4
00
N3
00
со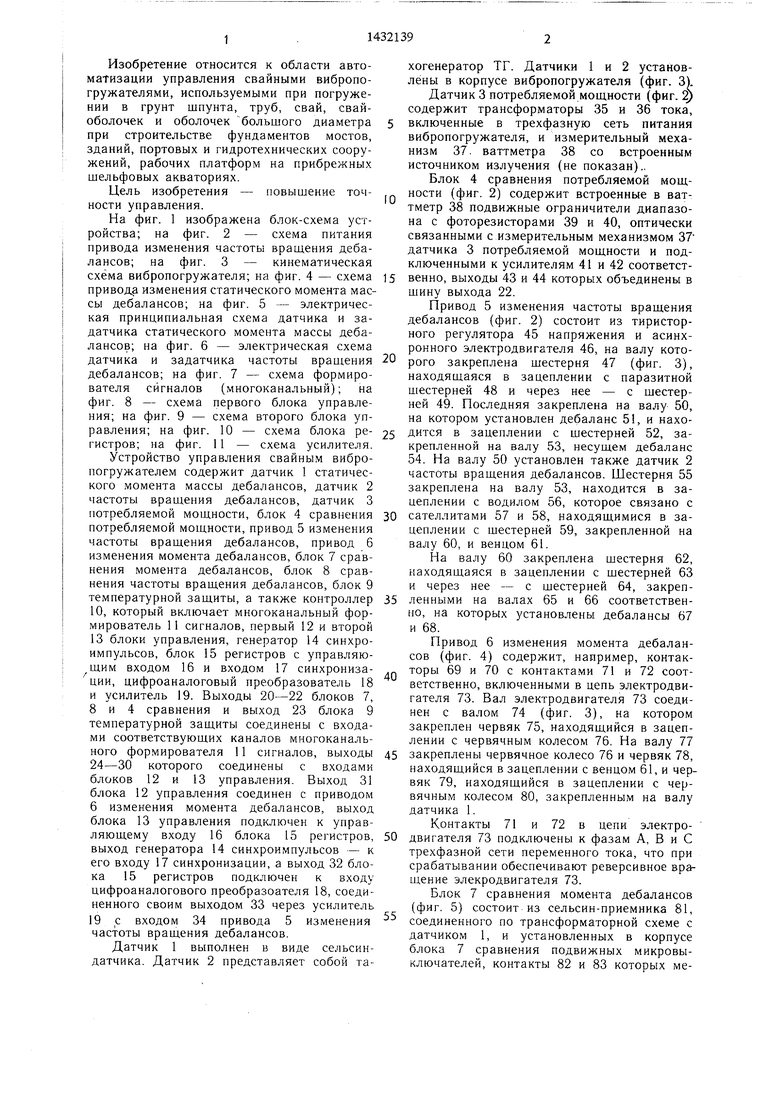
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления вибропогружателем | 1983 |
|
SU1157165A1 |
| Устройство для управления группой N статических преобразователей частоты,включенных параллельно по входу и выходу | 1986 |
|
SU1388973A1 |
| Регулятор реактивной мощности | 1985 |
|
SU1319010A1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Устройство для управления автоматическими линиями | 1983 |
|
SU1149223A1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| Цифровой электропривод | 1982 |
|
SU1050077A1 |
| ИМИТАТОР ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 1994 |
|
RU2094815C1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |

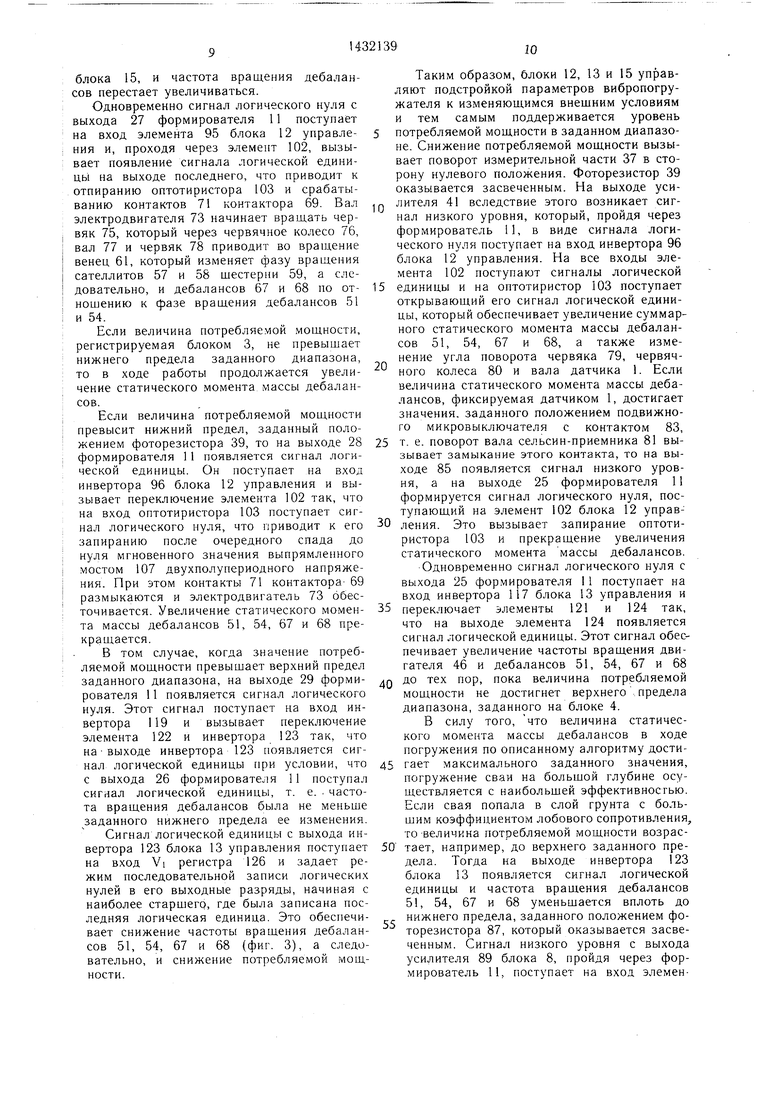
Изобретение относится к автоматизации управления свайными вибропогружателями, используемыми при погружении в грунт шпунта, труб, свай, свай-оболочек и оболочек большого диаметра при строительстве фундаментов мостов, зданий, портовых и гидротехнических сооружений, рабочих платформ на прибрежных шельфовых акваториях, и позволяет повысить точность управления. Устройство содержит датчик 1 статического момента массы дебалансов, датчик 2 частоты враш,ения дебалансов, датчик 3 потребляемой мощности, блок 4 сравнения потребляемой мощности, привод 5 изменения частоты вращения дебалансов, привод 6 изменения момента дебалансов, блок 7 сравнения момента дебалансов, блок 8 сравнения частоты вращения дебалансов, блок 9 температурной защиты, контроллер 10, который включает многоканальный формирователь 11 сигналов, два блока 12 и 13 управления, генератор 14 синхроимпульсов, блок 15 регистров с входами 16 и 17, цифроаналоговый преобразователь 18, усилитель 19. 11 ил. i (Л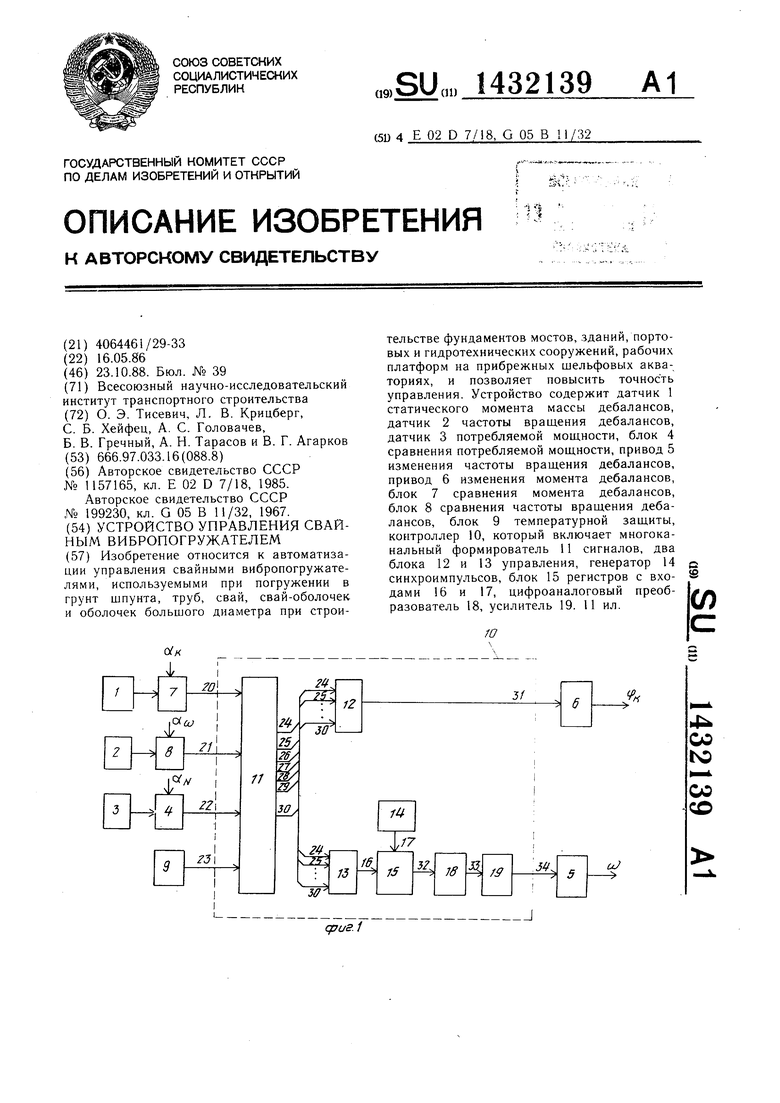
сриг.1
.J
Изобретение относится к области авто- MatH3auHH управления свайными вибропогружателями, используемыми при погружении в грунт шпунта, труб, свай, свай- оболочек и оболочек большого диаметра при строительстве фундаментов мостов, зданий, портовых и гидротехнических сооружений, рабочих платформ на прибрежных шельфовых акваториях.
