Известны способы управления режимом работы свайиого вибропогружателя путем регулирования вибратора (настройки его в резонанс) в соответствии с непрерывно изменяющимися условиями погружения сваи, которые при этом измеряются датчиками, фиксирующими в общем случае характеристики колебаний погружаемой сваи и подающими сигналы на дискриминатор. Затем через управляющее устройство управляют работой вибропогружателя.
Недостатки известных способов в том, что в них нерационально используется мощность вибропогружателя и соответственно оказывается низкой его погружающая способность.
Предложенный способ лишен этих недостатков. Сущность его в том, что режим вибрации вибропогружателя регулируют с помощью связанного, например электрически, с датчиками потребляемой мощности и характеристик движения погружаемого элемента оптимизатора, в частности, с программным устройством. Управляющие сигналы с оптимизатора подают через суммирующий коммутатор к приводам регуляторов режима вибрации.
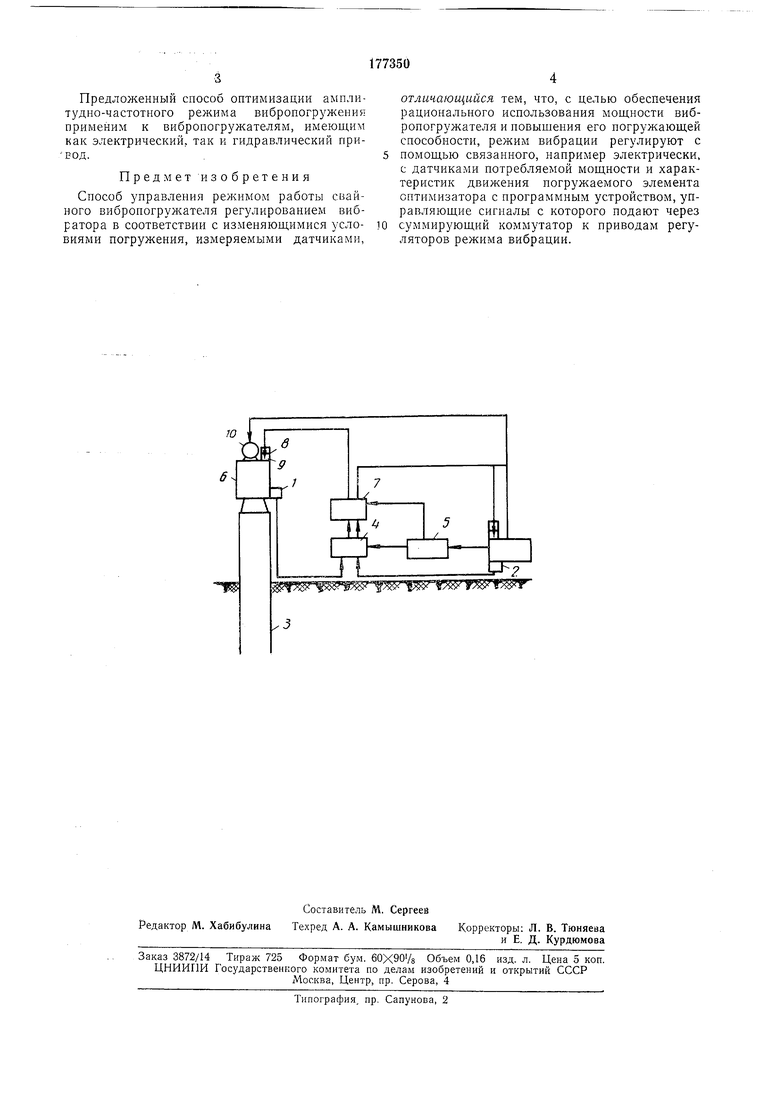
На чертеже изображена схема устройства, с помощью которого осуществляется предложенный способ.
1.Датчики 1 и 2, фиксирующие в общем случае характеристики колебания конструкции 3 (амплитуда, частота, в необходимых случаях и ускорение), режимы погружения
(потребляемая мощность, скорость погружения).
2.Оптимизатор 4, представляющий собой устройство, воспринимающее информацию от датчиков / и 2 и программного устройства 5,
сравнивающего ее с предыдущей информацией и на основании этого вырабатывающего сигналы для управления режимом работы вибратора 6. Программное устройство 5 выдает командные импульсы для синхронизации работы всех устройств системы, а также прогнозирует в соответствии с закладываемой программой требуемое изменение режима работы вибратора,
3.Суммирующий коммутатор 7, управляемый программным устройством 5; он формирует окончательные управляющие сигналы изменения амплитудно-частотных режимов для системы привода 8 регулятора 9 амплитуды и, следовательно, частоты, изменяя число
оборотов приводного двигателя 10 вибропогружателя.
Таким образом, непрерывно поступающая от датчиков / и 2 информация производит подстройку всей системы на оптимальный реПредложенный способ оптимизации амплитудно-частотного режима вибропогружения применим к вибропогружателям, имеющим как электрический, так и гидравлический приЕОД.
Предмет изобретения
Способ управления режимом работы свайного вибропогружателя регулированием вибратора в соответствии с изменяюш,имися условиями погружения, измеряемыми датчиками,
отличающийся тем, что, с целью обеспечения рационального использования мощности вибропогружателя и повыщения его погружающей способности, режим вибрации регулируют с помощью связанного, например электрически, с датчиками потребляемой мощности и характеристик движения погружаемого элемента оптимизатора с программным устройством, управляющие сигналы с которого подают через суммирующий коммутатор к приводам регуляторов режима вибрации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ СВАЙНОГО ВИБРОПОГРУЖАТЕЛЯ | 1972 |
|
SU336399A1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ СВАЙНОГО ВИБРОПОГРУЖАТЕЛЯ | 1971 |
|
SU303397A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ ВО ВРЕМЯ ЭКСПЛУАТАЦИИ ВИБРОПОГРУЖАТЕЛЯ | 2018 |
|
RU2752847C2 |
| ВИБРОПОГРУЖАТЕЛЬ | 1995 |
|
RU2098557C1 |
| Сейсмический вибратор | 1985 |
|
SU1277036A1 |
| Устройство управления свайным вибропогружателем | 1986 |
|
SU1432139A1 |
| УСТРОЙСТВО ДЛЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1971 |
|
SU297013A1 |
| УНИВЕРСАЛЬНОЕ ВДАВЛИВАЮЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2388868C1 |
| Испытательный вибростенд | 1974 |
|
SU945704A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ВОЗБУЖДЕНИЯ УПРАВЛЯЕМОГО РЕАКТОРА | 1972 |
|
SU359732A1 |
