийся тем, что, с целью повышения точности яри насыш,е1нной магнитной цепи и нагрузке машниы, отключение от источника постоянного тока и короткое замыкание указанной группы катушек производят при подключенной к )сточнику постоянного тока второй группе катушек, создающих намагничивающую силу по другой оси.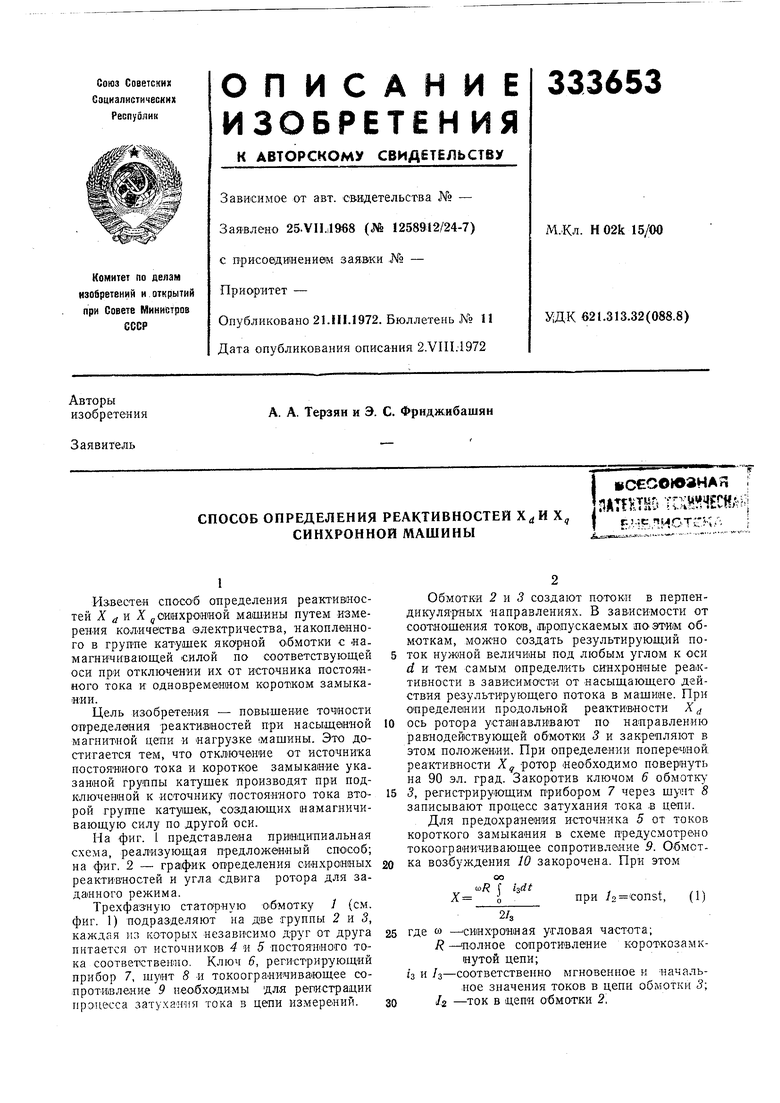

фуг./
Фиг-.2