Цель изобретения - повышение точности управления.
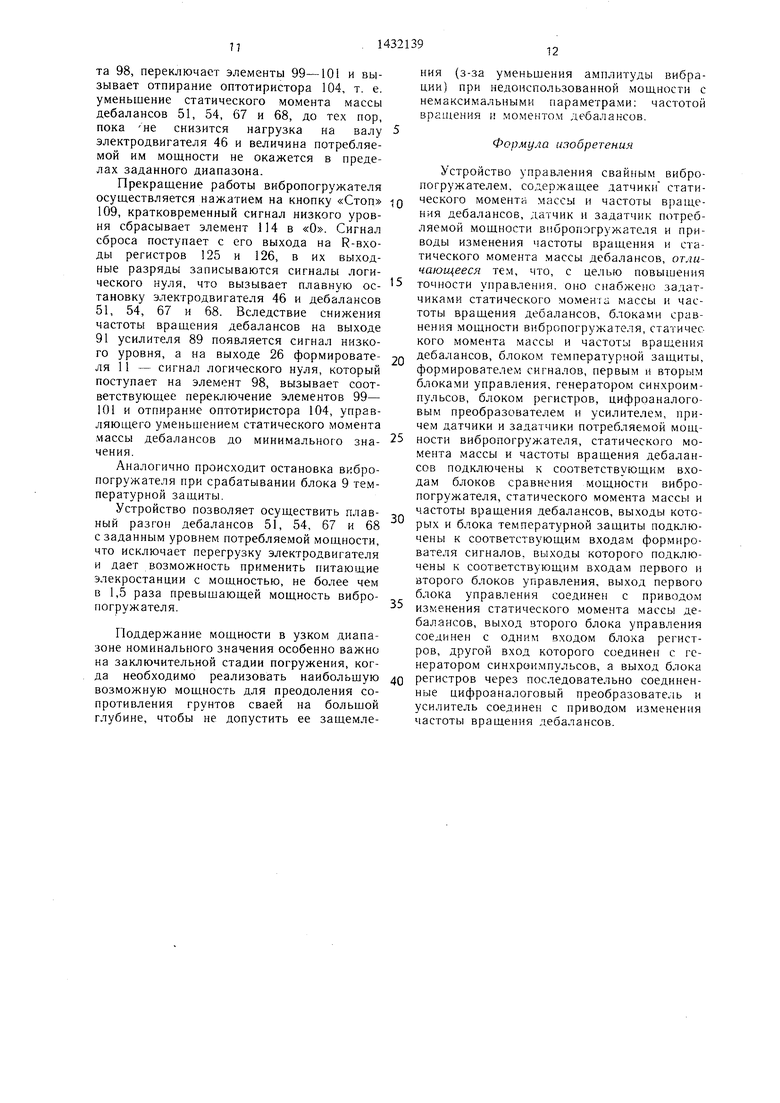
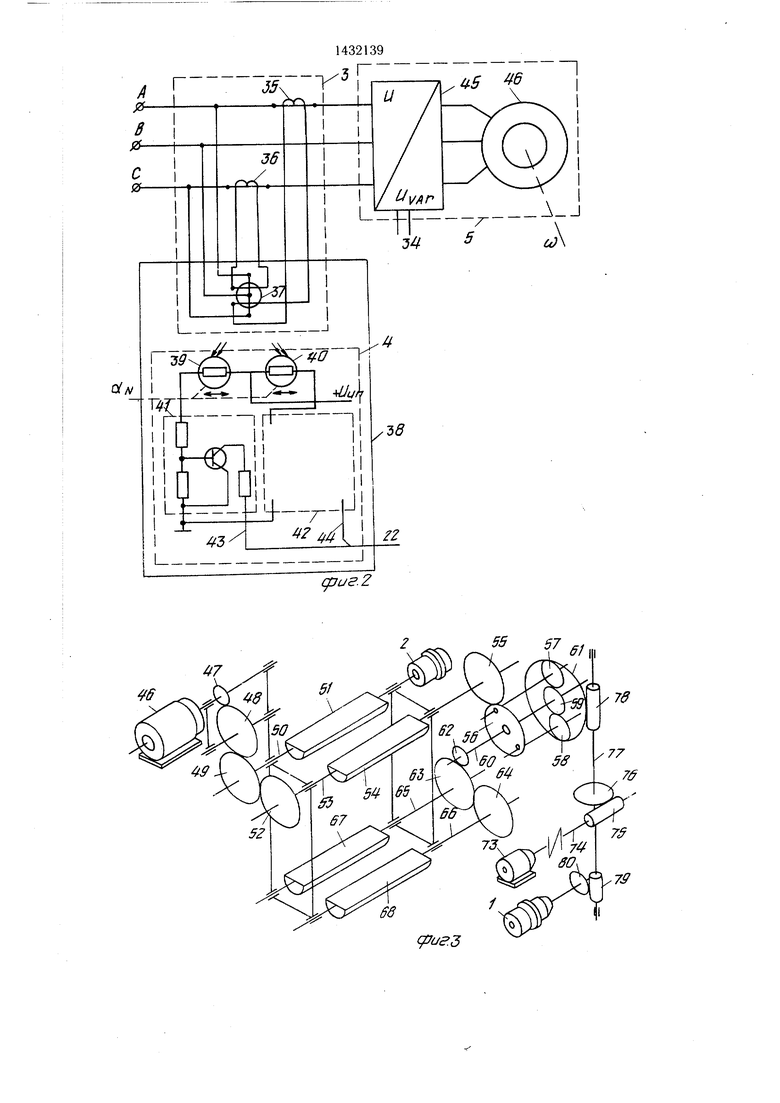
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - схема питания привода изменения частоты враш,ения деба- лансов; на фиг. 3 - кинематическая схема вибропогружателя; на фиг. 4 - схема привода изменения статического момента массы дебалансов; на фиг. 5 - электрическая принципиальная схема датчика и за- датчика статического момента массы дебалансов; на фиг. 6 - электрическая схема датчика и задатчика частоты врашения дебалансов; на фиг. 7 - схема формирователя сигналов (многоканальный); на фиг. 8 - схема первого блока управления; на фиг. 9 - схема второго блока управления; на фиг. 10 - схема блока ре- гистров; на фиг. 11 - схема усилителя. Устройство управления свайным вибропогружателем содержит датчик 1 статического момента массы дебалансов, датчик 2 частоты вращения дебалансов, датчик 3 потребляемой мощности, блок 4 сравнения потребляемой мощности, привод 5 изменения частоты врашения дебалансов, привод 6 изменения момента дебалансов, блок 7 сравнения момента дебалансов, блок 8 сравнения частоты вращения дебалансов, блок 9 температурной защиты, а также контроллер 10, который включает многоканальный формирователь 11 сигналов, первый 12 и второй 13 блоки управления, генератор 14 синхроимпульсов, блок 15 регистров с управляю- ,шим входом 16 и входом 17 синхрониза- ции, цифроаналоговый преобразователь 18 и усилитель 19. Выходы 20-22 блоков 7, 8 и 4 сравнения и выход 23 блока 9 температурной защиты соединены с входами соответствующих каналов многоканального формирователя 11 сигналов, выходы 24-30 которого соединены с входами блоков 12 и 13 управления. Выход 31 блока 12 управления соединен с приводом б изменения момента дебалансов, выход блока 13 управления подключен к управляющему входу 16 блока 15 регистров, выход генератора 14 синхроимпульсов - к его входу 17 синхронизации, а выход 32 блока 15 регистров подключен к входу цифроаналогового преобразоателя 18, соединенного своим выходом 33 через усилитель
19 с входом 34 привода 5 изменения частоты вращения дебалансов.
