Свайиые вибропогружатели широко ирименяются при строительных работах. Практика эксплуатации и исследования этих маujiiii показали, однако, что почти во всех случаях эиергет ческие возлюжиости виброиогружателей используются далеко пе лучnjHM образом, что приводит к их большой энергоемкости, значительному весу и ограниченной погружаюп1,ей способности.
Рациональное изменение двух параметров вибропогружателя - частоты колебаний « и момента эксцентриков К - в процессе работы позволяет более полно использовать установочную мониюсть двигателя, увеличить скорость 11 гл бину погружения. Наиболее эффективными являются вибропогружатели с плавно изменяюн1импся параметрами, в частности с приводом от гидравлических двигателей. Однако возможность плавного регулирования паралтетров сама по себе не обеспечивает решения задачи. Изменение характеристик процесса по мере погружения сваи или оболочки требует вполне определенного в каждом конкретном случае изменения параметров погружателя. Это может быть выполнено с помощью автоматической системы регулирования.
ствии с изменяюпдимися условиями погружения. Так, например, известен способ регулирования параметров вибратора при по.мощи оптимизатора с программным устройство.м. Но этот способ сложен и трудно реализуется.
Предлагаемый способ дает возможность максимально использовать установочную дюшность двигателя и исключает «опрокидывание его при переходных режимах. С этой целью режим работы вибропогружателя регулируют по отклонению величины потребляемой мощностп от заданного номннала путем настройки нескольких иараметров вибрации, например момента эксцентриков и частоты их , в завис мости от характеристик процесса погружения.
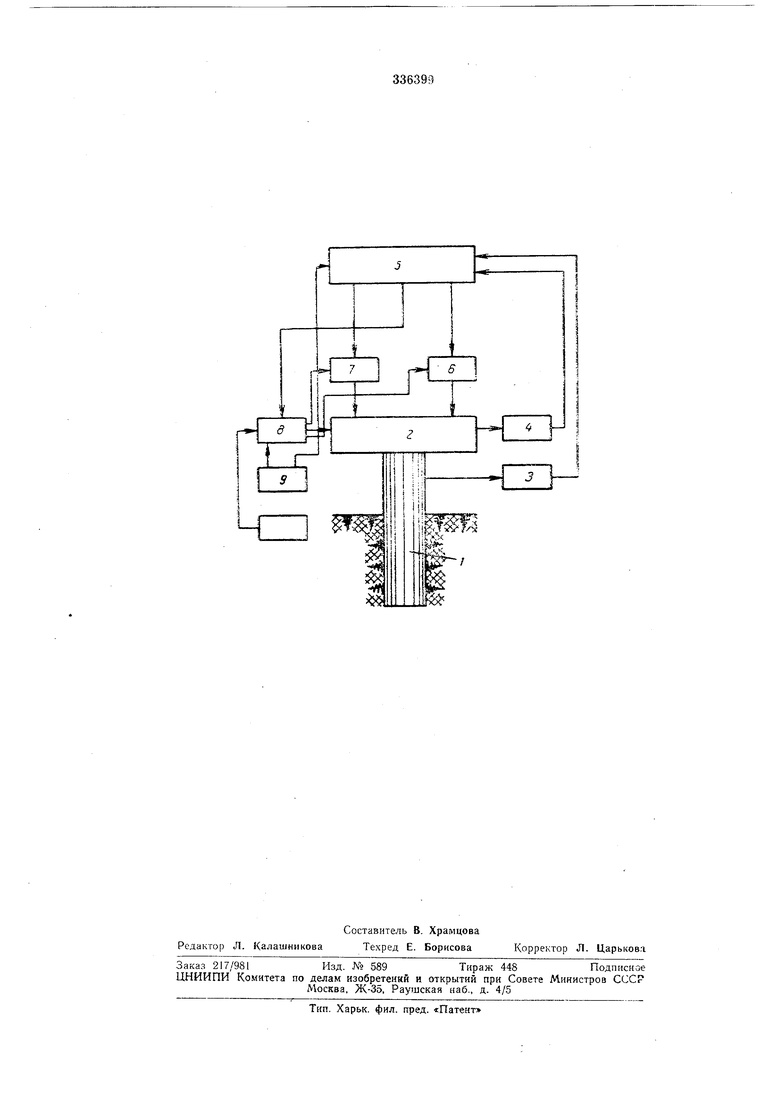
На чертеже изображена блок-схема управления режимом работы свайного вибропогружателя, пояспяюп|,ая предлагаемый способ.
Автоматическое регулирование параметров вибропогружателя во всех случаях должно быть основано на принципе поддержапия потребляемой машипой мош,ностп на максимально допусти1 юм для данного двигателя уровне. При этом параметры К и 113А1епяют, исходя из того фактора, что при данполг расходе мощности наибольший коэффициент ее полезного нсиользова1П1я для погружения обеспечивается при относительно паиболее
высоких 3 1ачениях момента эксцентриков /( и соответствующем по мощности значении частоты колебаний ел Это следует нз рассмотрения иолученных зависимостей скорости иогруження от частоты колебаний j нри ностояниых момеитах /С и уровня мощности А/. Аналогичные зависимости, соответствующие известным экспериментальным данным, получены для самых различных грунтов, типов свай, оболочек и вибропогружателей.