Датчик 1 выполнен в виде сельсин- датчика. Датчик 2 представляет собой та0
5
5 0 5 О 35 45 50
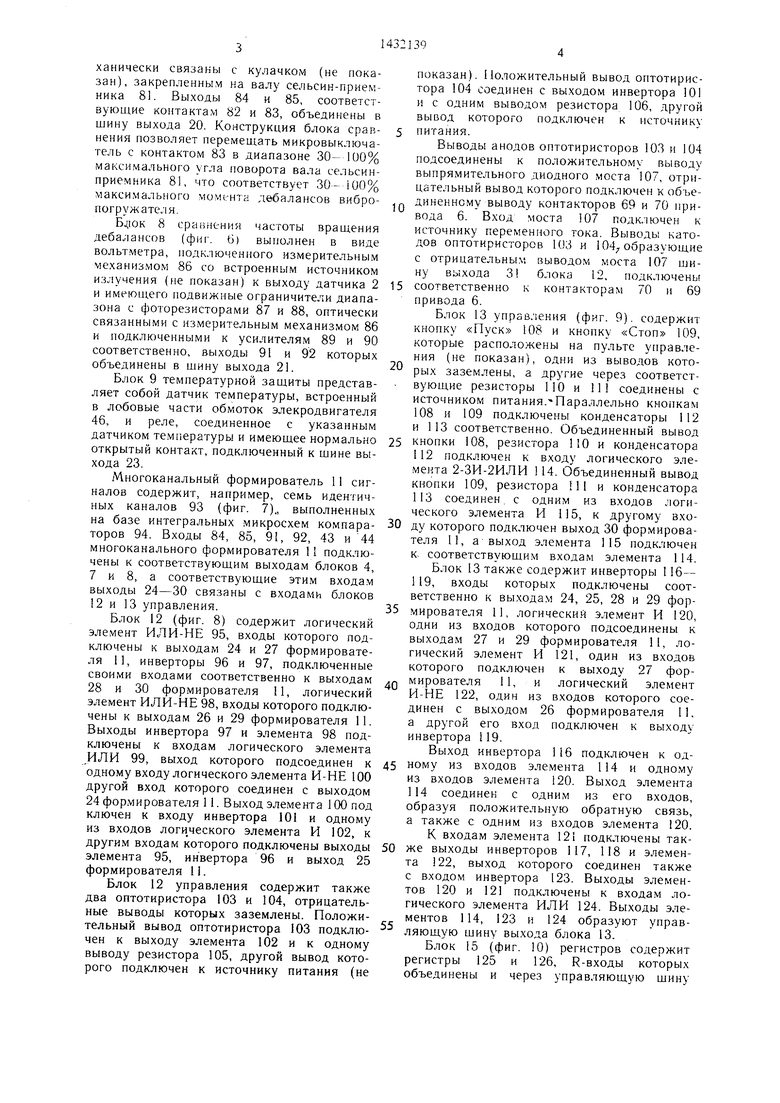
хогенератор ТГ. Датчики 1 и 2 установлены в корпусе вибропогружателя (фиг. 3). Датчик 3 потребляемой мощности (фиг. 2) содержит трансформаторы 35 и 36 тока, включенные в трехфазную сеть питания вибропогружателя, и измерительный механизм 37. ваттметра 38 со встроенным источником излучения (не показан).,
Блок 4 сравнения потребляемой мощности (фиг. 2) содержит встроенные в ваттметр 38 подвижные ограничители диапазона с фоторезисторами 39 и 40, оптически связанными с измерительным механизмом 37 датчика 3 потребляемой мощности и подключенными к усилителям 41 и 42 соответственно, выходы 43 и 44 которых объединены в шину выхода 22.
Привод 5 изменения частоты вращения дебалансов (фиг. 2) состоит из тиристор- ного регулятора 45 напряжения и асинхронного электродвигателя 46, на валу которого закреплена шестерня 47 (фиг. 3), находящаяся в зацеплении с паразитной шестерней 48 и через нее - с шестерней 49. Последняя закреплена на валу 50, на котором установлен дебаланс 51, и находится в зацеплении с шестерней 52, закрепленной на валу 53, несущем дебаланс 54. На валу 50 установлен также датчик 2 частоты врашения дебалансов. Шестерня 55 закреплена на валу 53, находится в зацеплении с водилом 56, которое связано с сателлитами 57 и 58, находящимися в зацеплении с шестерней 59, закрепленной на валу 60, и венцом 61.
На валу 60 закреплена шестерня 62, находящаяся в зацеплении с шестерней 63 и через нее - с шестерней 64, закрепленными на валах 65 и 66 соответственно, на которых установлены дебалансы 67 и 68.
Привод 6 изменения момента дебалансов (фиг. 4) содержит, например, контакторы 69 и 70 с контактами 71 и 72 соответственно, включенными в цепь электродвигателя 73. Вал электродвигателя 73 соединен с валом 74 (фиг. 3), на котором закреплен червяк 75, находящийся в зацеплении с червячным колесом 76. На валу 77 закреплены червячное колесо 76 и червяк 78, находящийся в зацеплении с венцом 61, и червяк 79, находящийся в зацеплении с червячным колесом 80, закрепленным на валу датчика 1.
Контакты 71 и 72 в цепи электродвигателя 73 подключены к фазам А, В и С трехфазной сети переменного тока, что при срабатывании обеспечивают реверсивное вращение элекродвигателя 73.
Блок 7 сравнения момента дебалансов (фиг. 5) состоит из сельсин-приемника 81, соединенного по трансформаторной схеме с датчиком 1, и установленных в корпусе блока 7 сравнения подвижных микровыключателей, контакты 82 и 83 которых механически связаны с кулачком (не показан), закрепленным на валу сельсин-приемника 81. Выходы 84 и 85, соответствующие контактам 82 и 83, объединены в шину выхода 20. Конструкция блока сравнения позволяет перемещать микровыключатель с контактом 83 в диапазоне 30-100% максимального угла поворота вала сельсин- приемника 81, что соответствует 30-100% макси.мального момента лебалансов вибро- погружате:1Я.
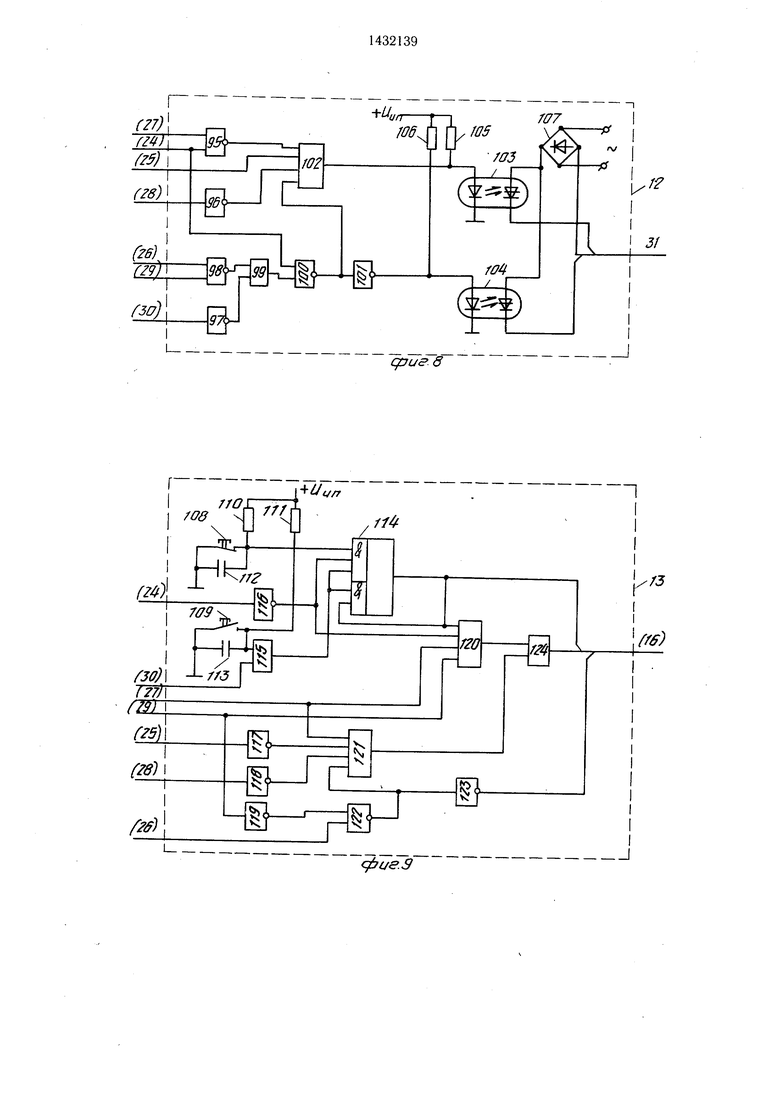
8 сравнения частоты вращения дебалансов (фиг. 6) выполнен в виде вольтметра, подключенного измерительным механизмом 86 со встроенным источником излучения (tie показан) к выходу датчика 2 и имеющего подвижные ограничители диапазона с фоторезисторами 87 и 88, оптически связанными с измерительным механизмом 86 и подключенными к усилителям 89 и 90 соответственно, выходы 91 и 92 которых объединены в щину выхода 21.
Блок 9 температурной защиты представляет собой датчик температуры, встроенный в лобовые части обмоток элекродвигателя 46, и реле, соединенное с указанным датчиком температуры и имеющее нормально открытый контакт, подключенный к щине выхода 23.
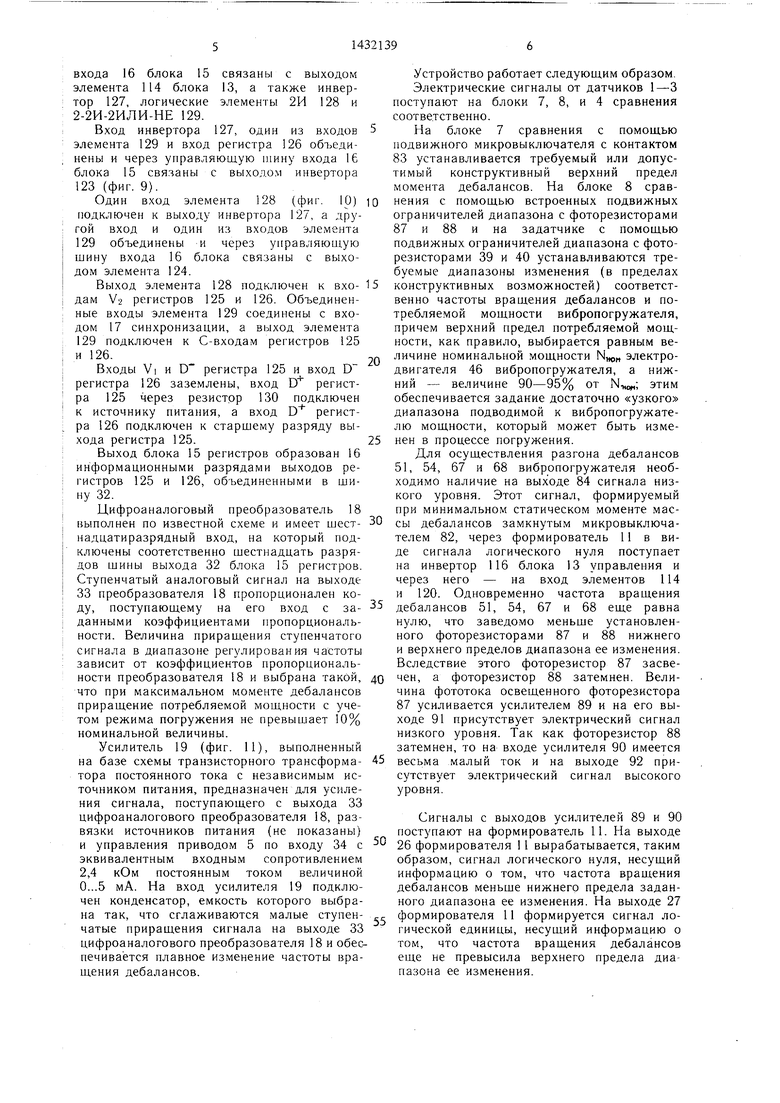
Многоканальный формирователь 11 сигналов содержит, например, семь идентичных каналов 93 (фиг. 7)., выполненных на базе интегральных микросхем компараторов 94. Входы 84, 85, 91, 92, 43 и 44 многоканального формирователя 11 подключены к соответствующим выходам блоков 4, 7 и 8, а соответствующие этим входам выходы 24-30 связаны с входами блоков 12 и 13 управления.