Таким образом потребляемую мощность .поддерживать на заданных уровнях следует так, чтобы по мере иогружеиия сваи момент эксцентриков К стремился к максималы-юй .величине, а частота колебаний (вращеиия валов эксцентриков) подстраивалась под текущее зпачение момента и обеспечивала заданный расход мощности. При этом будет автоматически обеспечено наиболее рациональное расходование мощности вибропогружателя и максимальное зпачение скорости погружения и достигаемой глубины.
Диапазоны изменения параметров характеризуются следующими пределами:
Л.МИ5, К -;J AMIKC . WVHH U Ч и,,д,;с .
Кроме того, иреднолагается возможиость кратковре.менного безонасного превышения номинала мощности в отдельных случаях при возникновении такой необходимости.
Запуск системы производится при значениях /Сми1г и «сред Если заиуск произведен .после наращивания очередной секции оболочек, и срыва системы с грунта не нроизошло, то необходимо постепенно увеличивать w до рредела, ограничениого номиналом мощности. Если при скорости вращения - „а: срыв также не произошел, то следует медленно увеличивать А до значений, определяемых номиналом мощности или началом срыва. Если срыв не произошел и при значении Л , ..соответствующем номиналу мощности, то следует выдержать данный режим во времени.
После того как в одном из расс.мотрепных случаев срыв произошел, процесс переходит во вторую стадию, что сопровождается нояв,лением скорости погружения и скачкообразным ростом мощности до значений, которые могут превысить юминальные. Поэтому после срыва необходимо сразу уменьшить частоту для снижения мощности.
После установления номинальной мощности оптимальный режим вибропогружения достигается постепенным увеличением /С до максимума нри варьировании частоты для поддержания мощности на номинале.
Предлагаемый способ может быть реализовав с помощью системы автоматического регулирования по отклонению. Свая / вводится в режим колебаний установлен 1ы.м па
ней вибропогружателем 2. Величина мгновенного ускорения X, скорости X и скорост ; погружения сваи V регистрируется датчиком динамической перегрузки 3, а мощность Л ,
потребляемая вибропогружателем, контролируется датчиком мощности 4. Сигналы с датчиков поступают в автоматическое устройство 5 регулирования параметров вибропогружателя, которое вырабатывает сигналы управления, постунающие па привод 6 изменения частоты вращения двигателей вибропогружателя и привод 7 изменения величины момента эксцентриков К. Управляющие воздействия с приводов поступают в вибропогружатель 2, изменяя его угловую скорость вращения и MOMefiT эксцентриков /С.
Кроме того, автоматическое устройство 5 управляет блоком выключения питания 8 при ,аварийной ситуации и в моменты, предусмотрепные алгоритмом. Блок выключения нита«ия 8 связал с вибропогрул ателем 2 и приводами. Цеитрализованное управление системой автоматического регулирования осуществляется с пульта 9.
в систему включены также блоки, следящие- за динамическими перегрузками сван или вибратора и за скоростью погружения, что необходимо для выключения системы через определенное время, прошедшее с момента появления опасных перегрузок.
Реализация предлагаемого способа позволит сократить время погружения свай, увеличить глубипу погружения благодаря рациональному использованию мощности, облегчит запуск вибропогружателей, исключит аварийные ситуации.
Предмет изобретения
1. Способ управления режимом работы свайного вибропогружателя путем регулирования вибратора в соответствии с изменяющимися условиями погружения, отличающийся тем,
что, с целью максимального использования установочной мощности двигателя и предотвращения при переходных режимах его «опрокидывания, режим работы вибропогружателя регулируют по отклонению от заданного
поминала величины потребляемой мощности путем настройки нескольких параметров вибрации, например момента эксцентриков и частоты их вращения, в зависимости от характеристик процесса погружения.
2. Способ по п. I, отличающийся тем, что, с целью повышения долговечности вибропогружателя и предотвращения разрушения сваи, величину динамических нагрузок ограничивают с помощью блока слежения по перегрузкам, связанного с датчиками перегрузок и приводом управления регуляторов режимов вибрации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ СВАЙНОГО ВИБРОПОГРУЖАТЕЛЯ | 1971 |
|
SU303397A1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ СВАЙНОГО ВИБРОПОГРУЖАТЕЛЯ | 1965 |
|
SU177350A1 |
| УНИВЕРСАЛЬНОЕ ВДАВЛИВАЮЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2388868C1 |
| Устройство управления свайным вибропогружателем | 1986 |
|
SU1432139A1 |
| ВИБРОПОГРУЖАТЕЛЬ С РЕГУЛИРУЕМЫМ СТАТИЧЕСКИМ МОМЕНТОМ | 2004 |
|
RU2260655C1 |
| ВИБРАЦИОННАЯ ПЛОЩАДКА | 1969 |
|
SU255815A1 |
| Вибропогружатель с регулируемым статическим моментом | 1991 |
|
SU1828479A3 |
| УСТРОЙСТВО ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2003 |
|
RU2248431C1 |
| ВИБРОПОГРУЖАТЕЛЬ | 1995 |
|
RU2098557C1 |
| Вибровозбудитель | 1991 |
|
SU1787050A3 |