Блок 12 (фиг. 8) содержит логический элемент ИЛИ-НЕ 95, входы которого подключены к выходам 24 и 27 формирователя 11, инверторы 96 и 97, подключенные своими входами соответственно к выходам 28 и 30 формирователя II, логический элемент ИЛИ-НЕ 98, входы которого подключены к выходам 26 и 29 формирователя 11. Выходы инвертора 97 и элемента 98 подключены к входам логического элемента ИЛИ 99, выход которого подсоединен к одному входу логического элемента И-НЕ 100 другой вход которого соединен с выходом 24 фор.мирователя 11. Выход элемента 100 под ключей к входу инвертора 101 и одному из входов логического элемента И 102, к другим входам которого подключены выходы элемента 95, инвертора 96 и выход 25 формирователя П.
Блок 12 управления содержит также два оптотиристора 103 и 104, отрицательные выводы которых заземлены. Положительный вывод оптотиристора 103 подключен к выходу элемента 102 и к одному выводу резистора 105, другой вывод которого подключен к источнику питания (не
0
показан). Положительный вывод оптотиристора 104 соединен с выходом инвертора 101 и с одним выводом резистора 106, другой вывод которого подключен к источнику
питания.
Выводы анодов оптотиристоров 103 и 104 подсоединены к положительному выводу выпрямительного диодного моста 107, отрицательный вывод которого подключен к объе„ диненному выводу контакторов 69 и 70 привода 6. Вход моста 107 подключен к источнику переменного тока. Выводы катодов оптотиристоров 103 и 104 образующие с отрицательным выводом моста 107 шину выхода 3 блока 12, подключень
5 соответственно к контакторам 70 и 69 привода 6.
Блок 13 управления (фиг. 9). содержит кнопку «Пуск 108 и кнопку «Стоп 109, которые расположены на пульте управления (не показан), одни из выводов которых заземлены, а другие через соответствующие резисторы ПО и ill соединены с источником питания. Параллельно кнопкам 108 и 109 подключены конденсаторы 112 и 113 соответственно. Объединенный вывод
5 кнопки 108, резистора 110 и конденсатора
112подключен к входу логического элемента 2-ЗИ-2ИЛИ 114. Объединенный вывод кнопки 109, резистора П и конденсатора
113соединен, с одним из входов логического элемента И 115, к другому вхо0 ду которого подключен выход 30 формирователя 11, а выход элемента 115 подк.тючен К- соответствующим входам элемента 114. Блок 13 также содержит инверторы 116- 119, входы которых подключены соответственно к выходам 24, 25, 28 и 29 фор5 мирователя 11, логический элемент И 120, одни из входов которого подсоединены к выходам 27 и 29 формирователя 11, логический элемент И 121, один из входов которого подключен к выходу 27 форQ мирователя 11, и логический элемент И-НЕ 122, один из входов которого соединен с выходом 26 формирователя 11, а другой его вход подключен к выходу инвертора 119.
Выход инвертора 116 подключен к од5 ному из входов элемента 114 и одному из входов элемента 120. Выход элемента
114соединен с одним из его входов, образуя положительную обратную связь, а также с одним из входов элемента 120,
К входам элемента 121 подключены так- 0 же выходы инверторов 117, 118 и элемента 122, выход которого соединен также с входом инвертора 123. Выходы элементов 120 и 121 подключены к входам логического элемента ИЛИ 124. Выходы элементов 114, 123 и 124 образуют управ- ляющую шину выхода блока 13.
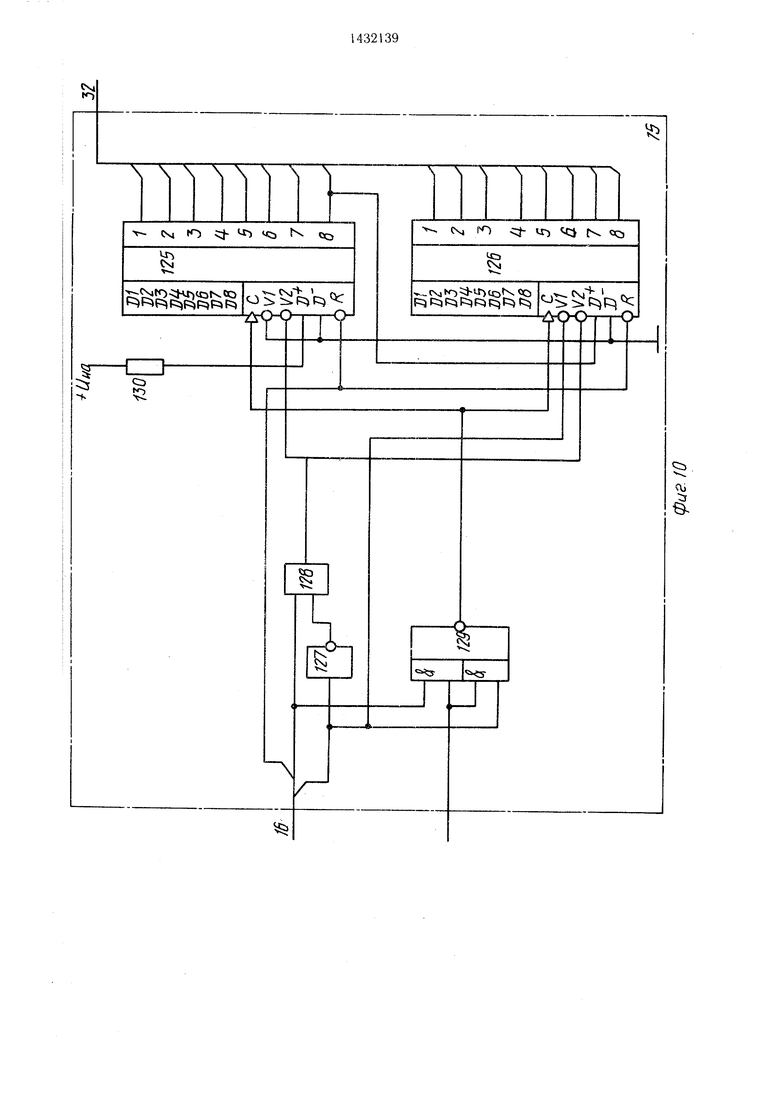
Блок 15 (фиг. 10) регистров содержит регистры 125 и 126, R-входы которых объединены и через управляющую щину
входа 16 блока 15 связаны с выходом элемента 114 блока 13, а также инвертор 127, логические элементы 2И 128 и 2-2И-2ИЛИ-НЕ 129.
Вход инвертора 127, один из входов элемента 129 и вход регистра 126 объединены и через унравляющую тину входа 16 блока 15 связаны с выходом инвертора 123 (фиг. 9).
Один вход элемента 128 (фиг. 10) подключен к выходу инвертора 127, а другой вход и один из входов элемента 129 объединены и через унравляющую шину входа 16 блока связаны с выходом элемента 124.
Выход элемента 128 подключен к вхо- дам VL) регистров 125 и 126. Объединенные входы элемента 129 соединены с входом 17 синхронизации, а выход элемента 129 подключен к С-входам регистров 125 и 126.
Входы Vi и D регистра 125 и вход D регистра 126 заземлены, вход D регистра 125 через резистор 130 подключен к источнику нитания, а вход D регистра 126 подключен к старшему разряду выхода регистра 125.
Выход блока 15 регистров образован 16 информационными разрядами выходов регистров 125 и 126, объединенными в шину 32.
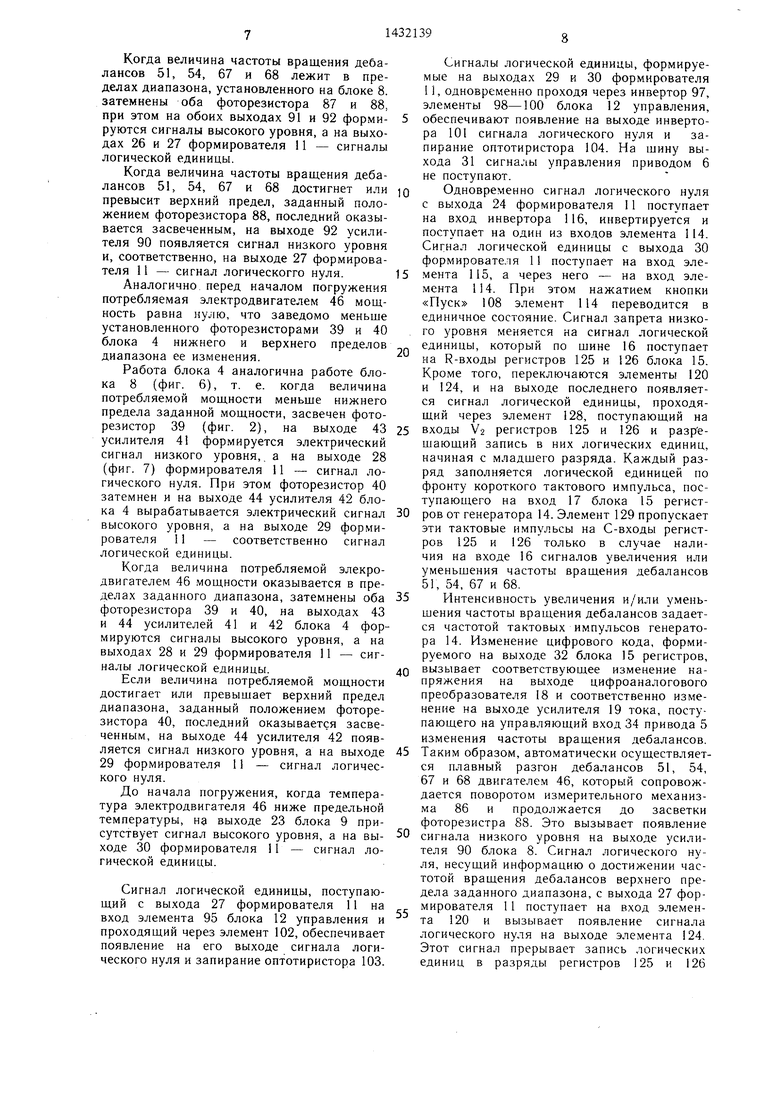
Цифроаналоговый преобразователь 18 выполнен по известной схеме и имеет шест- надцатиразрядный вход, на который подключены соотетственно шестнадцать разрядов шины выхода 32 блока 15 регистров. Ступенчатый аналоговый сигнал на выходе 33 преобразователя 18 пропорционален коду, поступающему на его вход с за- данными коэффициентами пропорциональности. Величина приращения ступенчатого сигнала в диапазоне регулирования частоты зависит от коэффициентов пропорциональности преобразователя 18 и выбрана такой, что при максимальном моменте дебалансов приращение потребляемой мощности с учетом режима погружения не превышает 10% номинальной величины.
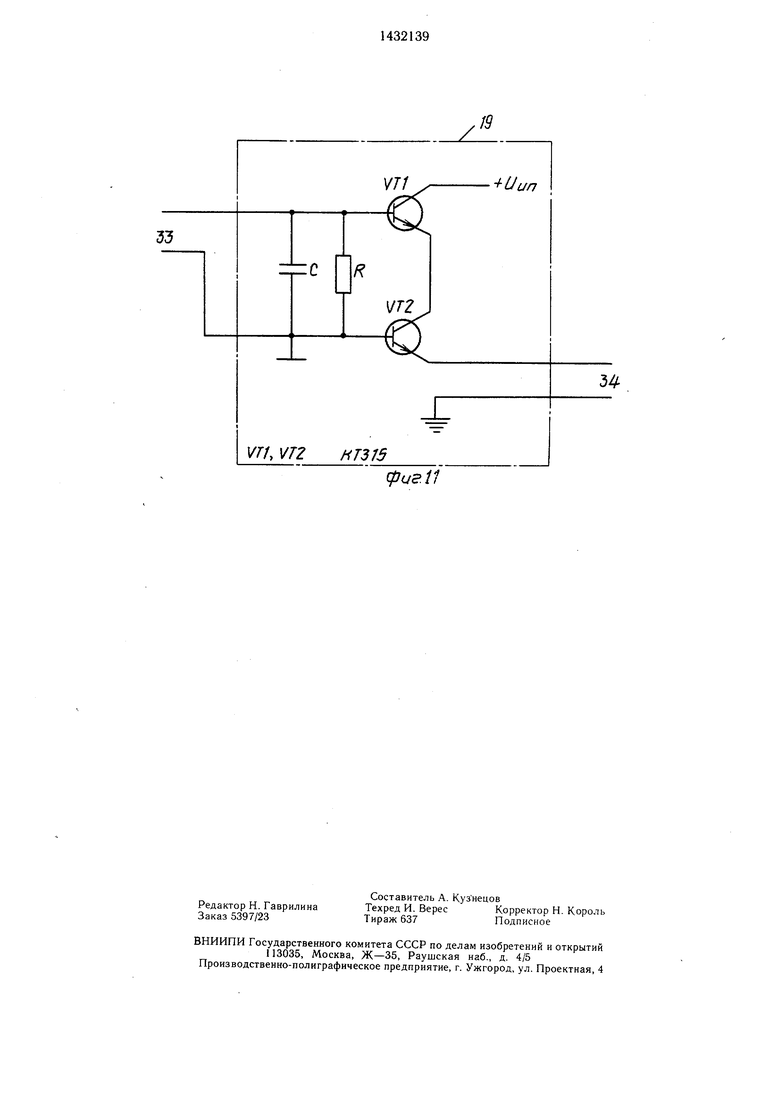
Усилитель 19 (фиг. 11), выполненный на базе схемы транзисторного трансформа- тора постоянного тока с независимым источником питания, предназначен для усиления сигнала, поступающего с выхода 33 цифроаналогового преобразователя 18, развязки источников питания (не показаны) и управления приводом 5 по входу 34 с эквивалентным входным сопротивлением 2,4 кОм постоянным током величиной 0...5 мА. На вход усилителя 19 подключен конденсатор, емкость которого выбрана так, что сглаживаются .малые ступен- чатые приращения сигнала на выходе 33 цифроаналогового преобразователя 18 и обес печиваётся плавное изменение частоты вращения дебалансов.
Устройство работает следующим образом.
Электрические сигналы от датчиков 1-3 поступают на блоки 7, 8, и 4 сравнения соответственно.
На блоке 7 сравнения с помощью подвижного микровыключателя с контактом 83 устанавливается требуемый или допустимый конструктивный верхний предел момента дебалансов. На блоке 8 сравнения с помощью встроенных подвижных ограничителей диапазона с фоторезисторами 87 и 88 и на задатчике с помощью подвижных ограничителей диапазона с фоторезисторами 39 и 40 устанавливаются требуемые диапазоны изменения (в пределах конструктивных возможностей) соответственно частоты вращения дебалансов и потребляемой мощности вибропогружателя, причем верхний предел потребляемой мощности, как правило, выбирается равным величине номинальной мощности электродвигателя 46 вибропогружателя, а нижний - величине 90-95% от этим обеспечивается задание достаточно «узкого диапазона подводимой к вибропогружателю мощности, который может быть изменен в процессе погружения.
Для осуществления разгона дебалансов 51, 54, 67 и 68 вибропогружателя необходимо наличие на выходе 84 сигнала низкого уровня. Этот сигнал, формируемый при минимальном статическом моменте массы дебалансов замкнутым микровыключателем 82, через формирователь 11 в виде сигнала логического нуля поступает на инвертор 116 блока 13 управления и через него - на вход элементов 114 и 120. Одновременно частота вращения дебалансов 51, 54, 67 и 68 еще равна нулю, что заведомо меньше установленного фоторезисторами 87 и 88 нижнего и верхнего пределов диапазона ее изменения. Вследствие этого фоторезистор 87 засвечен, а фоторезистор 88 затемнен. Величина фототока освещенного фоторезистора 87 усиливается усилителем 89 и на его выходе 91 присутствует электрический сигнал низкого уровня. Так как фоторезистор 88 затемнен, то на входе усилителя 90 имеется весьма малый ток и на выходе 92 присутствует электрический сигнал высокого уровня.
Сигналы с выходов усилителей 89 и 90 поступают на формирователь 11. На выходе 26 формирователя 11 вырабатывается, таким образом, сигнал логического нуля, несущий информацию о том, что частота вращения дебалансов меньще нижнего предела заданного диапазона ее изменения. На выходе 27 формирователя И формируется сигнал логической единицы, несущий информацию о том, что частота вращения дебалансов еще не превысила верхнего предела диапазона ее изменения.
Когда величина частоты вращения деба- лансов 51, 54, 67 и 68 лежит в пределах диапазона,установленного на блоке 8. затемнены оба фоторезистора 87 и 88, при этом на обоих выходах 91 и 92 форми- руются сигналы высокого уровня, а на выходах 26 и 27 формирователя 11 - сигналы логической единицы.
Когда величина частоты вращения деба- лансов 5, 54, 67 и 68 достигнет или превысит верхний предел, заданный положением фоторезистора 88, последний оказывается засвеченным, на выходе 92 усилителя 90 появляется сигнал низкого уровня и, соответственно, на выходе 27 формирователя 11 - сигнал логическогго нуля.
Аналогично перед началом погружения потребляемая электродвигателем 46 мощность равна нулю, что заведомо меньше установленного фоторезисторами 39 и 40 блока 4 нижнего и верхнего пределов диапазона ее изменения.
Работа блока 4 аналогична работе блока 8 (фиг. 6), т. е. когда величина потребляемой мощности меньше нижнего предела заданной мощности, засвечен фоторезистор 39 (фиг. 2), на выходе 43 усилителя 41 формируется электрический сигнал низкого уровня,, а на выходе 28 (фиг. 7) формирователя 11 - сигнал логического нуля. При этом фоторезистор 40 затемнен и на выходе 44 усилителя 42 блока 4 вырабатывается электрический сигнал высокого уровня, а на выходе 29 формирователя 11 - соответственно сигнал логической единицы.
Когда величина потребляемой элекро- дБигателем 46 мощности оказывается в пределах заданного диапазона, затемнены оба фоторезистора 39 и 40, на выходах 43 и 44 усилителей 41 и 42 блока 4 формируются сигналы высокого уровня, а на выходах 28 и 29 формирователя 11 - сигналы логической единицы.
Если величина потребляемой мощности достигает или превышает верхний предел диапазона, заданный положением фоторезистора 40, последний оказывается засвеченным, на выходе 44 усилителя 42 появляется сигнал низкого уровня, а на выходе 29 формирователя 11 - сигнал логического нуля.
До начала погружения, когда температура электродвигателя 46 ниже предельной температуры, на выходе 23 блока 9 присутствует сигнал высокого уровня, а на вы- ходе 30 формирователя 11 - сигнал логической единицы.
Сигнал логической единицы, поступающий с выхода 27 формирователя 11 на вход элемента 95 блока 12 управления и проходящий через элемент 102, обеспечивает появление на его выходе сигнала логического нуля и запирание оптотиристора 103.
0
5 0
5
0
5
Сигналы логической единицы, формируемые на выходах 29 и 30 формирователя 11, одновременно проходя через инвертор 97, элементы 98-100 блока 12 управления, обеспечивают появление на выходе инвертора 101 сигнала логического нуля и запирание оптотиристора 104. На шину выхода 31 сигналы управления приводом 6 не поступают.
Одновременно сигнал логического нуля с выхода 24 формирователя 11 поступает на вход инвертора 116, инвертируется и поступает на один из входов элемента 114. Сигнал логической единицы с выхода 30 формирователя 11 поступает на вход элемента 115, а через него - на вход элемента 114. При этом нажатием кнопки «Пуск 108 элемент 114 переводится в единичное состояние. Сигнал запрета низкого уровня меняется на сигнал логической единицы, который по шине 16 поступает на R-входы регистров 125 и 126 блока 15. Кроме того, переключаются элементы 120 и 124, и на выходе последнего появляется сигнал логической единицы, проходящий через элемент 128, поступающий на входы V2 регистров 125 и 126 и разр е- шающий запись в них логических единиц, начиная с младшего разряда. Каждый разряд заполняется логической единицей по фронту короткого тактового импульса, поступающего на вход 17 блока 15 регистров от генератора 14. Элемент 129 пропускает эти тактовые импульсы на С-входы регистров 125 и 126 только в случае наличия на входе 16 сигналов увеличения или уменьшения частоты вращения дебалансов 51, 54, 67 и 68.
Интенсивность увеличения и/или уменьшения частоты вращения дебалансов задается частотой тактовых импульсов генератора 14. Изменение цифрового кода, формируемого на выходе 32 блока 15 регистров, вызывает соответствующее изменение напряжения на выходе цифроаналогового преобразователя 18 и соответственно изменение на выходе усилителя 19 тока, поступающего на управляющий вход 34 привода 5 изменения частоты вращения дебалансов. Таким образом, автоматически осуществляется плавный разгон дебалансов 51, 54, 67 и 68 двигателем 46, который сопровождается поворотом измерительного механизма 86 и продолжается до засветки фоторезистра 88. Это вызывает появление сигнала низкого уровня на выходе усилителя 90 блока 8. Сигнал логического нуля, несущий информацию о достижении частотой вращения дебалансов верхнего предела заданного диапазона, с выхода 27 формирователя 11 поступает на вход элемента 120 и вызывает появление сигнала логического нуля на выходе элемента 124. Этот сигнал прерывает запись логических единиц в разряды регистров 125 и 126
блока 15, и частота вращения дебалан- сов перестает увеличиваться.
Одновременно сигнал логического нуля с выхода 27 формирователя 11 поступает на вход элемента 95 блока 12 управления и, проходя через элемент 102, вызывает появление сигнала логической единицы на выходе последнего, что приводит к отпиранию оптотиристора 103 и срабатыванию контактов 71 контактора 69. Вал электродвигателя 73 начинает вращать червяк 75, который через червячное колесо 76, вал 77 и червяк 78 приводит во вращение венец 61, который изменяет фазу вращения сателлитов 57 и 58 щестерни 59, а следовательно, и дебалансов 67 и 68 по отношению к фазе вращения дебалансов 51 и 54.
Если величина потребляемой мощности, регистрируемая блоком 3, не превышает нижнего предела заданного диапазона, то в ходе работы продолжается увеличение статического момента массы дебалансов.
Если величина потребляемой мощности превысит нижний предел, заданный положением фоторезистора 39, то на выходе 28 формирователя 11 появляется сигнал логической единицы. Он поступает на вход инвертора 96 блока 12 управления и вызывает переключение элемента 102 так, что на вход оптотиристора 103 поступает сигнал логического нуля, что приводит к его запиранию после очередного спада до нуля мгновенного значения выпрямленного мостом 107 двухполупериодного напряжения. При этом контакты 71 контактора- 69 размыкаются и электродвигатель 73 обесточивается. Увеличение статического момента массы дебалансов 51, 54, 67 и 68 прекращается.
В том случае, когда значение потребляемой мощности превышает верхний предел заданного диапазона, на выходе 29 формирователя 11 появляется сигнал логического нуля. Этот сигнал поступает на вход инвертора 119 и вызывает переключение элемента 122 и инвертора 123 так, что на выходе инвертора 123 появляется сигнал логической единицы при условии, что с выхода 26 формирователя 11 поступал сигнал логической единицы, т. е. . частота вращения дебалансов была не меньше заданного нижнего предела ее изменения.
Сигнал логической единицы с выхода инвертора 123 блока 13 управления поступает на вход Vi регистра 126 и задает режим последовательной записи логических нулей в его выходные разряды, начиная с наиболее старшегр, где была записана последняя логическая единица. Это обеспечивает снижение частоты вращения дебалансов 51, 54, 67 и 68 (фиг. 3), а следовательно, и снижение потребляемой мощности.
Таким образом, блоки 12, 13 и 15 управляют подстройкой параметров вибропогружателя к изменяющимся внещним условиям и тем самым поддерживается уровень потребляемой мощности в заданном диапазоне. Снижение потребляемой мощности вызывает поворот измерительной части 37 в сторону нулевого положения. Фоторезистор 39 оказывается засвеченным. На выходе уси
лителя 41 вследствие этого возникает сиг0
нал низкого уровня, который, пройдя через формирователь 11, в виде сигнала логического нуля поступает на вход инвертора 96 блока 12 управления. На все входы элемента 102 поступают сигналы логической
5 единицы и на оптотиристор 103 поступает открывающий его сигнал логической единицы, который обеспечивает увеличение суммарного статического момента массы дебалансов 51, 54, 67 и 68, а также изменение угла поворота червяка 79, червячного колеса 80 и вала датчика 1. Если величина статического момента массы дебалансов, фиксируемая датчиком 1, достигает значения, заданного положением подвижного микровыключателя с контактом 83,
5 т. е. поворот вала сельсин-приемника 81 вызывает замыкание этого контакта, то на выходе 85 появляется сигнал низкого уровня, а на выходе 25 формирователя 11 формируется сигнал логического нуля, поступающий на элемент 102 блока 12 управ0 ления. Это вызывает запирание оптотиристора 103 и прекращение увеличения статического момента массы дебалансов. Одновременно сигнал логического нуля с выхода 25 формирователя 1 1 поступает на вход инвертора 117 блока 13 управления и
5 переключает элементы 121 и 124 так, что на выходе элемента 124 появляется сигнал логической единицы. Этот сигнал обеспечивает увеличение частоты вращения двигателя 46 и дебалансов 51, 54, 67 и 68
п до тех пор, пока величина потребляемой мощности не достигнет верхнего .предела диапазона, заданного на блоке 4.
В силу того, что величина статического момента массы дебалансов в ходе погружения по описанному алгоритму дости5 гает максимального заданного значения, погружение сваи на больщой глубине осуществляется с наибольшей эффективностью. Если свая попала в слой грунта с большим коэффициентом лобового сопротивления, то-величина потребляемой мощности возрас0 тает, например, до верхнего заданного предела. Тогда на выходе инвертора 123 блока 13 появляется сигнал логической единицы и частота вращения дебалансов 51, 54, 67 и 68 уменьшается вплоть до нижнего предела, заданного положением фо- торезистора 87, который оказывается засвеченным. Сигнал низкого уровня с выхода усилителя 89 блока 8, пройдя через формирователь 11, поступает на вход элемента 98, переключает элементы 99-101 и вызывает отпирание оптотиристора 104, т. е. уменьшение статического момента массы дебалансов 51, 54, 67 и 68, до тех пор, пока не снизится нагрузка на валу электродвигателя 46 и величина потребляемой им мощности не окажется в пределах заданного диапазона.
Прекращение работы вибропогружателя осуществляется нажатием на кнопку «Стоп 109, кратковременный сигнал низкого уровня сбрасывает элемент 114 в «О. Сигнал сброса поступает с его выхода на R-BXO- ды регистров 125 и 126, в их выходные разряды записываются сигналы логического нуля, что вызывает плавную ос- тановку электродвигателя 46 и дебалансов 51, 54, 67 и 68. Вследствие снижения частоты вращения дебалансов на выходе 91 усилителя 89 появляется сигнал низкого уровня, а на выходе 26 формировате- ля 11 - сигнал логического нуля, который поступает на элемент 98, вызывает соответствующее переключение элементов 99- 01 и отпирание оптотиристора 104, управляющего уменьшением статического момента массы дебалансов до минимального зна- чения.
Аналогично происходит остановка вибропогружателя при срабатывании блока 9 температурной защиты.
Устройство позволяет осуществить плав- ный разгон дебалансов 51, 54, 67 и 68 с заданным уровнем потребляемой мощности, что исключает перегрузку электродвигателя и дает возможность применить питающие элекростанции с мощностью, не более чем в 1,5 раза превышающей мощность вибропогружателя.
Поддержание мощности в узком диапазоне номинального значения особенно важно на заключительной стадии погружения, когда необходимо реализовать наибольшую возможную мощность для преодоления сопротивления грунтов сваей на большой глубине, чтобы не допустить ее защемле
g 5
.,
5
0
ния (з-за уменьшения амплитуды вибрации) при недоиспользованной мощности с немаксимальными параметрами; частотой вращения и моментом дебалансов.
Формула изобретения
Устройство управления свайным вибропогружателем, содержащее датчики статического момента массы и частоты вращения дебалансов, датчик и задатчик потребляемой мощности вибропогружателя и приводы изменения частоты вращения и статического момента массы дебалансов, отличающееся тем, что, с целью повышения точности управления, оно снабжено задат- чиками статического мо.мента массы и частоты вращения дебалансов, блоками сравнения мощности вибропогружателя, статического момента массы и частоты враще ия дебалансов, блоком температурной защиты, формирователем сигналов, первым и вторы. блоками управления, генератором синхроимпульсов, блоком регистров, цифроаналого- вым преобразователем и усилителем, причем датчики и задатчики потребляемой мощности вибропогружателя, статического момента массы и частоты вращения дебалансов подключены к соответствующим входам блоков сравнения мощности вибропогружателя, статического момента массы и частоты вращения дебалансов, выходы которых и блока температурной защиты подключены к соответствующим входам формирователя сигналов, выходы которого подключены к соответствующим входам первого и второго блоков управления, выход первого блока управления соединен с приводом изменения статического момента массы дебалансов, выход второго блока управления соединен с одним входом блока регистров, другой вход которого соединен с генератором синхроимпульсов, а выход блока регистров через последовательно соединенные цифроаналоговый преобразователь и усилитель соединен с приводом изменения частоты вращения дебалансов.
Г
1432139
--Ж-1/
6
.
п
4Ъ
LtZE ihf-7--
(pue.Z
7
6
6
п
/
ъ8
ZZ
55 57
78
(игз
/
3/
/L
L
70 69
7/
73
H
.J
фие.
фаз.5
М--- i 85
«J
сО
фцаб
21
i/ij
.//
24
5
-yj ,5 С-/5
1 /5
1 27
28
Срие.З
фие.З
csi Ю vh «i f 00
ifi CSj
СЧ,К-)1ЛГ) (F5)
)
m
O
.
C4i ro t- « J r OQ
ip M
r4ibo f to O ):
.j
. 1
ЭД
АО-От-гО
CXj
t
ЪЪ
f fr
T1, VTZ HT3J5
/
J9
uai1
| Система управления вибропогружателем | 1983 |
|
SU1157165A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 0 |
|
SU199230A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
